一种无人水下航行器智能自救系统的研制∗
2019-02-27 08:10吕志刚
舰船电子工程 2019年1期
吕志刚
(中国船舶重工集团公司第七一○研究所 宜昌 443003)
1 引言
大型水下远程无人自主航行器作为人类在海洋活动,特别是深海活动中的重要替代者和执行者,已被广泛应用于科学考察、深海作业、打捞救生等领域,其应用前景极其广泛[1]。但因其在恶劣的深海环境中作业,时常面临各种各样的未知因素,一旦遇到突发事件发生故障,自救系统将起到重要的安全保障作用。本文针对复杂海洋环境为某一在研大型水下远程无人自主航行器研制出了一套高可靠性智能自救系统。
2 智能自救系统的工作原理
自救系统其实就是AUV通过某种手段使自身在面临危险状况时能够快速上浮至水面而获救,该自救系统主要由决策中心、传感器和执行机构三大部分组成。执行机构分为控制型和独立型两种机构,控制型机构为决策中心做出决策后再通过通信总线控制机构动作,而独立型机构与AUV完全独立,即集决策与动作执行于一体的机构[3]。独立型执行机构通过深度片感知AUV当前深度,当AUV当前深度超出预先设定的深度,则该执行机构丢弃50kg压载起到一定调节作用。
智能自救系统的工作原理是:当AUV航行过程中通过传感器感知到突发事件时,如漏水、离底高度超限、深度超限、俯仰角超限及过流过压等,则AUV通过决策中心做出决策控制相应的执行机构动作:浮力水舱排水(最大可提供400kg正浮力)、水平舵机打上浮舵、应急压载释放压载(50kg)、超深压载装置释放压载(50kg)、推进电机停机,并且当AUV上浮至水面后可通过频闪灯、北斗终端装置和无线电进行示位,否则也可通过水声通信、水声定位系统进行搜寻,同时AUV释放出卫星定位装置发送北斗短信进行示位[2,4]。
3 智能自救系统的体系架构
如图1所示,AUV自救系统主要由决策中心、传感器和执行机构三大部分组成。决策中心对整个AUV的安全状况进行故障诊断和智能决策,决策中心根据传感器反馈的信息进行实时判断,如果判断出故障(漏水、深度超限、离底高度超限、过流等),则决策中心控制各执行机构(除超深抛载装置外)进行相应的动作(如浮力水舱排水、释放应急压载、打上浮舵、释放卫星定位装置和发送北斗短信等)[5~6,9]。超深抛载装置是通过自身的深度压力片进行AUV当前航行的深度进行测试,一旦发现AUV当前航行深度超限侧释放预先装好的压载,为AUV提供一定的正浮力(50kg)。

图1 自救系统组成框图
母船上工作人员也可直接通过无限电通信装置、水声通信设备和水声定位设备与自救系统进行联系,搜寻AUV当前所处的位置并可下达相应的操作指令,实施自救任务或进行打捞。
4 自救系统方案设计
4.1 决策中心
决策中心硬件采用基于CPCI总线接口标准的板卡构成高性能、可靠的嵌入式系统,主要由系统核心板、串口通信扩展板、电源板及底板构成。机箱为全封闭结构,采用整铝订制安装,无风扇设计,具有防水功能,支持5路CPCI外围卡扩展。
决策中心软件基于VxWorks实时操作系统,采用多任务程序设计。采用基于优先级的抢占式任务调度策略,任务之间采用信号量和消息队列来实现通信和同步。为了解决CPU中断时间过长的问题,外部接口中断时调用接口监测程序,接收数据到接收缓冲区,然后释放一个二值信号量来激活相应的数据解析及处理程序。
4.2 应急抛载装置
应急抛载装置要求能接受决策中心控制,实现压载可靠释放。应急抛载装置由电机驱动板、释放装置及密封壳体等组成。当决策中心感知遇到突发事件时,决策中心通过控制电源管理系统给应急抛载装置供电,应急抛载装置电机驱动板驱动电机运动,从而实现压载的释放。
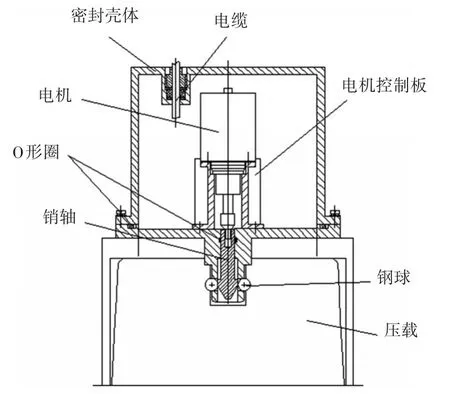
图2 应急抛载装置示意图
4.3 超深抛载装置
超深抛载装置要求独立于AUV,当操用运载平台超过设定深度时,能可靠释放压载。

图3 超深抛载装置示意图一
超深抛载装置由压力片、弹簧、释放装置及安装架等组成。水的静压和弹簧的预紧力作用在释放轴上,释放轴由压杆及压力片顶住。当达到压力片最大工作水深时,压力片在释放轴与压杆的剪切作用力下被破坏,释放轴回缩,当运动行程达到一定值时,钢球解除锁定,压载在自身重量作用下脱落,达到释放压载的目的。通过调节弹簧的长度和设计合适的压力片来设定动作水深。释放轴长度和密封壳体的高度可通过螺纹调节,二者配合实现弹簧压缩量的调节,弹簧调节量由垫柱的个数决定。图3、图4分别对应弹簧最大压缩量及最小压缩量工作状态。

图4 超深抛载装置示意图二
4.4 水声定位系统及水声通信装置
1)水声通信装置
水声通信装置主要用于AUV在水下工作时,母船上控制系统对之进行控制和数据交换。该自救系统水声通信装置主要采用成熟产品:Link Quest公司的水声通信装置,型号为UWM4000。
UWM4000主要由水下单元和水面单元组成,水下单元安装在AUV载体上,与决策中心进行数据连接。水面单元安装在母船上的安装架上,与信息处理单元连接。工作示意图见图5。

图5 UWM4000水声通信工作示意图
UWM4000的主要技术指标:数据传输速率:RS232波特率;4800 bps有效数据传输率:3200 bps;声链接:8500 bps;误码率:小于 10-9最大工作深度:3000m;工作距离:4000m;电压:12V~28V;波束宽度:70°;温度范围:工作:-5℃~45℃;贮藏:-25℃~75℃;最大运动速度:8kn;最大加速度:20g。

图6 UWM4000实物
2)水声定位系统
水声定位系统主要用来对AUV在水下的运动轨迹和大地坐标进行跟踪。水声定位系统分水面单元与水下单元两部分。水面单元主要包括安装在母船上的定位系统处理器和换能器基阵;水下单元为安装在运载平台上的信标。
本自救系统的水声定位系统采用超短基线定位系统(USBL),USBL的定位基线长度小于半波长,可以很精确、很方便地安装成一个平面测量阵,由船舶或平台放入水中。工作时,母船的换能器基阵发射询问信号,根据信标的应答时间测出水下AUV的距离,同时利用到达各阵元的应答信号相位差测出水下AUV的方位,从而得到AUV的大地坐标。USBL系统只需一个换能器,安装方便,在其适用的场合表现出很好的灵活性,但相对LBL和SBL,其定位精度较低。

图7 USBL水面单元处理器
4.5 卫星定位装置
卫星定位装置采用北斗二代卫星定位系统,具有定位、北斗短信和自毁功能。由天线、射频电缆和主机组成,其中天线采用微带结构形式,通过射频电缆与主机连接。
卫星定位装置定位功能是通过天线接收卫星信号,获取导航信息,从而计算得到卫星位置,速度和时间(PVT)信息,通过伪码测距获得卫星与卫星定位装置的伪距,通过载波相位变化率获得卫星与定位设备的多普勒频移,从而自主解算出卫星定位装置的位置、速度与时间等信息。

图8 卫星定位装置功能组成示意图
4.6 浮力水舱
浮力水舱是自主调节AUV浮力的装置,主要由盐度传感器、姿态传感器、浮力调节装置、自适应控制器等组成。主要用于平衡AUV由于海水密度变化引起的浮力波动、调节俯仰姿态等,以及AUV遇到突发事件时需要应急上浮则决策中心控制浮力水舱排水(最大排水量为430kg),从而实现AUV应急上浮。浮力水舱组成框图如下:

图9 浮力水舱组成框图
5 自救系统关键技术
1)海洋环境下可靠自救技术
海洋环境与陆地不同,其自然条件十分苛刻,除海面上变化莫测的惊涛骇浪之外,随着海中深度的增加而产生的压力和温度的变化也十分剧烈,并且机器人在海底作业过程中,还可能遇到不可而知状况,比如不规则暗流、淤泥、海底地震活动等。这就要求自救系统必须具有可靠性,在恶劣的环境中也能顺利完成自救任务[7~8]。
2)深海可靠通信及动作机构执行技术
本文自救系统是采用水声通信和卫星定位装置进行水下和水面通信,采用释放压载和浮力水舱排水的方式实现无人自主UUV的自救,因此可靠释放压载和可靠进行浮力水舱排水是整个自救系统顺利完成任务的重要保障[10~13]。
3)自救系统小型化、低功耗、工程化技术
由于自救系统是安装在水下无人自主航行器上,其体积有一定的限制,并且有时需要其自带电源,具有相对独立性,因此需要自救装置具有小型化、低功耗等特点。
6 结语
然而,由于海洋环境复杂多变,尽管装备了自救系统,AUV仍然会因发生意外而丢失,造成了巨大的损失,自救技术仍待进一步研究。
猜你喜欢
纺织科学研究(2021年9期)2021-10-14
数字海洋与水下攻防(2020年5期)2021-01-04
福建文学(2019年12期)2019-08-06
决策(2018年8期)2018-12-10
决策(2018年11期)2018-11-28
小天使·四年级语数英综合(2018年1期)2018-07-04
扬子江(2016年1期)2016-05-19
试题与研究·中考物理(2015年4期)2016-04-07
扬子江诗刊(2015年5期)2015-11-14
少儿科学周刊·少年版(2015年2期)2015-07-07