目标转弯机动对雷达跟踪性能影响分析
2019-03-10 09:13韩伟,朱沛,唐朝,陈朝
雷达与对抗 2019年4期
韩 伟,朱 沛,唐 朝,陈 朝
(1. 空军预警学院,武汉 430019;2. 95992部队,北京 100162)
0 引 言
现代战争中,为提高自身的生存能力和突防概率,采用突防战术的战斗机通常在被雷达锁定情况下会作规避的机动动作,通过自身运动状态的快速变化(通常采用加速度作为衡量指标)导致雷达跟踪精度变差甚至跟踪丢失。常采用的规避机动有蛇形机动、盘旋、8字形巡逻、水平急转弯机动等。[1-2]目标跟踪是指根据雷达所获得的对目标测量信息,连续对目标的运动状态进行估计,进而获取目标的航迹。为了实现对机动目标的连续稳定跟踪,雷达在数据处理过程中采用了Singer、半马尔科夫、当前统计(Current Statistic, CS)、Jerk、恒速转弯等机动模型[3-8],具备较好的机动跟踪性能。因此,目标机动与目标跟踪可视为“矛”与“盾”的对抗关系,既相互对立又相互促进。国内外学者分别用轨迹优化、微分对策、最优控制等思想对战斗机规避问题进行了大量研究[9-12],取得了一些研究成果,但均是单纯的从战斗机角度探讨机动策略,未分析雷达采用的跟踪模型及该模型对机动策略的影响。
本文侧重目标机动与传统相控阵雷达跟踪的对抗过程研究。该体制雷达的扫描周期有一定限制,针对雷达常采用的Singer、CS两种机动模型以及目标常采用的水平转弯机动,分析了跟踪模型不同参数条件下目标机动对雷达跟踪质量的影响,根据得到的结论设计了目标摆脱雷达跟踪的最佳规避策略。
1 机动目标跟踪模型
1.1 机动模型数学描述
1.1.1 Singer模型算法
Singer模型认为机动模型是相关噪声模型,而不是通常假定的白噪声模型,对目标加速度at作为具有指数自相关的零均值随机过程建模,即
(1)

对时间相关函数Rτ进行白化处理后,可用输入为白噪声的一阶时间相关模型表示为(一阶马尔科夫过程):
(2)
1.1.2 CS模型算法
CS模型就是在Singer模型基础上的一种改进方法,本质上是非零均值时间相关模型,其机动加速度的“当前”概率密度用修正的瑞利分布描述,均值为“当前”加速度预测值,随机机动加速度在时间轴上仍符合一阶时间相关过程,即有
(3)

1.2 航迹撤销准则
航迹撤销是航迹质量管理的一个重要组成部分。当航迹质量下降严重时,应当根据设定的航迹撤销准则将该航迹撤销,以防止更多虚假目标航迹的产生。这里,采用航迹管理中的记分法。当观测点迹落入关联波门内时航迹质量加上一定的分值,当目标漏检没有获得观测点迹或者观测点迹不在关联波门内时航迹质量应该减去一定的分值,当航迹质量分数降到一定门限以下时则撤销该航迹。k时刻航迹质量分数可表示如下:
(4)
S(k)=min(S′(k),1)
(5)

2 目标机动对跟踪质量的影响分析
2.1 目标逃逸方式
水平转弯机动是一种摆脱雷达跟踪的机动方式,同时也为了达到如巡逻侦察、摧毁打击目标的战术目的。在水平转弯的过程中,一般保持恒定的高度和速度。飞机的转弯速率与横滚角有密切关系。想要获得大的转弯速率就需要大的横滚角。横滚角与转弯速率以及转弯加速度的关系有下列公式表示:
Rturning=V2/(tanθrolling·g)
(6)
ω=V/Rturning
(7)
a=ω·V
(8)
其中,V为转弯前的目标速度,θrolling为飞机横滚角,g为重力加速度。
假设目标初始状态为xk=[30 km,0 m/s,100 km,0 m/s]T,目标在1~20 s进行匀速运动,第20 s时开始转弯机动,载机横滚角θrolling=60°,转弯前速度V=200 m/s,经过转向180°后继续做匀速运动20 s。目标转弯机动航线如图1所示。
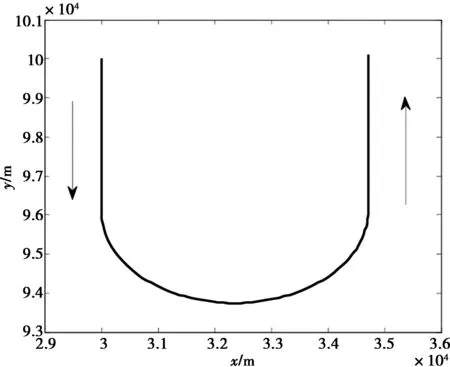
图1 转弯机动航线图
2.2 跟踪质量影响分析
采用航迹精度和跟踪丢失率两个指标进行评价。航迹精度主要包括位置估计误差均方差和速度估计误差均方差。跟踪丢失率可表示为N/M,其中,N为满足航迹撤销准则的次数,M为蒙特卡洛仿真次数。本文主要分析目标机动对Singer模型和CS模型跟踪质量影响。
2.2.1 对Singer模型的影响分析
目标初始状态同2.1,目标在1~40 s进行匀速运动,第40 s时开始转弯机动,载机横滚角θrolling=20°,转弯前速度V=200 m/s,经过转向180°后继续做匀速运动40 s。

图2 转弯机动航线与滤波结果
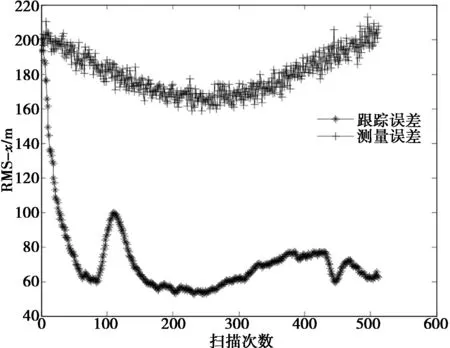
图3 目标跟踪的滤波误差
图2为目标转弯机动航线和Singer模型下的跟踪滤波结果,图3为目标跟踪的滤波误差。从仿真结果中可以看到,当目标以ω=tan20°·g/V=0.0178 rad/s=1.02°/s、a=ω·V=3.57 m/s2的转弯角速率和转弯加速度机动时,雷达采用Singer模型能够正常跟踪,且目标跟踪丢失率为0。
下面分析目标机动加速度和Singer模型中自相关时间常数(机动频率)对跟踪质量的影响。图4为自相关时间常数1/α=20 s条件下目标转弯横滚角分别为20°(转弯角速率1.02°/s,转弯加速度3.57 m/s2)、25°(转弯角速率1.31°/s,转弯加速度4.57 m/s2)和30°(转弯角速率1.62°/s,转弯加速度5.66 m/s2)3种情况的跟踪误差。从图4所示的仿真结果中可以看到,随着目标机动程度的增加,跟踪误差越来越大,跟踪质量变差,但这3种转弯速率条件下雷达不会跟丢目标。
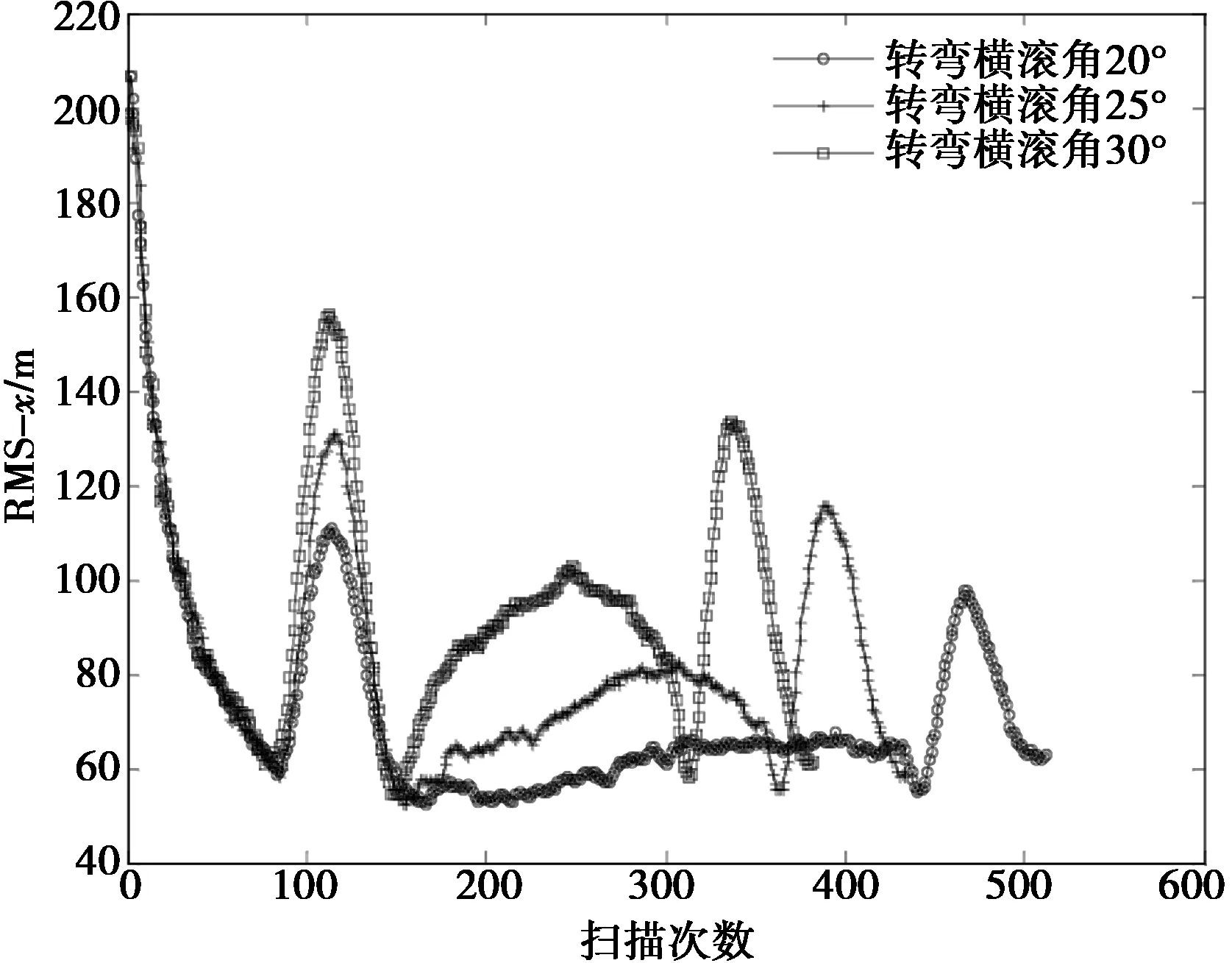
图4 不同机动程度下的跟踪误差
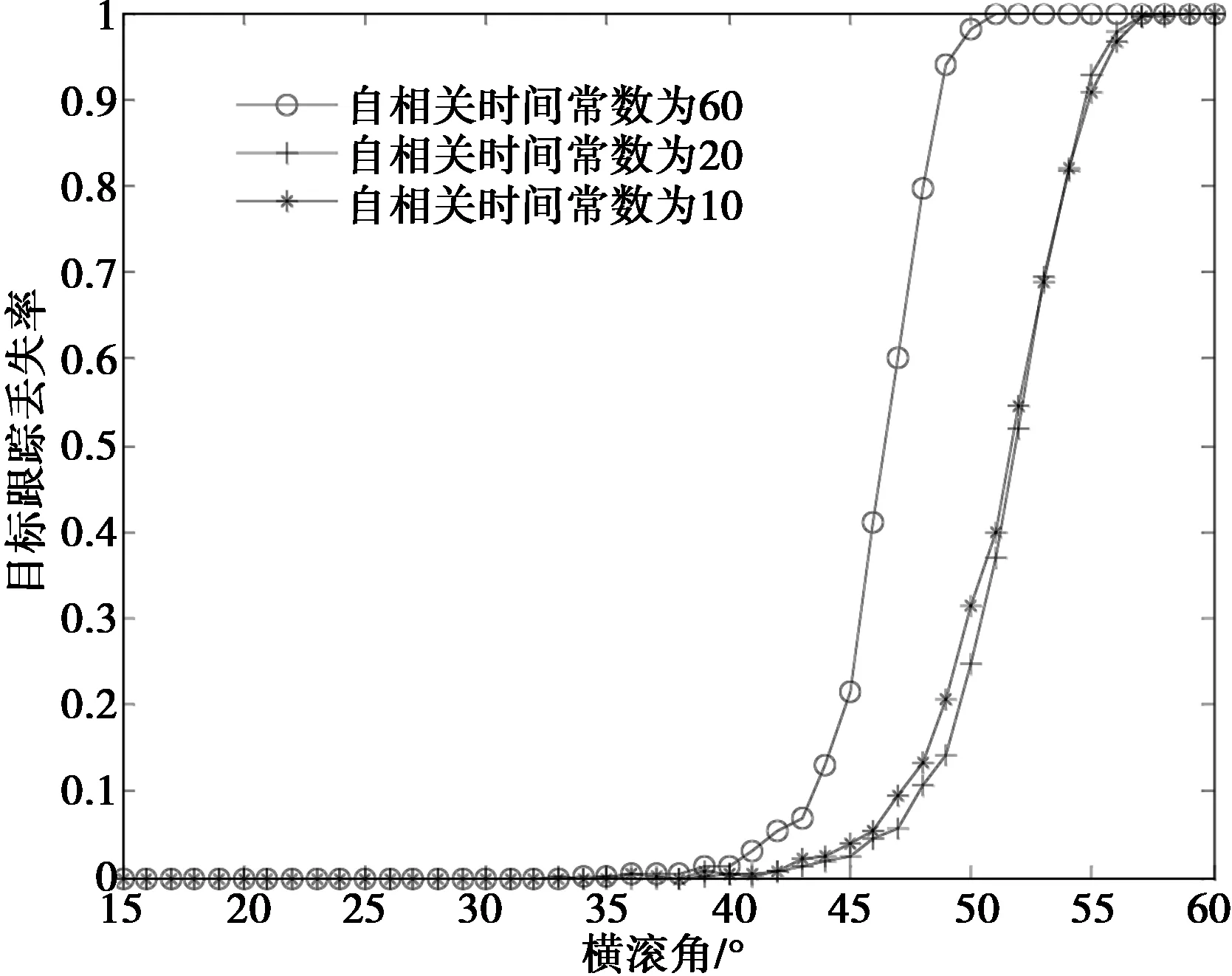
图5 Singer模型机不同参数下的目标跟踪丢失率
图5为Singer模型自相关时间常数1/α取60 s(匹配慢速转弯)、20 s(匹配逃避机动)、10 s(匹配强逃避机动)条件下目标跟踪丢失率随目标机动程度的变化情况。从图5所示的仿真结果中可以看到,目标转弯速率越高,跟踪丢失率越高,且Singer模型中的自相关时间常数1/α对跟踪丢失率影响较大。对于慢速转弯的模型,跟踪丢失率最大,逃避机动模型和强逃避机动模型的跟踪丢失率相差不大。这是因为机动频率α取1/20的逃避机动模型已足够用来适应一般的转弯机动,增大α对跟踪质量的提升作用不明显。
2.2.2 对CS模型的影响分析
仿真参数设置为:雷达采样间隔T=0.5 s,距离和方位的测量误差均方根分别为σρ=80 m和σθ=2 mrad,蒙特卡洛仿真次数M=1 000;自相关时间常数1/α=20 s,最大加速度ax max=100m/s2,ay max=100m/s2,a-x max=-100m/s2,a-y max=-100m/s2,关联门概率Pg=0.995。 目标运动轨迹同2.1。
图6为目标转弯机动航线和CS机动模型下的跟踪滤波结果。图7为目标跟踪滤波误差。从仿真中可以看到,当目标以ω=tan60°·g/V=0.0849 rad/s=4.86°/s、a=ω·V=16.97 m/s2的转弯角速率和转弯加速度机动时,雷达采用CS模型能够正常跟踪。经计算,目标跟踪丢失率为0。
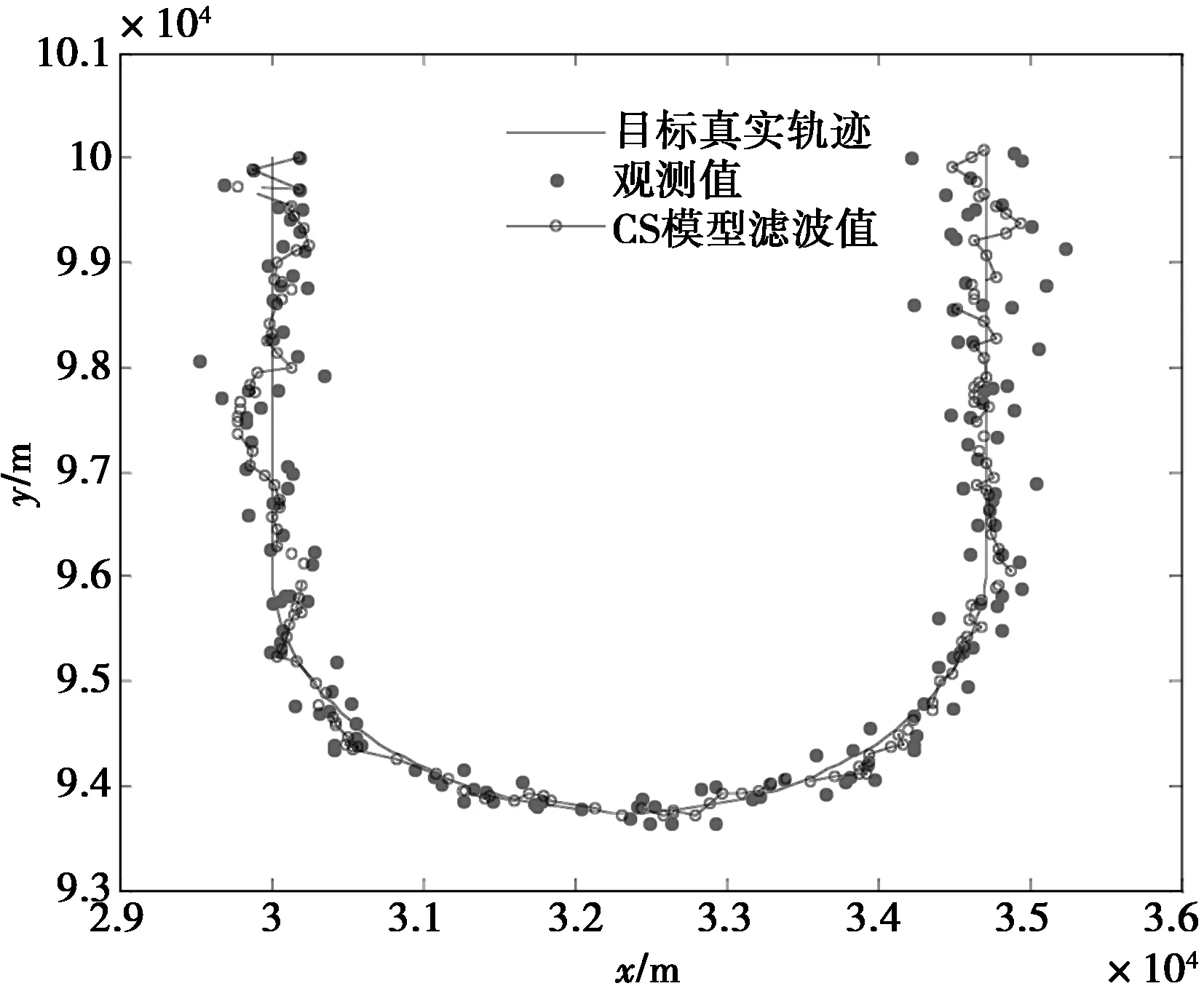
图6 转弯机动航线图

图7 目标跟踪的滤波误差
下面分析目标机动加速度和CS模型中自相关时间常数(机动频率)对跟踪质量的影响。图8为自相关时间常数1/α=20 s条件下目标转弯横滚角分别为30°(转弯角速率1.62°/s,转弯加速度5.66 m/s2)和60°(转弯角速率4.86°/s,转弯加速度16.97 m/s2)两种情况的跟踪误差。从仿真中可以看到,随着目标机动程度的增加,跟踪误差越来越大,跟踪质量变差,但这两种转弯速率条件下雷达不会跟丢目标。图9为CS模型自相关时间常数1/α取60 s(匹配慢速转弯)、20 s(匹配逃避机动)、10 s(匹配强逃避机动)条件下目标跟踪丢失率随目标机动程度的变化情况。从仿真中可以看到,目标转弯速率越高跟踪丢失率越高,但CS模型对目标转弯机动的适应性较好,即使目标以84°的横滚角(转弯速率26.71°/s,转弯加速度92.4 m/s2)转弯机动,在1/α=60 s条件下跟踪丢失率也仅为0.33。
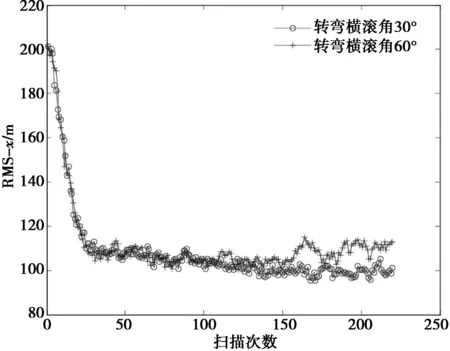
图8 不同机动程度下的跟踪误差
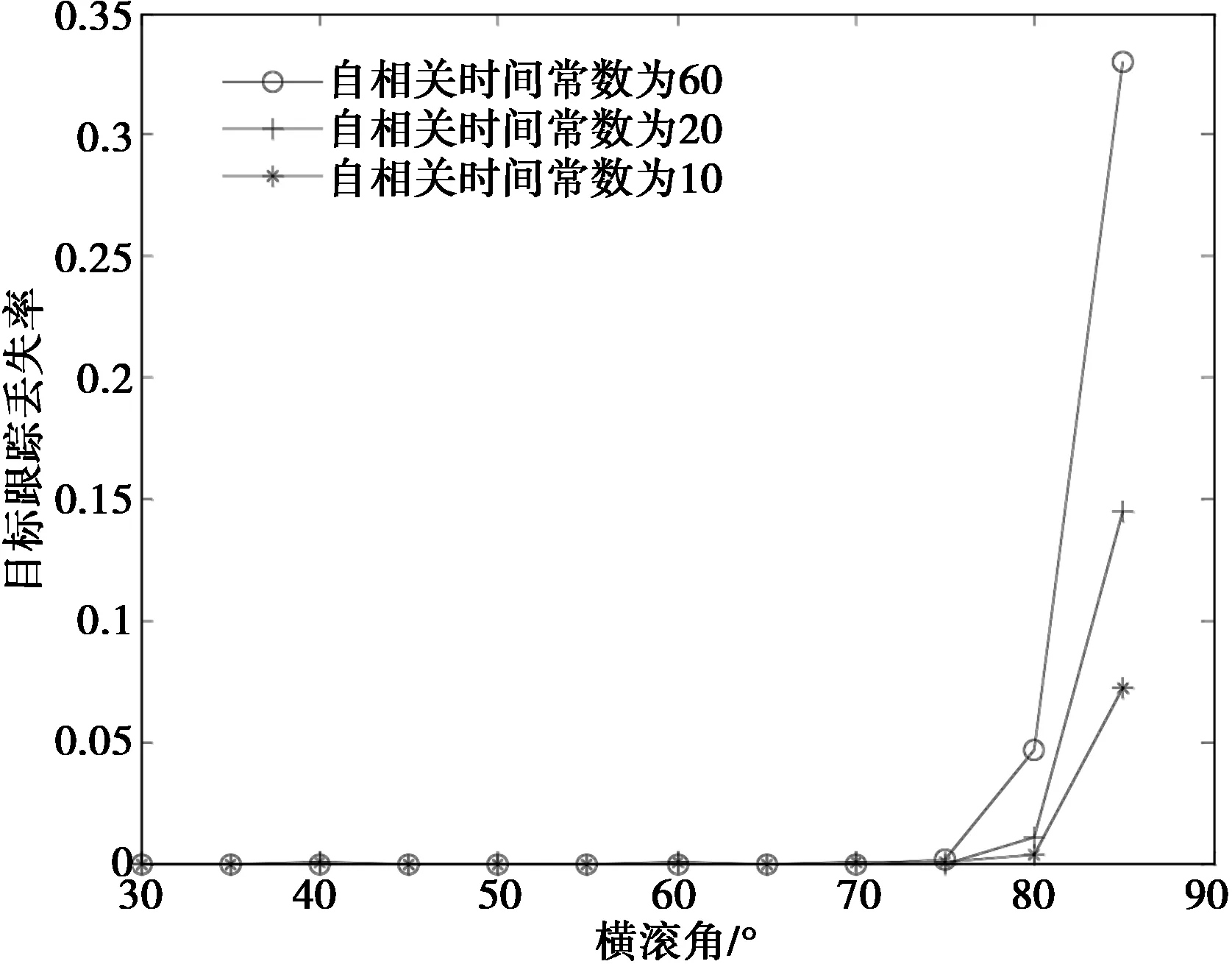
图9 CS模型机不同参数下的目标跟踪丢失率
2.2.3 目标机动对几种模型跟踪影响的比较
Singer模型和CSC模型在跟踪机动目标上的能力差异使得目标机动对两种模型条件下的跟踪性能影响不同。设置两种模型的自相关时间常数1/α=20 s,得到如图10所示的转弯机动对两种模型的跟踪丢失率的影响。从仿真中可以看到,目标机动对CS模型跟踪性能的影响要小于Singer模型,或者说CS模型对目标机动性的适应性强于Singer模型。
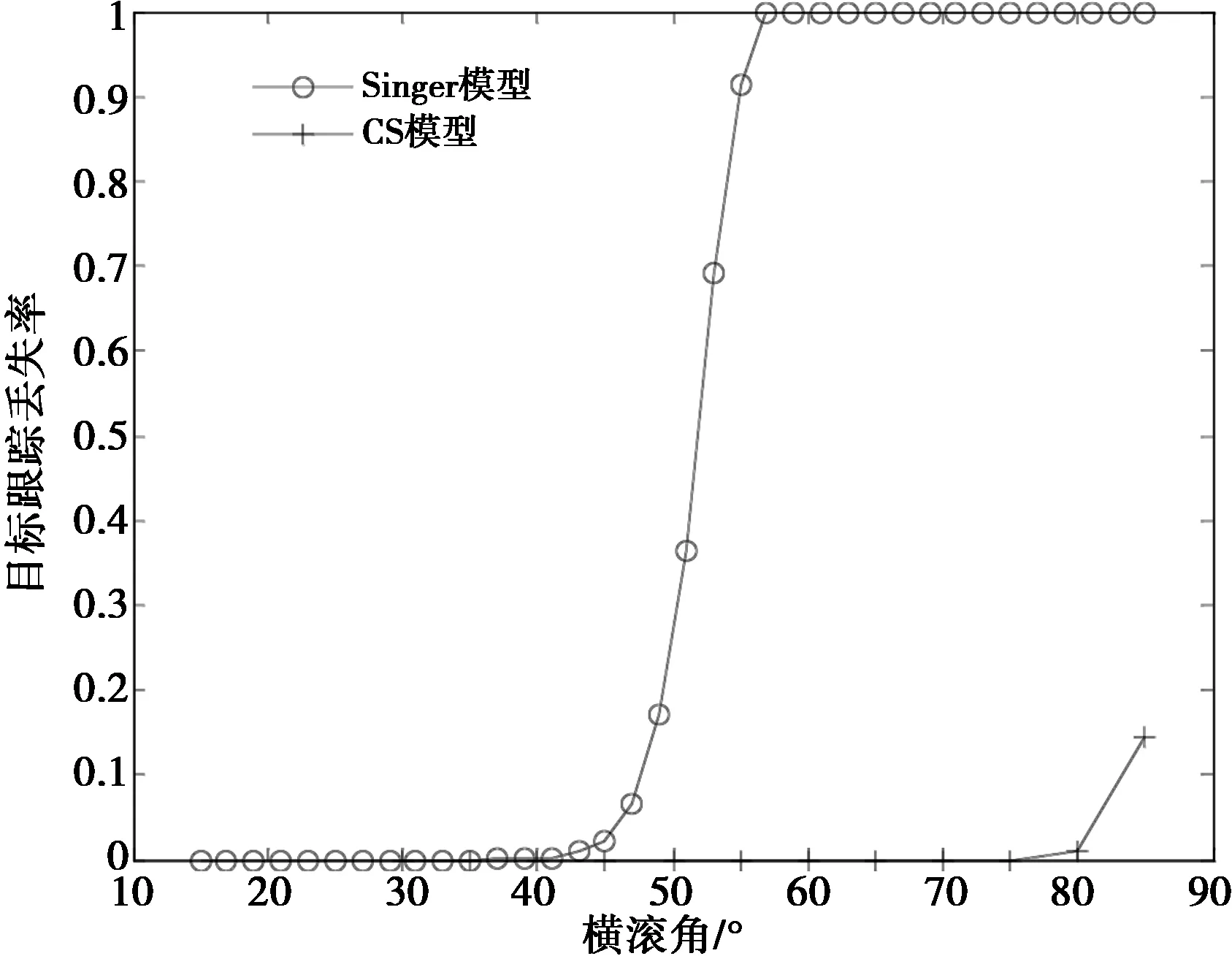
图10 转弯机动不同转弯速率下两种模型的
3 目标最佳规避策略
雷达如何能够更精确、更连续地跟踪目标,目标如何进行机动逃避雷达的锁定和跟踪,这实际上是一个攻防对抗的博弈过程。雷达的机动目标跟踪模型建立得越好,跟踪滤波算法越先进,则目标越难逃脱雷达的跟踪,或者说为了逃脱雷达的跟踪,目标需要采取的机动强度要更大。考虑到非机动目标的跟踪性能、计算效率和技术理论水平的限制等因素,雷达的跟踪模型不可能适应任何形式、任何强度的目标机动。如果获取了目标运动或者机动能力的先验知识,则模型的参数可以按照先验知识来设置,此时具有最佳的跟踪性能。如果先验知识未知,则假定的模型和模型中设置的参数可能并不能适应目标的机动,跟踪性能变得较差。对于目标而言,当被雷达跟踪锁定时,采取一定形式和强度的机动策略则可能摆脱雷达的跟踪,实现逃逸。
结合前面的机动模型跟踪结果来具体分析目标采取何种机动强度能够实现最佳规避。这里,将目标跟踪丢失率为0.5定义为目标能够摆脱雷达的锁定跟踪,然后根据目标跟踪丢失率随目标横滚角的变化曲线,得到对应的目标规避加速度。
表1显示了Singer模型和CS模型条件下水平转弯机动的规避加速度,从中可以看到,如果雷达采用Singer模型进行机动目标跟踪,则目标为摆脱跟踪所需要的机动程度要明显低于CS模型。对于两种机动模型,机动频率越大,目标为摆脱跟踪所需要的机动程度越高。

表1 两种机动跟踪模型下的转弯机动规避加速度
4 结束语
本文以目标机动和传统相控阵雷达跟踪的动态对抗过程为研究背景,针对雷达常采用的Singer、CS两种机动模型以及目标常采用的水平转弯机动,分析了跟踪模型不同参数条件下目标机动对雷达跟踪质量的影响。仿真结果表明:目标机动程度越强,跟踪丢失率越高,机动模型参数越匹配目标机动程度,跟踪质量越高,且CS模型对目标机动性的适应性强于Singer模型。最后根据以上分析结果设计了目标摆脱雷达跟踪的最佳规避策略。该研究为飞机在突防作战时如何采取规避机动提供了理论依据,具有一定实用价值。但是,本文提出的目标规避策略是基于雷达采用固定的扫描周期和经典机动模型来跟踪目标,而未采用快速多参数扫描跟踪融合方法。如果雷达采用这些方法,目标还应在自身机动的同时采取其他措施配合进行规避雷达跟踪,如对雷达施放欺骗干扰、利用雷达的多普勒盲区进行路线规划等。
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
舰船科学技术(2022年11期)2022-07-15
当代水产(2022年6期)2022-06-29
舰船科学技术(2022年10期)2022-06-17
考试与评价·高二版(2021年1期)2021-09-10
雷达科学与技术(2020年4期)2020-09-11
当代陕西(2019年12期)2019-07-12
汉语世界(The World of Chinese)(2019年1期)2019-03-18
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12