
关于自动驾驶汽车与刑事责任的考察
2019-02-19 01:08松尾刚行
法治现代化研究 2019年1期
[日]松尾刚行
一、自动驾驶汽车现状
2017年12月,深圳市首批智能公交车试运营;2017年12月,北京市交通委联合市公安交管局、市经济信息委等部门制定发布了《加快推进自动驾驶车辆道路测试有关工作的指导意见》和《自动驾驶车辆道路测试管理实施细则》,北京正式允许无人驾驶车上路测试;2018年2月,浙江宣布将建设首条超级高速公路,全面支持自动驾驶;2018年3月,全国首批3张智能网联汽车开放道路测试号牌在上海发放。①彭文华:《自动驾驶车辆犯罪的注意义务》,载《政治与法律》2018年第5期。根据前瞻产业研究院发布的《2018—2023年中国无人驾驶汽车行业发展前景预测与投资战略规划分析报告》数据显示,到2035年,中国在无人驾驶汽车市场上的份额将达到24%。
除了中国以外,现在很多国家都开始进行无人驾驶汽车的上路测试,然而,特斯拉、优步、谷歌以及苹果等知名公司的无人驾驶汽车都发生过交通事故,在此背景下,自动驾驶汽车交通肇事有关的刑事责任,已成为世界刑法学者讨论的新兴问题。
为此,本文旨在通过借鉴德国②可参见[瑞士]萨宾娜·格莱斯、[德]艾米丽·西尔弗曼、[德]托马斯·魏根特:《若机器人致害,谁将担责?——自动驾驶汽车与刑事责任》,陈世伟译,载陈兴良主编:《刑事法评论》(第40卷),中国政法大学出版社2017年版,第338-356页。与日本的经验,论析自动驾驶汽车有关的刑事责任问题。本文将依据国际汽车工程师学会(Society of Automotive Engineers,简称SAE)制定的自动驾驶汽车分级标准,首先讨论SAE第1等级到第3等级的自动驾驶汽车有关的刑事责任;然后讨论SAE第4等级和第5等级的自动驾驶汽车有关的刑事责任。
二、自动驾驶汽车分级与控制权困境(Control Dilemma)
(一)SAE对自动驾驶汽车的定义
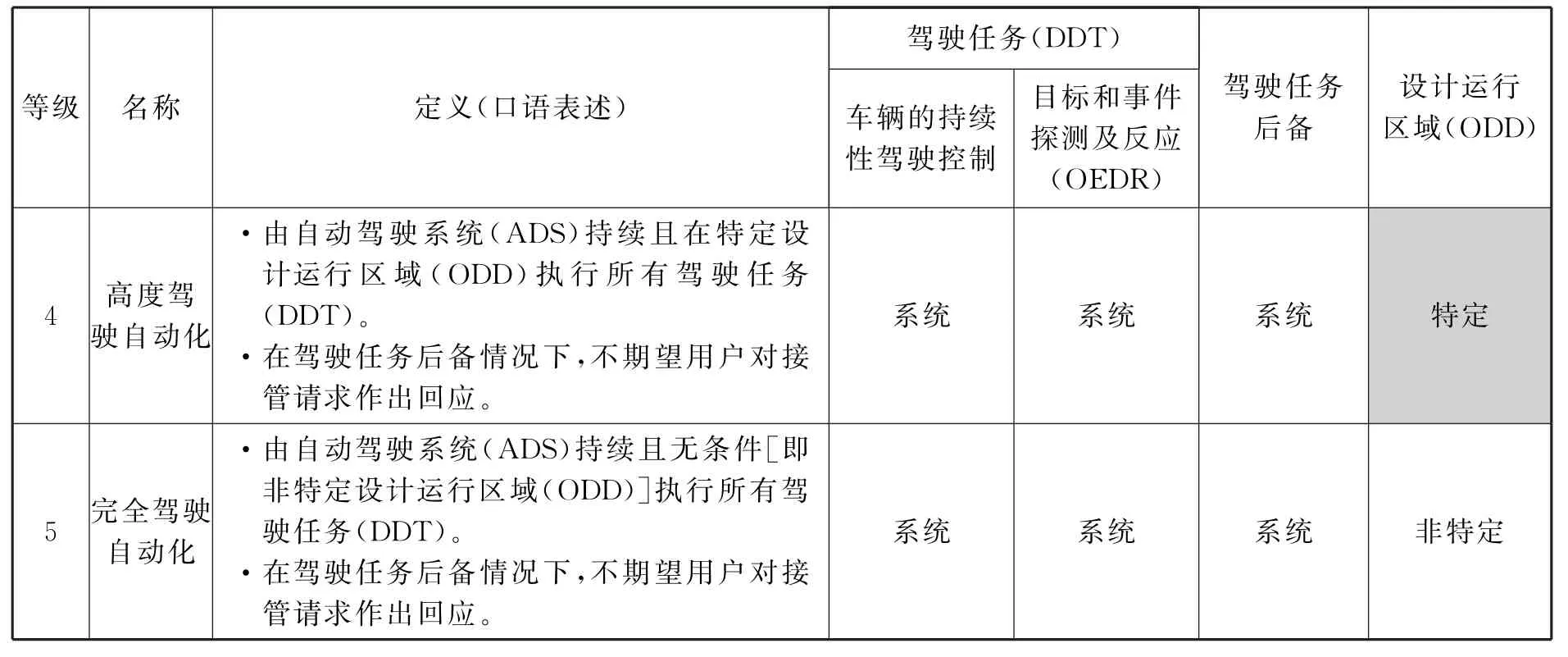
美国国家公路交通安全管理局(NHTSA)于2016年9月采用了SAE制定的自动驾驶汽车分级标准。根据驾驶任务的分担、后备(紧急情况下的接管)的有无、设计运行区域的有无,SAE分级标准将自动驾驶分为0至5等级。③[日]内阁官房IT综合战略室:《围绕自动驾驶等级之定义的动向与今后的对应(草案)》,载日本首相官邸官网,http://www.kantei.go.jp/jp/singi/it2/senmon_bunka/detakatsuyokiban/dorokotsu_dai1/siryou3.pdf,最后访问时间:2018年9月3日。
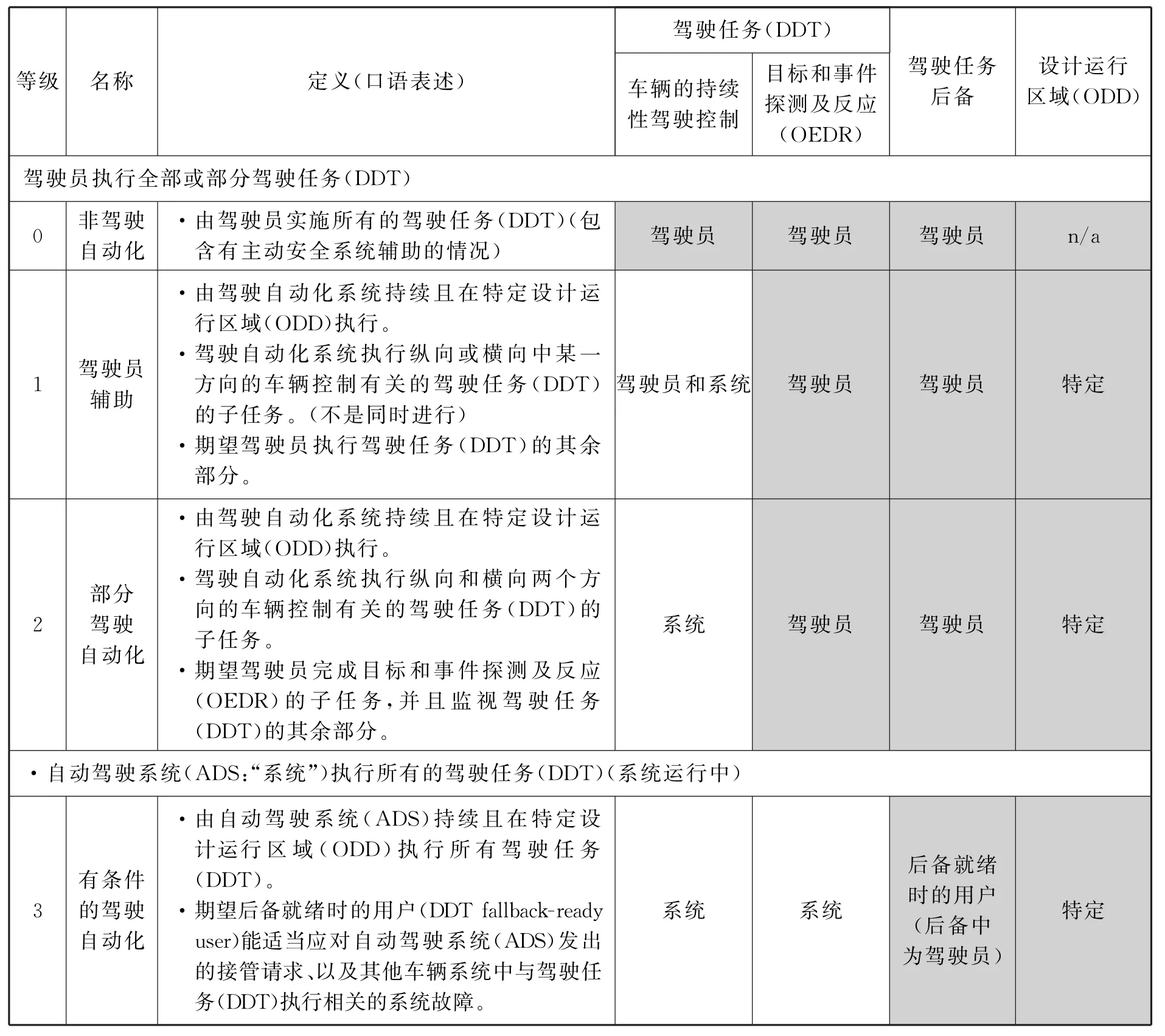
SAEJ3016(2016)
(续表)
自动驾驶汽车的“驾驶”这一概念与交通肇事罪认定的难易程度相关。在等级1—3中,由于存在驾驶员,因此比较容易以交通肇事罪立案追究驾驶员的刑事责任。但在等级4和等级5中已经没有驾驶员的概念,由此便产生了发生能不能追究“驾驶员”责任的问题。简单来说,与等级1—3相比,等级4和等级5的用户的责任将更加有限。
(二)相关人员
需要注意的是在自动驾驶汽车中存在较多的相关人员,一方面包括设计人员、制造者、销售商这些位于自动驾驶汽车的制造、流通过程中的人员;另一方面还包括驾驶员、使用者这些使用自动驾驶汽车进行移动的人。并且,例如在使用第三人所拥有的自动驾驶汽车时,所有人与驾驶员、使用者并非同一个人,由此可能产生所有人的单独责任问题。
除此之外,使用智能运输系统(Intelligent Transport Systems,简称ITS)的自动驾驶汽车需要依靠来自外部的信息,于是也有可能产生车与车、车与路、路与路之间的通信系统④参见[日]岸本健吾、山田雅也、神野正之:《使用700MHz频段的车与车、车与路、路与路之间的通信系统》,载《SEIテクニカルレビュー》第184号(2014年)。相关的通信运营商、系统设计人员的责任,以及空间数据运营商⑤参见[日]小林正启:《关于空间数据》,载“情報ネットワーク法学会网”,https://in-law.sakura.ne.jp/archive/taikai/2014/bunkakai2-Kobayashi.pdf,最后访问时间:2018年9月3日。的责任等问题。
在这些相关者中,特别重要的是位于制造、销售方面的设计人员、制造者、销售商(以下简称“制造者等”)的责任,以及拥有和使用制造、销售后的自动驾驶汽车的驾驶员、使用者、所有人(以下简称“使用者等”)的责任。因此,下文就这两点进行重点论述。
(三)控制权困境
无论是在德国还是在日本,所谓的“控制权困境”的问题,都被作为重点讨论的课题之一。总而言之,这是指应由谁(人抑或是车)来控制自动驾驶汽车的问题。
洛曼(Lohmann)⑥Melinda Florina Lohmann,Automatisierte Fahrzeuge im Lichte des Schweizer Zulassungs-und Haftungsrechts,Nomos,2016,S.197.将此认为是支配义务(Beherrschungsgebot)的问题。Lohmann以SVG第31条作为驾驶员应当负有支配义务的根据,认为在使用高度自动驾驶汽车和全自动驾驶汽车的情形中均应当履行支配义务,但同时认可存在通过提高自动驾驶汽车的安全性从而进行法律修改的余地。⑦“Der Fahrer muss seiner Pflicht zur Beherrschung,u.a.,durch Überwachung und Übersteuerung,nachkommen.”Lohmann,ibid.,S.207.
对此,希尔根多夫(Hilgendorf)认为该问题并不简单,并将其作为一种困境,从而提出了“控制权困境”的概念,⑧Eric Hilgendorf,Automatisiertes Fahren und Recht Deutscher Verkehrsgerichtstag(53.,2015,Goslar),Veröffentlichung der auf dem 53.Deutschen Verkehrsgerichtstag vom 28.bis30.Januar2015 in Goslar gehaltenen Vorträge,Referate und erarbeiteten Empfehlungen,Köln 2015,S.5572.以及Eric Hilgendorf,Teilautonome Fahrzeuge:Verfassungsrechtliche Vorgabe undrechtspolitische Herausforderungen.即在发生事故时,最终应当判断的是,是否违反了注意义务。但是,法院是否会认定自动驾驶汽车特别是全自动驾驶汽车的驾驶员(全自动驾驶汽车情形下的“使用者”)负有注意义务,目前仍不明确。例如,即使某辆汽车可以实现“全自动驾驶”,但法院仍有可能认定该车的使用者负有某种注意义务(如确认全自动驾驶功能是否确实妥当地运行、观察车辆周围的情况等)。他认为,在实务中,自动驾驶汽车在没有问题地持续行驶过程中,驾驶员(及使用者)的义务可能会逐渐减轻。在弥补处罚上的间隙的意义上承认这样的注意义务的确具有一定的正当性。但是,承认自动驾驶汽车的驾驶员及使用者处于这种“控制”的状态,意味着即使乘坐了自动驾驶汽车,也不能看书、写文章、玩手机或做其他事情,甚至可能存在由于自动驾驶汽车的故障或老化而机能低下,给人提供移动可能性方面的便利将大幅降低的情况。因此,在这种意义上可以说,分析在全自动驾驶的情况下是否也应当认为驾驶员及使用者在乘车过程中负有某种注意义务(控制义务)的问题(即所谓的“控制权困境”)是非常重要的。Hilgendorf建议通过立法解决,但是如果没有及时进行相关立法,这将成为解释论上的问题。
三、使用者等的责任
(一)Lohmann的分析
由于在等级1—3中存在驾驶员,因此在发生事故时,首先会追究驾驶员的责任。Lohmann按照德国BASt的定义进行了如下分析。
第一,在辅助阶段履行注意义务是驾驶员的责任,一味地按照导航而不小心撞到了过马路的行人,则相关责任的承担主体是驾驶员。而且,警告系统终归仅是辅助而已,不能仅以警告系统作为免责根据,不可以免除其驾驶时的注意义务。⑨前引⑥,SS.165166.
第二,半自动驾驶汽车的驾驶员始终负有注意义务,当自动驾驶汽车的操控违反法律规定时,驾驶员应被追究违反该义务的责任。⑩前引⑥,S.185.
第三,承认高度自动化但并非全自动驾驶的汽车在紧急情况下的介入义务。[11]前引⑥,S.197.不过,在刑法上,即使承认保障人的地位和因果关系,行为能力(Tatmacht)的有无也是需要讨论的问题,即保障人是否具有回避结果的可能性。Lohmann提到,对于高度自动化的汽车即使存在理论上的介入可能性,[12]与半自动驾驶汽车不同,并不追求瞬间进行切换,鉴于其有一定的缓冲时间。Lohmann,前引⑥,S.66.但实际上到底能够介入到何种程度,仍是个问题。[13]“Zwar sind hochautomatisierte Systeme per Systemdesign übersteuerbar,jedoch ist ihre faktische Übersteuerbarkeit aufgrund des Abwendens des Fahrers vom Fahrgeschehen zweifelt.”Lohmann,前引⑥,S.66.这被称为“处罚可能性的空白”(Strafbarkeitsvakuum)。[14]比如Lohmann,前引⑥,S.208.
(二)中川由贺的意见
中川由贺提到了与系统所承担的功能变化相对应的刑事责任的变化。[15][日]中川由贺:《自动驾驶导入后的交通事故的法的责任的变化:刑事责任与民事责任状况的不同》,载《中京lawyer》第25号。在进入讨论之前,中川由贺首先将自动驾驶分为三种情形:① 停止系统辅助的情形;② 系统在某路段上承担全部工作的情形;③ 系统从出发地开始至目的地为止承担全部行驶任务的情形。中川由贺认为,在①的情形中,判断的框架体系与没有系统的情形相同,但驾驶辅助系统的技术安全性极高,且社会上对安全性的此种认识成为普遍共识时,可能会引起扩大信赖原则适用范围的讨论。在②的情形中,在驾驶员驾驶时,则与过去的框架体系相同;在系统进行控制时,则与③相同。在此之上,中川由贺指出,情形②特有的问题在于,在系统发出警告至驾驶员接管为止的时间内,驾驶员的责任将根据驾驶员在警告时点立即接受任务的情形下能否回避结果的发生,即该时点的结果回避可能性的有无(过失的有无)而有所不同。关于③的情况,中川由贺认为,不能要求驾驶员负有注意义务,不能认定其存在过失,因此也不得追究其法律责任。而对于制造者的责任,中川由贺认为在法律适用或事实认定中,能够对制造者等追究刑事责任的情形应仅限于极特殊的案例。
(三)基于SAE等级的使用者责任
与驾驶员应持续注意周围情况的等级1和等级2不同,在等级3中,驾驶员通常情况下没有注意周围情况的必要,只需要在紧急时刻注意即可。[16]但是,真的“不需要注意”吗?可以参考等级4中的相关讨论以及控制权困境的问题。换句话说,等级1和等级2基本上可以原封不动地适用与等级0(通常的汽车)相同的框架体系,但是在等级3的情况下,驾驶员的责任从恒常注意义务限定为“转换时”及紧急时刻的注意义务,而驾驶员在警告时点即使立即接受任务也无法回避结果的话,则否定驾驶员的结果回避义务,[17]参见前引[15],中川由贺文;Lohmann,前引⑥,S.197.进而否定其责任。
到了等级4,由于没有驾驶员的概念,大致可以认为使用者等的责任与等级1—3相比将更加有限。等级4中的使用者等可能应当承担如下两种重要责任。
第一种是自动驾驶汽车的维护责任。例如,Hilgendorf曾以传感器污浊而没有注意到儿童的情况为例,认为在此种情形下,可能发生有关所有人的日常维护以及驾驶员和使用者在驾驶和使用时确认传感器等状况的过失问题。典型情形包括所有人怠于进行维修保养等(作为或不作为)而导致自动驾驶汽车的自动驾驶功能未处于可完全使用的状态;又或者是使用者怠于履行使用时的确认义务,未确认汽车是否处于可安全使用的状态而使用。前述两种典型情形下的归责,可以说是以所谓的产品等的“误用”为理由而追究其责任。进行此种形式的归责,在刑法理论上基本是可行的。[18]关于所有者到底负有何种程度的维护义务,使用者到第几等级为止负有确认义务,这些都是残留下来的问题。例如,“就算是进行了应该进行的维护却依然发生了事故”的话,那么就有可能在结果回避义务的问题上否定使用者等的责任。
第二种是即使技术层面满足了等级4的要求,但法律层面仍有可能要求使用者承担对周围状况等的注意、观察义务。这正体现了Hilgendorf所说的控制权困境的问题。[19]但在等级3中也可能发生控制权困境的问题。也就是说,等级3,就算在技术上仅在紧急状况下需要驾驶员的注意或者观察,但在法律上依然可能被要求注意或者观察。又或者,比如为了提高安全性,在能够认可结果回避可能性的早期阶段就发出警告的话,的确能减少处罚的间隙,但是这会导致频繁警告,驾驶员回归到驾驶,发生与要求事实上持续注意和观察相同的结果。对此,有人提出如下观点:[20]刘蓝璟、刘卫华:《自动驾驶模式下交通肇事罪的认定》,载《法制与经济》2018年第2期。如果在自动驾驶系统操控下发生相同情况,驾驶员实施了相同违章行为,且自动驾驶系统存在自身缺陷或故障,两者共同作用导致事故发生,在此情况下就不宜一律认定驾驶员负事故主要责任。因为,导致事故发生的驾驶行为是由人类驾驶员与自动驾驶系统共同完成的,驾驶员的作用可能会占较小权重,这就说明其法益侵害程度较小,如果仍认定其负事故主要责任则不合理。但是,让自动驾驶系统负事故责任又显荒唐,对此,本文的初步看法是,先将自动驾驶系统与驾驶员看作一个统一主体,将其行为与其他主体的行为进行比较,确定各自的事故责任大小,然后再划分自动驾驶系统与驾驶员对事故发生所发挥的作用大小,据此确定驾驶员对整个事故应负的责任大小。
四、制造者等的责任
(一)一般论
对于制造者等会产生产品责任(是否构成刑法上的业务过失致死伤罪)的问题。虽然在民事范围内比较容易认可制造者等的产品责任,但在判断其刑事责任时则应在一定程度上予以限定。[21][日]北川佳世子:《关于制造物责任的刑法上的问题点》,载《早稻田法学》第71卷2号。
关于刑事产品责任,一般分为制造、销售阶段和产品流通后两个阶段进行论述。[22]例如,[日]稻垣悠一:《有关缺陷制品的刑事过失责任与不作为犯论》,专修大学出版局2014年版,第205页。但作为中间形态,有“药害艾滋绿十字渠道”,参见大阪高裁判决2002年8月21日判时第1804号第146页,以及东京地裁2005年9月30日判时第1921号第154页。
首先,因制造、销售阶段的过失而引发问题的案件包括仙台高判昭和五十二年(1977年)2月10日判例时报846号第43页;[23]作为食品制造业者负有职务上的防范鼠患以及防止因制造和贩卖被以老鼠的粪尿为介质传播的病原微生物污染的炸胡萝卜鱼肉饼而造成中毒事故的注意义务,但由于懈怠,被告人的工厂制造了附着沙门氏菌的炸胡萝卜鱼肉饼,并引起了食物中毒,因而被判有罪的事件。最决昭和五十五年(1980年)4月18日刑集34卷3号第149页;[24]京都府的具有河豚处理资格的厨师提供的虎河豚的肝料理引起了客人的河豚中毒症状,从而被认定为具有预见可能性的事件。最决昭和五十四年(1979年)11月19日刑集33卷7号第728页;[25]用在木质长椅下放置电热炉的方式来开发和制作组合式桑拿浴池的从业者,由于没有检查和确保其构造上的耐火性,导致在使用了上述桑拿浴池的澡堂内,上述木质长椅因长时间受到电热炉加热而逐渐碳化最终发生火灾,从而被认定为业务上失火罪的事件。最判昭和四十四年(1969年)2月27日判例TIMES232号第168页;[26]对于将粗制第二磷酸钠混入牛奶中制造出来的奶粉引起了死伤的结果负有过失责任的事例。以及福冈高判昭和五十七年(1982年)1月25日判TA469号第134页[27]在米糠油提纯工序的一环脱臭工序中,从腐蚀贯穿孔中泄漏出PCB导致多名经口腔摄入的人员罹患有机氯气中毒的事件。等。这些案件的意义在于以下方面:①提出了向引发产品事故的原因方追究过失责任的问题;②按照员工等对企业规模及制造过程的参与形态的复杂性,采用了组织关系的观察方法;③以现实具体地参与制造、销售过程的实际情况,或以管理和监督权限为连接点,提出了违反产品安全方面的注意义务的问题。[28]前引[22],稻垣悠一书,第207页。
其次,关于产品流通后的过失而引发问题的案件包括最决平成二十四年(2012年)2月8日刑集66卷4号第200页;[29]认识到了轮毂强度不足却没有实施召回的两名汽车制造公司的品质保证责任人被认定为业务上过失致死伤罪的罪责的事件。最决平成二十年(2008年)3月3日刑集62卷4号第567页;[30]身为厚生劳动省药物局生物制剂课课长的被告人在面对血液制剂召回时没有行使监督权,被认定为业务上过失致死罪的事件。东京地判平成二十二年(2010年)5月1日判TA1328号第241页[31]明知由于瓦斯热水器的不当改造引起了死伤事故,却没有采取检修召回措施,被认定为成立业务上过失致死伤罪的事件。等。这一情形中的问题在于,为什么以及在何种情况下会产生召回等义务?[32]例如,[日]冈部雅人:《刑事制造物责任中的召回义务的发生根据》,载《刑事法ジャーナル》第37号(2013年)。在参考德国法的基础上,日本学界对这一问题展开了激烈的讨论。[33]详细情况参考[日]岩间康夫:《制造物责任与不作为犯论》,成文堂2010年版,第10页;[日]岩间康夫:《刑事制造物责任的诸论点》,载《刑事法ジャーナル》第37号(2013年)。于是,在特别考虑到产品流通后的过失问题的情况下,以事故原因已经被特定为前提,日本最高裁判所指出,在相关风险因素在何种程度具有认识可能性成为问题时,在此基础上,为了让怠于召回这一不作为承担责任,因为被告人是具有保障人地位的人是必要的,因此需讨论是否存在具有相关地位的特殊事由,具体包括危险的重大性、信息的不对等性、权限的优先性等的有无。[34][日]古川伸彦:《关于相对而言最近的刑事审判中的制造物责任与过失的认定》,载《刑事法ジャーナル》第37号(2013年)。
在自动驾驶汽车的情况下,作为制造、销售阶段的责任,有可能成立以程序错误、制造时的错误、错误零部件的组装、自动驾驶汽车的过早上市、不安全及缺陷产品的销售、不进行试验或品质控制、疏忽指示警告义务等为原因的责任问题。[35]参见Lohmann,前引⑥,S.197.例如,渡部提到的“自动驾驶”一词给驾驶员带来的错误印象,是否可以作为一种指示警告问题呢?与之相对,在产品流通后,则有可能产生召回及修理、不警告等责任问题。
自动驾驶汽车总是存在抽象风险,而解释清楚事故原因向来是个难题,[36]参考[日]富川雅满:《Robot und Recht系列论文介绍(1)—2:EricHilgendorf“法与自律型机械:问题概述”》,载《千叶大学法学论集》第31卷第2号(2016年)。即使解释清楚了,可以说能够明确地意识到该风险因素的情形也不多。因此,在这种意义上,认可责任的情况也不多。但是,高川雅满提到的“如果遇到这样的情况,就要使其作出这样的动作”,似乎是肯定了软件编程阶段的预见可能性,在自动驾驶中安装了应对所有情形的软件的情况下,由于结果会给人的生命、身体造成损害的情形也被考虑在内了,因此很有可能将肯定该情形的预见可能性。[37]相反,如果是不能应对有可能发生的事件的程序,那么这个程序本身可能就有问题。此外,一旦发生事故后,在此之前抽象的、难以具体说明的风险就会变得具体化,要求采取一定应对义务的情形或许也会因此增加,但是在这种情形下必须采取怎样的措施则未必明确。例如,驾驶员在驾驶自动驾驶汽车途中由于心脏停搏而陷入昏睡状态的情况下,驾驶员的脚通常会离开加速踏板,汽车也会因此减速,并在道路拐弯的地方偏离道路从而停车,但是如果该车同时使用了车道居中功能和ACC,那么该车将高速地通过道路,最终可能导致驾驶员受伤。[38]这个事例受到了Eric Hilgendorf教授的启发。这都是自动驾驶汽车得到广泛使用后有可能发生的现象。如果是首次发生的事故,那么可以否定其预见可能性,但在第二次之后,认为其存在预见可能性是无可厚非的。因此这里的问题在于,虽然在首次事故后需要采取一些对应措施,但是难以判断应当采取何种措施(是应当要求停止销售、增加对驾驶员身心监视功能,还是仅警告就可以呢)。[39]由于软件的瑕疵,仅是产生了不会导致问题却可以被认识到的很小的危险并不会发生召回义务,且在与通常不同的投入领域中有一次很小的危险变得明确了也不会产生召回义务。
Lohmann指出,全自动驾驶的汽车基本不存在介入义务的余地。[40]但在Lohmann,前引⑥,S.203中提到,可以设想面向高速公路的自动驾驶功能,在进入停车场时需要进行切换的情形。于是,使用者是否进行了介入与安全行驶之间不存在关系;使用者没有必要注视系统运作情况,可以同时做其他事情。[41]Lohmann,前引⑥,S.204.因此,全自动驾驶的汽车与高度自动驾驶汽车的情况一样,甚至是比其更容易否定使用者的行为能力。[42]Lohmann,前引⑥,S.205.于是,随着自动驾驶等级的提升,驾驶员和使用者的责任范围将不断缩小,但在实务上,刑事产品责任法则有可能具有重要意义。[43]Lohmann,前引⑥,S.209.
(二)电车难题
对于应当如何思考电车难题乃至生命法益陷于两难状况的问题,日本和德国向来有争议。
在德国,这被称之为“转辙员事件”:[44]Hans Welzel,Zum Notstandsproblem,ZSt W 63(1951)S.51.在铁道上有辆失控的电车疾驰而来,再这样下去的话在铁道上的五个人将来不及逃离而被撞死。看到这一情况的转辙员甲为了救这五个人的性命而改变了电车的轨道,但也因此导致在该铁道上的乙被电车碾压而亡。甲认为,乙的死亡是不得已而为之的。也就是说,在铁道上的五个人抑或者是乙的死亡无法避免的情况下,甲为了救五个人而牺牲了一个人的生命。对于甲的这一行为,应当作为杀人罪进行处罚呢,还是说可能成立紧急避险呢?在德国的所谓DV反击杀人案件中,DV受害人为了救自己和女儿们的生命而侵害DV加害人生命的行为不构成合法化的紧急避险(德国刑法第34条)。[45]BGHSt48,244.而这里的问题在于,是否构成免责的紧急避险。免责的紧急避险虽然在生命之间对立的情况下也能成立,但是在转辙员事件中,转辙员是为了救第三者的生命而侵害第三者的生命,而德国刑法第35条第1款仅承认“为避免自己或自己之近亲或其他密切关系者所遭遇之该等危险”的行为构成免责的紧急避险,因此该案件也不构成免责的紧急避险。其原因在于,德国不允许进行生命之间的比较衡量。
对此,Engländer提出了超法规的免责的紧急避险,主张只要满足损害最小化即可。[46]Armin Engländer,Das selbstfahrende Kraftzeug und die Bewältigung dilemmatscher Situationen,ZIS9/2016,S.610.根据该观点,为了救五个人的生命而牺牲一个人的生命的情形,通过适用超法规的免责的紧急避险,甲可以不承担杀人罪的罪责。
在日本,生命之间的比较衡量基本上是不被允许的,但有力说也认可生命之间的比较衡量。[47][日]西田典之:《刑法总论》,弘文堂2010年版,第143页。这样看来,在转辙员事件中,为了救五个人的生命而牺牲一个人的生命,是可以成立日本法上的紧急避险的。[48][日]深町晋也:《机器人、AI与刑事责任》,载[日]弥永真生、宍戸常寿编:《机器人、AI与法》,有斐阁2018年版,第226页。
(三)中国刑法的适用问题
在中国,对车辆生产商能否适用交通肇事罪向来颇有争议。有学者主张,对于交通肇事责任主体的判定,需要结合实际情况方能作出结论,等级4所规定的全自动驾驶系统出现事故,由于并不存在适格的责任主体,因此并不构成交通肇事罪。[49]陈禹衡:《自动驾驶系统交通肇事的刑事责任分析》,载《淮阴工学院学报》2018年第2期。所以,当自动驾驶车辆生产商需要承担监督责任时,不应以交通肇事罪定罪量刑,而应以刑法第146条规定的生产不符合安全标准的产品罪定罪处罚。此外,根据刑法第150条的规定,单位当然可以构成生产不符合安全标准的产品罪。[50]程龙:《自动驾驶车辆交通肇事的刑法规制》,载《学术交流》2018年第4期。但是,反对该立场的人指出,《关于审理交通肇事刑事案件具体应用法律若干问题的解释》第7条规定,单位主管人员、机动车辆所有人或者承包人指使、强令他人违章驾驶造成重大交通事故的,以交通肇事罪定罪处罚。由此可知,除驾驶员之外,这些“可以对交通工具安全行驶施加影响的人”也可以成为交通肇事罪的主体。若承认自动驾驶系统的驾驶员地位,从某种意义上说能对自动驾驶系统施加影响或控制的人是自动驾驶汽车的制造者、平台运营商。[51]黄波:《自动驾驶汽车交通肇事的刑法应对》,载《天府新论》2018年第4期。
五、自律性与不可预测性
(一)自律性问题
1.问题所在
除前述自动驾驶汽车有关问题之外,与机器人法整体相关的还有自动驾驶汽车的自律性和突发性这一特征。机器人可以通过其内部状态的变化来改善一系列指示,而且可以没有外部刺激地改变这些特征。因此,它们可以在没有任何人类的直接干涉通过其自身行动来施加控制,从而成功的处理它们的任务。[52]“Robots can improve the set of instructions through which their inner states change,and transform such properties without external stimuli:therefore,they can deal successfully with their tasks by exerting control over their own actions without any direct intervention by humans.”Ugo Pagallo,Law of Robots,2013,P.3.即使购买同种类型的自动驾驶汽车,通过其自身与周围环境中生长的生物的相互作用而取得的知识或技能,也能在很短的时间内作出差异很大的动作。[53]“Consider the same model of AI vehicle we are planning to buy next Christmas:By gaining knowledge or skills from their own interactions with the living beings inhabiting the surrounding environment,the same model of AI chauffeur will behave quite differently after only a few days or weeks.”Ugo Pagallo,ibid.,P.72.于是,自动学习的结果可能会产生诸如对某种状况作出的最合适的判断却不适用于其他情况的问题,具体可参考下述案例。
设计人员将自动驾驶汽车设计为具备自动学习功能,为了可以作出最妥当的应对而根据行驶经验自动学习,制造者制造了根据这样设计的自动驾驶汽车。使用者在1年内一直让该自动驾驶汽车只在行驶车辆非常多的道路上行驶。在这样的情况下,如果从左边突然冲出来人的话,采取紧急刹车容易将事故的损失最小化。此后,使用者让该自动驾驶汽车在周围没有任何人的道路上行驶,当被害人从左边突然冲出时,该自动驾驶汽车根据自动学习功能的自律判断,采取了紧急刹车,结果撞到了被害人,使被害人受伤;如果立即向右打方向盘的话,那么被害人就可以得救。这种情况下的问题提出了疑难案件(hardcase)问题,是比上述问题更加难的问题。但下述程度的内容还是可以探讨的。
富川雅满提出了虽短但颇有意思的问题,对于因故意引起不法结果的可以追究刑事责任,而问题是由于过失给物和人造成损失的情形,当如何处理?因错误操作导致损害发生时,本来就难以判断是硬件制造的问题,还是编程的问题;是使用者的不当使用,还是自律型机械的自我学习,抑或是各种要素综合作用的结果,从而难以证明因果关系。此外,对于寄以通过消除人工错误从而减少事故期待的自动驾驶系统的事故,使用者没有预见可能性,或仅有非常低的畏惧感(危机感)。因此,过失犯成立的范围会非常有限。而关于制造者,他认为(例如,在两侧有人的情况下,为了避免正面冲突,而程序向左或向右的某一侧打方向盘的情形下)存在认可预见可能性的可能性,这种情况下也可以考虑紧急避险或被允许的危险法理,在自动驾驶系统的导入被积极评价的现状下,建议展开运用该法理的理论。[54]前引[36],富川雅满文。
2.因果关系的问题
首先,自律性和突发性让因果关系的证明变难,即关于机械学习的结果所作出的“判断”,存在很难明确说明其为什么作出该判断的情形,即使可以考虑是程序的错误、发生事故时输入信息的错误、在某个阶段学习了错误的信息等各种各样的原因,但很难找出其最终原因。如上文所述,由于存在各种相关人员,因此很有可能不能明确是哪一方相关人员的过失导致了事故。虽然没有自律性和突发性也有可能存在这个问题,但可以说由于存在自律性和突发性,进一步加大了事后查明的困难性。
在这种情况下,不能否认可能会作出由于不能认定因果关系而不能认定任何人的责任的判断。但是,如果总是出现这样的结论,有可能成为上述意义上的过小责任。
因此,这里需要其他理论,比如使用过失共同正犯理论的观点,[55]参见日本最高裁判决1953年1月23日刑集第7卷1号第30页。认为是多个相关人员的共同过失导致了事故发生,克服了由于这种因果关系的证明困难所导致的过小责任问题。但这当然必须是刑法解释论可以允许的范围内的内容,不能为了追求结论的正当性而超出了刑法解释论的范围。
根据最高人民法院《关于审理交通肇事刑事案件具体应用法律若干问题的解释》(2000年11月10日),即使行为人实施了违反交通运输管理法规的行为,并因此发生了重大交通事故,也不是就一概以交通肇事罪论处,还要看行为人所负责任的大小,例如是主要责任还是全部责任,在上述1级、2级、3级驾驶状态下,驾驶员可以对交通工具进行一定的控制,在技术上不能查明事故发生的主要原因时,难以分清驾驶员是否应对交通事故负主要责任。
3.预见可能性的问题
自律性和突发性对预见可能性也有很大的作用,即越是要求具体的预见可能性,就越容易以自动驾驶汽车的自律性和突发性[即机械(中安装的人工智能)作出的判断]为由来否定预见可能性;相反,如果只是抽象理解预见可能性的话,则又会容易肯定预见可能性,自动驾驶汽车相关人员的责任也因此会加重。在上述机械学习导致的事故案例中,对制造者等而言,机械通过学习功能自动学习,结果作出了与当初相差很大的行为时,可以认为这样的事故是抽象的。但这样的事故是稀少案例,如果这些事故没有具体地、真实地发生,是很难进行预测的。因此,仅有“或许由于自律性和突发性而作出与当初相差很大的行为”这种程度的认识,就肯定制造者等抽象的预见可能性,进而有可能让制造者等对事实上发生的事故承担结果责任。以这个层面上来说,这是一个非常难的问题。
如上文所述,关于这一点或许可以适用被允许的危险的法理,即由于自律性和突发性(这种情况下,特别是自动学习)使得行驶最适化,如果该社会优点足够大的话,其导致的在例外情况下的危险作为被允许的危险而被允许。当然,仅因存在自律性和突发性就谁都可以不负责任的话,那么就可能发生社会安全性(交通事故的预防)问题,在一定条件下应该让谁(可以认为如果使用者没有错误使用的话,那么自然就是设计人员或制造者)来承担责任。但如果可以很容易地满足该要件的话,则可以进行自主学习判断的自动驾驶汽车的开发和销售会消失,对新技术产生萎缩效果。因此,应考虑自律性和突发性给社会带来的优点的程度等因素,对于某种危险是否是值得被称为“被允许的风险”,应进行连接学界与业界、实务界与理论界的研究。而且,具有自律性和突发性的自动驾驶汽车可以进一步减少事故等,提高了社会便利性,因此应促进具有自律性和突发性的自动驾驶汽车,则应探讨上述的安全港的立法。
4.预防指示与让驾驶员预防事故的措施
此外,一部分学者将此作为预防指示的问题,认为制造者等应向使用者等警示自动学习可能产生各种各种的危险。[56]Jan-Philipp Günther,Roboter und Rechtliche Verantwortung:Eine Untersuchung der Benutzer-und Herstellerhaftung,Herbert UtzVerlag,München2016,S.224.但是,作出了警示,仍存在使用者等,特别是等级4的使用者等能做什么的问题。这意味着,仅抽象地指出“会存在由于自动学习导致的发生不能预测的行为”的情况,很难因此就认为可以完全免除制造者承担自律性和突发性所致结果之责任。并且,只要问题的本质仍然是因自律性和突发性所导致的行为产生的“不能预测性”,就不可能具体地指出会发生怎样的行为。此外的问题是,作为第三方的被害人没有收到警示,由于第三方被害人的原因,也很难使警示成为免责事由。这意味着作为警示问题来处理未必是妥当的。
深町晋也认为,在控制权困境的语境下,存在这样的问题:对于等级3以上无须自己操纵驾驶的驾驶员,是否应当期待其负有与自己驾驶汽车相同程度的前方注视义务。因此,深町晋也认为,如果本身就对无须自己驾驶的汽车课以注意义务,则在等级3的自动驾驶汽车的用户界面之中设计并安装促使驾驶员对自己驾驶的汽车履行一定的前方注视义务的装置就非常重要,如果没有这样的设计,由于设计并销售诱发汽车驾驶过失的自动驾驶汽车,汽车厂商的责任人等可能构成过失责任。[57]前引[48],深町晋也文,第215页。
5.标准
为了免于刑事责任,汽车厂商应当如何采取安全措施是个难题。对此,我们可以从贝克(Beck)所强调的规格及标准所发挥的作用中得到些许启示,即业界团体以及协会等应当尽可能地制定标准。[58][德]Susanne Beck:《机器人工学与法》,[日]只木诚监译、富川雅满译,载日本《比较法杂志》第50卷2号。
在自动驾驶汽车的驾驶员这一方面,如果存在行业统一的最低技术标准与规范、法律法规的相关规定,那就以此作为重要参考;如果还不存在这样的标准,那么驾驶员就应履行更为高度的注意义务,而强调尽快出台我国的自动驾驶安全标准。[59]杨剑锋:《结果无价值型过失论在汽车自动驾驶时代的展开——以交通肇事罪为切入点》,载《法大研究生》2017年第1期。
(二)控制权困境与过小和过大归责
1.风险分担的问题
以上简单地探讨了使用者等、制造者等的过失刑事责任,而在此将控制权困境的问题狭义地作为使用者等的责任问题是不太妥当的,即控制权困境的背景中存在以下问题:对于被认为虽存在新的、不确定的风险但其带来的便利性也超过了一定程度的技术,技术使用方、技术提供方及潜在被害方三者之间应该分担何种程度的风险呢?
在上述情况下,如果没有达到风险分担最适化,则有可能产生以下问题:若发生过大范围归责的情况,则有可能导致提供方不提供具有便利性的技术,使用方不使用具有便利性的技术,具体在自动驾驶汽车的情形下,则有可能优秀的程序人员、技术人员等因担心责任而不从事自动驾驶汽车的研发,从而阻碍自动驾驶汽车的开发和流通;此外,通过购买使用自动驾驶汽车可以享受便利性的人也可能不购买使用了。特别是,如果期待通过自动驾驶汽车消除人工错误从而减少事故的发生的话,即使减少了自动驾驶汽车的事故,但也不会减少以往汽车的事故,这是否是社会最适化,仍有质疑的余地。
但是也不能因此就认为归责越少越好。也就是说,即使是安全性能多少有些欠缺的自动驾驶汽车,对于向市场投入和使用,如果没有实际上被追究责任(至少是刑事责任)的风险,那么不能否认会出现安全性能低的自动驾驶汽车导致的事故多发,以及由此导致的法益侵害增大的危险。这对潜在的被害人来说是不正当的结果。正因如此,需要考虑的既不是过大责任也不是过小责任的最适归责标准的相关风险分担。
2.为促进自动驾驶汽车的开发和使用
然而,即使存在被允许的危险的法理,但仍有其界限。这终归只是刑法的“解释”论,在具体案件中什么范围内的行为被认为是被允许的危险,最终仅由法院来判断。
的确,法院也会根据被害人的观点来考虑最终的、最合适的风险分担的法律适用,这个层面上的被允许的危险法理的确具有灵活性以及可以得出妥当结论等优点。然而这真的与促进自动驾驶汽车的开发和使用相关吗?这仍有些许疑问。即如果不到法院这一步,就最终不清楚如果做/不做什么就会被追究责任的话,这也会产生萎缩效果。
因此,如果在政策上作出了应促进自动驾驶汽车的开发和使用的判断的话,那就可以考虑在立法上规定所谓的安全港等。比如,可以考虑对于取得形式认定符合技术标准的自动驾驶汽车,因该功能正常运转的结果导致的事故,制造者等不承担责任,或者取得了等级4的形式认定且符合技术标准的自动驾驶汽车的使用者等不承担维修保养之外的责任,由此导致的潜在受害者的利害也当然成为问题,但如果要在刑法上支持上述政策的实现的话,最好是有这样的安全港立法。
3.风险分担的工具
为了实现这种风险分担的最适化,刑法解释论上存在各种各样的工具。但是,在自动驾驶汽车的情形下,基本上没有太大用处的工具也很多。例如,预见可能性及结果回避可能性在一定情形下有可能有效发挥作用,但总存在抽象的风险,最终存在不卖、不乘坐的结果回避方法的像自动驾驶汽车这样的存在风险的新技术,预见到了何种范围的具体的风险的话,就存在预见可能性,采取了何种范围的应对才可以排除结果回避可能性,这种判断并非容易。
与此相对,也有在一定情形下有用,但在其他情形下没有用的工具。例如,关于由于不遵守道路交通规则的被害人的行为导致信赖被害人遵守道路交通规则而发生事故的自动驾驶汽车的相关人员(制造者等和使用者等)的责任的限定,有可能可以使用信赖原则,[60]例如日本最高裁判决1966年12月20日刑集第20卷10号第1212页中的事例,就算是自动驾驶汽车也会被作出同样的判断。但这不特定于“自动驾驶”汽车。又如,被害人是使用者等的,在知道是存在风险的自动驾驶汽车的基础上购买、使用等的,有可能可以使用危险的承受理论,但在被害人是第三人的情形下则又很难探讨适用。[61]Günther,前引[56],S.224.
(三)适用信赖原则的可能性
今井猛嘉提出了对自动驾驶技术的信赖原则的适用可能性,[62][日]今井猛嘉:《围绕自动化驾驶的法的诸问题(特集 自动驾驶)》,载《IATSSreview》第40卷第2号。而信赖原则被认为,仅在可以信任被害人或第三人的适当行为时方可成立。[63]例如参考[日]西原春夫:《交通事故与信赖的原则》,成文堂1969年版,第14页。因此,不能轻易认可对“机械的适当行为”[64]关于机械到底能不能实行行为,参考前述Hilgendorf与Joerden等人之间的争论。的信赖,在一般现行法律解释的范围内,应依旧如中川由贺所指出的那样“不能以信赖系统为由来免除驾驶员刑事上的责任”。但在将来,如果社会达成一致认为可以信赖机械进行妥当行为的话,也有可能将信赖原则扩大到对机械的信赖。[65]参见前引[15],中川由贺文。深町晋也也说到,在信赖自动驾驶系统的妥当运转,但是其却没有妥当运转的情况下,如果能够信赖汽车厂商设计并制造了妥当运转的AI时,根据信赖原则,行为人不承担责任。[66]前引[48],深町晋也文,第215页。
(四)被允许的危险
被认为有用性较高的是被允许的危险的法理。[67]参见前引[58],Beck文,第95页;Günther,前引[56],S.228;Hilgendorf,前引⑧等。
Hilgendorf以“使用了自动停车系统,但因传感器污浊没有注意到儿童而撞到儿童”的情形为例,认为不管是何种责任,在自动驾驶汽车的情形下的注意义务的讨论与其他领域并无不同,法益侵害可能性和回避可能性奠定了注意义务的基础,通过被允许的危险(在道路交通中非常重要)和信赖原则进行限制。此外,因系统被黑而引起事故时,可以追究将安全性能低的系统搭载在车辆上的责任。于是,他认为在对这些新问题的回答中,被允许的危险的概念具有重要的作用。[68]Eric Hilgendorf,Automatisiertes Fahrenund Recht Deutscher Verkehrsgerichtstag(53.,2015,Goslar),Veröffentlichung der auf dem53.Deutschen Verkehrsgerichtstag vom 28.bis30.Januar2015in Goslar gehaltenen Vorträge,Referate und erarbeiteten Empfehlungen,Köln 2015,SS.55-72;Eric Hilgendorf,Teilautonome Fahrzeuge:Verfassungsrechtliche Vorgabe und rechtspolitische Herausforderungen.还可以参考Eric Hilgendorf,Automatisiertes Fahren und das Recht Zeitschrift für Verkehrsrecht(ZVR),Sonderheft,Dezember 2015,SS.469-472.
Beck认为有必要通过社会相当性或被允许的危险进行限定,如果事先没有明确已进行了充分的限定,存在机器人的开发、利用发生萎缩的风险。[69]前引[58],Beck文,第95页。
根据自动驾驶汽车给社会便利性带来的增大程度,判断在何种范围内是被允许的风险。例如,上文的因心脏病导致的事故案例中,自动驾驶汽车的技术以及安全性达到了“或许在例外的情况下给人带来伤害,在极端的情况下剥夺生命,但减少了人工错误,救了数千或数万人的性命”的程度的话,例如,即使发生了1次事故(虽然或许会被认为此后应进行警告的程度),按照被允许的危险,有可能可以判断这样的风险不需要做到召回等。
(五)减少因过小归责导致的对潜在被害人的不利的方法——数码人(Digital Person)
如上所述,特别是由于自律性和突发性带来的因果关系证明的困难性等,持有自律性和突发性的自动驾驶汽车,从结果上说发生过小归责这一潜在危险较高。如上文所述,这会导致给潜在被害人带来不利后果。
作为这种状况的解决方案,提出了数码人的概念。如上文所述,尽管已存在是否可以让或者应该让自动驾驶汽车及机器人承担责任的讨论,但还有一种值得探讨的观点,就是在一定程度上限定使用者等和制造者等的责任,同时通过惩罚数码人从而减少谁都无法被处罚的情况。然而朝着这个方向探讨的话,需要考虑如何对应伊藤指出的如下观点:通过对机器人的制裁来承认这些自然人负有过失或者负有无法举证因果关系的法律责任。
但是有几个批判,其中核心论点来自机器人刑法所主张的自由意志。引用增田丰的观点指出,至少在目前,我们人类和机器人之间的主观交流和探讨的基础尚不存在。[70][日]增田丰:《基于规范论的责任刑法的重构——认识论的自由意志论与批判的责任论的项目》,劲草书房2009年版,第477 478页。因此,在自然人状态下,承认将自由意志予以拟制,这一理论原封不动地导入机器人领域,尚不可行。[71]参见储陈城:《人工智能时代刑法归责的走向——以过失的归责间隙为中心的讨论》,载《东方法学》2018年第3期。关于中国机器人刑事主体问题,参见马治国、田小楚:《论人工智能体刑法适用之可能性》,载《华中科技大学学报》(社会科学版)2018年第2期。至少从目前的状况来看,将自动驾驶汽车作为刑事责任的主体是非常困难的。[72]参见江溯:《自动驾驶汽车对法律的挑战》,载《中国法律评论》2018年第2期。在中国,也有学者提倡考虑在刑法中专门增设“重大人工智能事故罪”,以规范无人驾驶汽车的研发制造环节。[73]参见蔡婷婷:《人工智能环境下刑法的完善及适用——以智能机器人和无人驾驶汽车为切入点》,载《犯罪研究》2018年第2期。
六、结 语
本文以自动驾驶汽车这一今后在公路上使用且很有可能成为我们代步工具的机器人技术为例,对到目前为止未有太多研究的刑事责任进行了初步探讨。自动驾驶汽车的刑法相关问题与机器人的刑法相关问题并非一定一致,但一定是自动驾驶汽车的问题相对来说更加特定且具体。本文通过探讨自动驾驶汽车的刑法以及机器人的刑法中被允许的危险的概念的重要性以及对自律性和突发性的影响,从而引起相关讨论,旨在抛砖引玉。若以本文为契机,机器人法特别是刑法领域的研究变得更加丰富的话,作者将深感荣幸。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年4期)2022-03-07
海峡姐妹(2020年12期)2021-01-18
人大建设(2018年4期)2018-06-26
好日子(2018年5期)2018-05-30
时代英语·高二(2017年4期)2017-08-11
中国新闻周刊(2016年33期)2016-10-27
公民与法治(2016年4期)2016-05-17
连环画报(2015年12期)2016-01-14
浙江中西医结合杂志(2013年8期)2013-01-22
