新型卷缩仪控制系统设计与Petri网建模
2019-02-25 13:16万军,徐驰
计算机技术与发展 2019年2期
万 军,徐 驰
(常州大学,江苏 常州 213164)
0 引 言
变形丝是普通长丝通过变形加工技术而成,特点是具有较大的伸缩性。这种伸缩性是由变形丝的卷曲形态造成的。变形丝的卷曲特性直接关系到变形丝的性能以及纺织制品的特点。卷缩仪用于测定变形丝的卷曲收缩率、卷曲模量、卷曲稳定度等拉伸性能物理指标[1]。现有的卷缩仪大都采用“单片机+PC机”控制结构,单片机控制具体的试验过程,系统参数设置和试验数据处理往往由PC机实现,因而结构复杂,成本较高。随着嵌入式技术的发展,采用单一ARM处理器即可有效满足卷缩仪控制功能。但卷缩仪测试流程复杂,系统运行时存在着脉冲检测、串口通信、电机驱动等多个并发动作,为了提高控制的可靠性,采用形式化建模方法十分必要。
Petri网是一类重要的建模和分析工具,可以描述和分析并发、冲突、异步以及竞争等系统特性,在制造业和嵌入式系统等许多领域都得到了广泛的应用。文献[2]根据站间闭塞系统的高可靠性需求,设计了基于ARM的嵌入式站间自动闭塞系统控制器及切换方法,并采用Petri网方法对系统进行了建模与分析,验证了由控制器组成的系统的状态转换的安全性与完整性。针对工业生产中常规的电加热炉温度控制的强非线性及大惯性等特性,文献[3]应用混杂控制系统的思想,设计了基于Petri网的电加热炉温度控制系统,实现了电加热炉温度控制的快速性和稳定性。文献[4]采用赋时Petri网为全自动医学检验分析仪的控制系统建模,解决了控制系统中的冲突、死锁等问题。文献[5]建立了基于有色Petri网的电梯门系统模型,分析了模型的回归性、有界性、活性及公平性,验证表明了电梯门系统的安全性。针对普通Petri网不易与外部事件同步的特点,文献[6-9]在库所变迁网的基础上,提出了用于数字控制器建模的输入输出库所变迁网,从而较好地实现了Petri网控制器的外部接口。文献[10-11]针对传统PLC编程方法无法满足诸如协调控制、竞争控制等复杂工业控制的要求,探讨了Petri网控制模型的建立方法以及Petri网模型与梯形图的转换关系,分别实现了分步压装药控制程序和钢瓶生产线控制系统。
自控网系统又称自修正系统,与P/T系统的区别仅仅在于弧上的权受库所控制,从而能更清楚地表现系统参数受系统状态的影响。自控网系统是非线性的,因此具有更强的系统建模能力[12]。文中遵循合成纤维变形丝卷缩性能试验方法,设计了一种以树莓派为核心的新型卷缩仪控制系统,采用文献[13]中提出的广义同步自控网系统,实现了控制系统的建模与分析。
1 测试原理与硬件设计
卷缩仪测试原理为将若干个绞丝试样悬挂于圆桶式样品架的挂钩处,然后将样品架置于卷缩仪的抽屉内,按照标准,在不同负荷状态下,测量绞丝的拉伸长度。每个试样拉伸结束后,根据记录的数据进行计算,得出该试样的卷曲收缩、卷曲模量和卷曲稳定度等指标数据并保存,然后进行下一个试样测试,直至样品架上所有试样测试完毕。卷缩仪系统结构示意如图1所示。
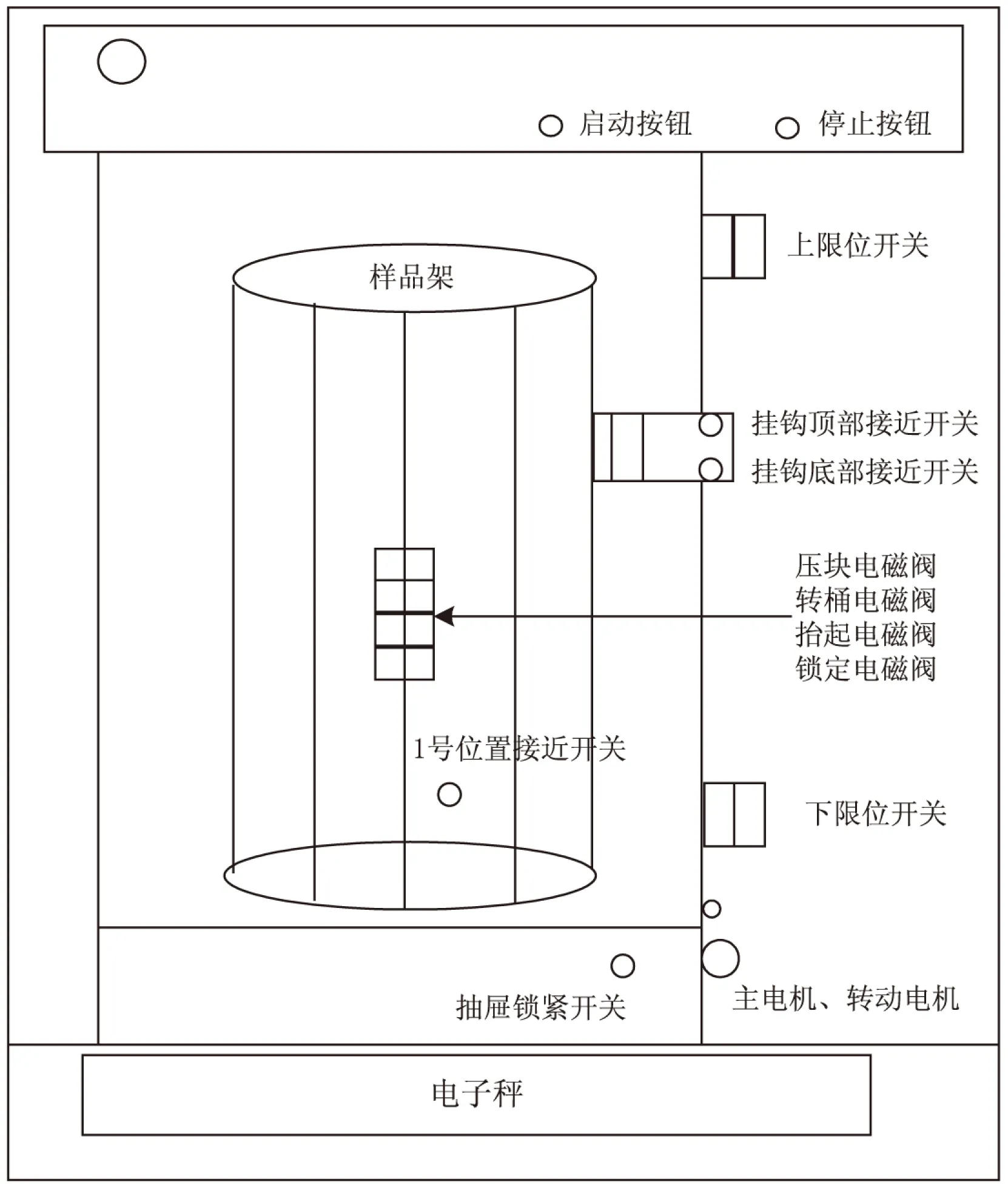
图1 卷缩仪结构
新型卷缩仪控制系统的硬件组成包括样品架转动模块、拉伸驱动模块、测力模块、测长模块和人机接口模块。各模块由同一主控制器协调工作。
(1)样品架转动模块。样品架上的不同位置处待测试绞丝均需通过转动电机控制样品架旋转到达指定测试位方可开始测试。转动电机采用单相永磁同步电机,由继电器控制启停。
(2)拉伸驱动模块。控制系统采用交流伺服电机实现试验绞丝的拉伸。卷缩仪试验架上下端各有一排挂钩,上端挂钩固定在框架上,下端挂钩不固定,试验绞丝挂在上端和下端挂钩之间。采用交流伺服驱动器来控制交流伺服电机转动控制链条带动压块向上向下运动,当压块向下运动时,压块气缸伸出,对下端挂钩加力。系统主控制器提供PWM信号和方向电平信号给驱动器,PWM信号频率与电机的转速成正比,方向信号决定电机的旋转方向。
(3)测力模块。施力数据的测量采用电子秤。气缸机构把样品架抬起受力在电子秤上,对绞丝的拉力反应到电子秤上,去掉皮重即为加力的大小。电子秤通过RS232C与主控制器通讯。
(4)测长模块。主控制器测量电机编码器发出的脉冲数,根据电机驱动器所设定的电子齿轮比,计算出绞丝拉伸的长度。
(5)人机接口模块。由触摸屏和打印机组成。其中,触摸屏采用I2C接口,用于实现系统参数的设定以及测试数据的显示。打印机采用USB接口,实现每次试验后数据报表的打印。
(6)主控制平台。采用Raspberry Pi作为主控制平台,该平台构建在ARM处理器上,内嵌基于Debian的Linux操作系统,有着丰富的开源软件资源[14],内部具有PWM、USART和USB设备接口,体积小、功能强大,可以满足系统控制需求。树莓派与各模块硬件连线图如图2所示。系统中的开关量输入输出信号均由树莓派的IO口控制,输出信号由74HC273锁存,输入时信号由74HC244缓存。

图2 树莓派与各模块硬件连线图
2 Petri网建模与分析
2.1 广义同步自控网系统
以下介绍广义同步自控网系统的基本概念,其详细内容可以参见文献[13]。
定义1:六元组Σ=(P,T;F,K,W,M)构成广义自控网系统的条件是:
(a)N=(P,T;F)构成有向网,称为Σ的基网。
(b)K={KL,KH}称为N上的容量函数;其中KL:P→R;KH:P→R。KL和KH分别称为下界容量函数和上界容量函数。∀p∈P,KL(p)KH(p),p的容量可表示为[KL(p),KH(p)]。当KL(p)、KH(p)为无穷时,容量的闭区间变成开区间。
(c)W:F→R∪Exp(P)为权函数;其中Exp(P)是P元素的函数表达式集。
(d)M:P→R称为N的标识。Σ的初始标识记为M0。
广义自控网系统状态方程可写成文献[15]中给出的自控网系统的状态方程形式:
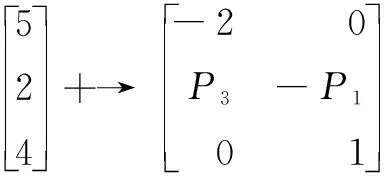
M'=M0+→C·U
(1)
其中,矩阵运算符“+→”表替换加;C为Σ的关联矩阵;U为Σ的并发步序列U1U2…Uk的矩阵表示。
定义2:三元组(Σ,Ε,G)构成广义同步自控网系统的条件是:
(a)Σ=(P,T;F,K,W,M0)是一个广义自控网系统。
(b)G:T→E∪{ε},其中E为Σ的外部事件集,ε表示一个恒发生事件。可通过模型化简的方法来消除关联恒发生事件ε的变迁,文中仅考虑外部事件。
图3(a)示意了一个广义同步自控网系统模型,其中变迁T1和T2分别与信号x1的上升沿事件和信号x2的下降沿事件相关联。图3(b)给出了x1和x2时序及其系统标识演化情况。

(a)广义同步自控网系统模型
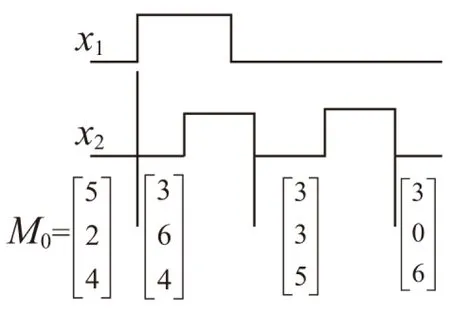
(b)标识演化
根据广义自控网系统的状态方程(1),标识计算如下:
2.2 试验流程的Petri网建模与分析
根据变形丝卷缩性能试验方法,建立图4(a)所示的卷缩仪控制系统试验流程的广义同步自控网系统模型,模型中各库所、变迁及信号解释见图4(b)。
根据试验流程,可将模型分为三个部分。
(1)样品架旋转到测试位置。在每次试验准备就绪状态下,检测到启动按键按下后,变迁T1发生,开启锁定电磁阀,等待抽屉到位信号。当抽屉锁紧开关闭合后,变迁T2发生,启动转动电机带动样品架旋转,直到收到测试位接近开关闭合信号,进入P4状态,表明待测试绞丝就位。
(2)压块运行到下挂钩位置。T4发生时,启动交流伺服电机高速正转,通过链条带动压块上升到上限位后,T5发生,电机停止,启动压块电磁阀控制压块气缸伸出,此时再启动电机高速反转。收到挂钩底部开关信号时,开始对绞丝施加规定负荷。该环节中库所P5代表了交流伺服电机的运行状态,其托肯值代表了电机转速。弧(P5,T5)和(P5,T8)为权受控弧,权值均为库所P5的标识,当变迁T5或T8发生时,P5托肯值减为0,表示电机停止运行。
(3)测试过程。进入P9状态,表明开始对绞丝进行施加负荷正式测试,此时T9发生,执行PID调节环节,直到绞丝承受规定的负荷。P10状态下变迁T10发生,表明定时器启动计时,开始对试样加载规定负荷并保持规定的时间,其中弧(T10,P11)的权值代表力保持时间,弧(T10,P12)的权值表示单次定时周期。每次定时器溢出信号到来将使能变迁T11,进入定时器中断处理,统计定时次数。若定时时间已到,库所P11托肯数为0,通过禁止弧(P11,T12)控制T12发生,完成本次测试。
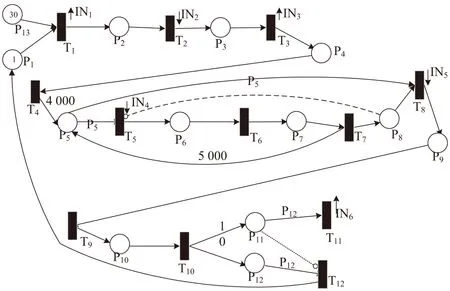
(a)试验流程的广义同步自控网系统模型
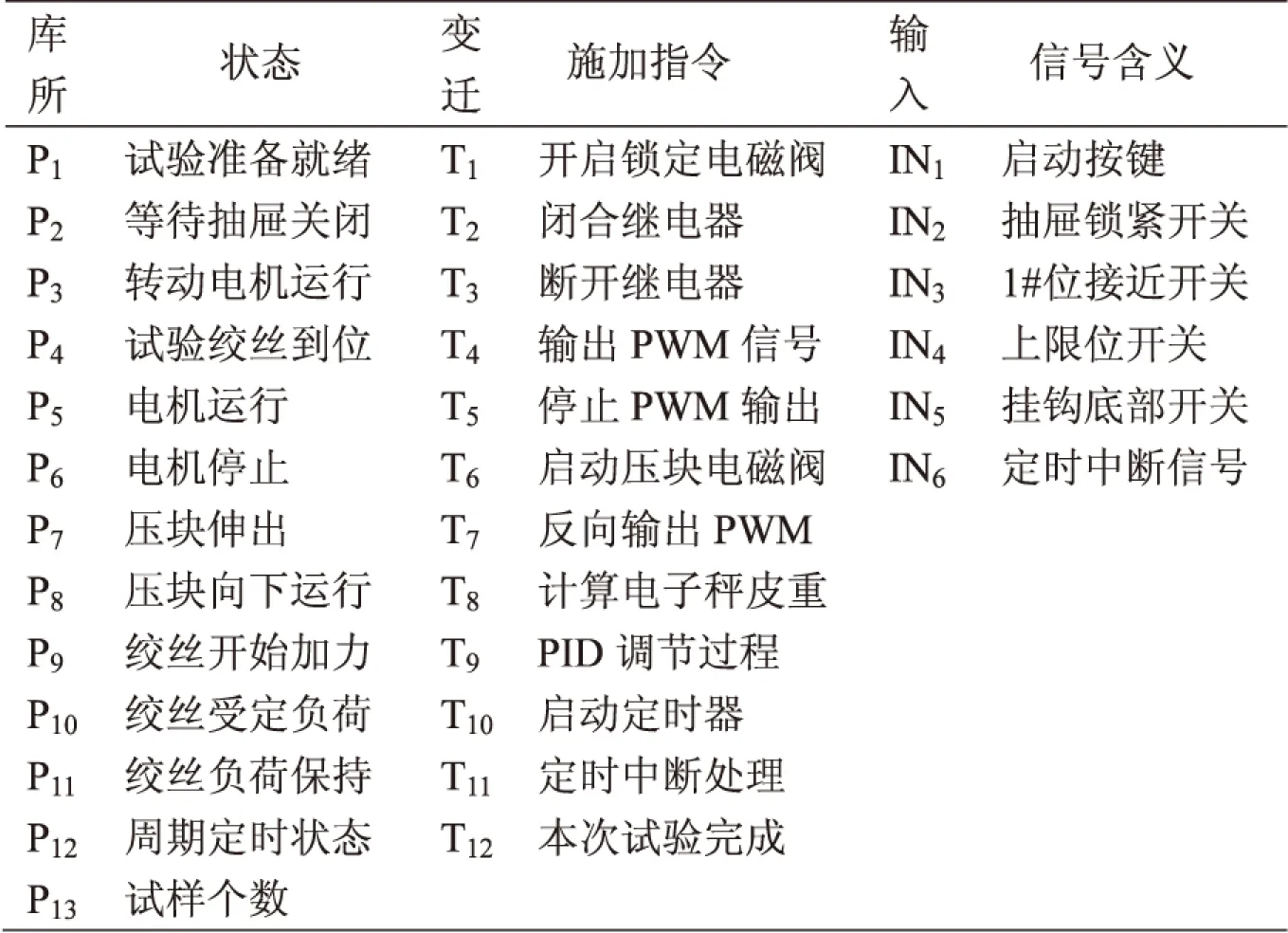
(b)库所、变迁及信号含义
依据合成纤维变形丝卷缩性能试验流程,需对每个试样进行3次不同的负荷加载并保持相应的时间后测量其拉伸长度。具体测试流程为:当压块下降到下挂钩处对试样加负荷,达到0.2 cN/dtex时保持10秒钟,测量试样长度Lg。将试样卸载负荷并保持10分钟后,测量其长度Lz,再次加载负荷到0.01 cN/dtex时保持10秒钟后测量长度Lf。再次改变负荷到规定力保持10秒钟,然后卸载负荷并持续20分钟后,测量其长度Lb。根据所测的Lg、Lz、Lf和Lb,计算可得卷曲收缩率等指标。
图4模型中仅包含了对试样施加1次负荷测试的过程,针对其他2次施加负荷并保持相应时间的情形,模型结构同图4(a),修改模型中弧(T10,P11)和(T10,P12)的权值,重复运行模型即可。
采用文献[10]开发的广义同步自控网系统建模工具GSSNTool对图4(a)模型进行仿真,可得在初始标识M0(1,0,0,0,0,0,0,0,0,0,0,0,30)下的可达标识树,通过分析可知,模型经过一系列变迁发生达到目标状态(1,0,0,0,0,0,0,0,0,0,0,0,0),正确完成了测试流程,所有变迁均是活性的,且不存在输入信号间同时有效造成的冲突。
3 试验结果
经过测试,卷缩仪控制系统的主要技术参数数据如表1所示。
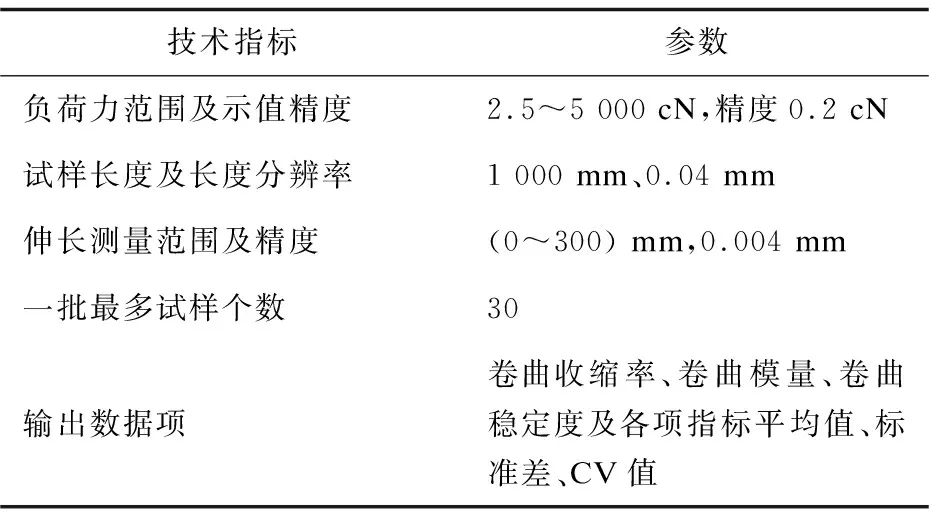
表1 控制系统技术参数
设计的新型卷缩仪符合合成纤维变形丝卷缩性能试验方法标准规定的各项性能规定,测试过程中触摸屏实时显示了每个试样拉伸过程中所测的长度、计算所得的卷曲收缩率、卷曲稳定度等指标数据,图5为一次试验的结果数据。
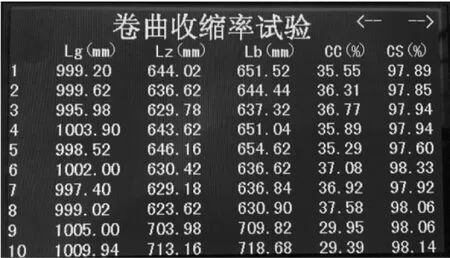
图5 试验结果显示
4 结束语
在深入分析全自动变形丝卷缩性能试验流程的基础上,设计了以树莓派为核心的新型卷缩仪控制系统,基于广义同步自控网系统,利用其变迁关联外部事件和权受控特性,对控制系统进行了Petri网建模及分析,确保了控制流程的正确性。所设计的卷缩仪经实际应用结果表明具有操作方便、性能稳定和成本低等特点,较好地满足了各类纺织和化纤企业的需求。下一步将拓展文中的工作,研究广义同步自控网系统模型到PLC代码的自动转换方法,从而针对采用PLC控制器的嵌入式系统,完整地实现基于模型的设计流程。
猜你喜欢
纺织标准与质量(2022年2期)2022-07-12
煤气与热力(2022年4期)2022-05-23
一重技术(2022年2期)2022-05-12
煤气与热力(2022年2期)2022-03-09
福州大学学报(自然科学版)(2021年6期)2021-12-31
数理化解题研究·综合版(2021年11期)2021-12-22
小学教学研究(2021年5期)2021-09-29
昆钢科技(2021年3期)2021-08-23
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
爆炸与冲击(2020年8期)2020-08-26