一种全面的CORS性能测试方法
2019-03-14 06:28王方超吕志平刘春鹤李林阳邝英才
全球定位系统 2019年1期
王方超,吕志平,刘春鹤,李林阳,邝英才
(信息工程大学 地理空间信息学院,河南 郑州 450001)
0 引 言
连续运行基准(参考)站网络系统(CORS),是在一定区域中建立永久性连续运行的全球卫星导航系统(GNSS)基准站,通过网络相互连接,构成网络化的GNSS综合服务系统[1].CORS网可以为用户提供时空基准,满足不同专业部门和单位对GNSS定位的要求,并且可以广泛应用于基础测绘、工程施工、城市规划、交通管理、资源勘测、气象研究、地震预测与预报、地图与地理信息更新等各方面各领域[2-4].对于一个新建立的CORS系统,系统的性能测试至关重要,它将直接关系到CORS系统在实际应用中能否提供精确、实时的定位信息.
目前已有多个国家和区域建立了由数百个甚至上千个连续运行参考站组成的CORS系统,众多学者对CORS系统的建设、基准站的质量检查以及系统性能测试方面开展了研究.文献[5]对我国第一个实用CORS——深圳CORS进行了性能测试,分析了深圳CORS的系统组成和性能指标,并在用户端的动态定位精度、可用性方面进行了测试;文献[6]对山西CORS系统基准站进行了速度场分析,确定了基准站的水平运动和沉降,并由此分析了山西省的地壳运动;文献[7]分析了陕西省GPS基准站的垂直形变;文献[8]对GNSS测站的速度模型进行了研究:对于CORS系统的定位精度以及数据质量检查,很多学者分别运用GAMIT-GLOBK、TEQC等软件做了深度的研究[9-12];在CORS性能测试方法方面,大多都从系统可靠性、定位精度和设备兼容性等方面进行分析[13-14].
随着我国BDS地基跟踪站网的进一步布设及升级,有必要建立一套同时兼顾服务端与用户端、更加完善的CORS系统性能测试方法,实现CORS性能测试的标准化、统一化.本文从应用实践角度考虑,提出了一种较为全面的测试方法.对服务端和用户端,分别从数据完整性、周跳比、多路径、系统可靠性、静态定位精度、动态定位精度、时间可用性、空间可用性等方面,给出了相应的测试方法与评估指标.以郑州CORS网(下文称为ZZCORS)的基准站数据和用户实测静态、动态测数据为例进行实验验证,测试方法得到了较好的应用.
1 CORS性能测试方法基础理论
对于CORS网的性能测试,本文所提出的方法综合服务端与用户端两个方面.服务端重点关注基准站的数据质量与稳定性.用户端重点关注CORS服务范围内的静态和动态定位精度、时间可用性以及空间可用性.
1.1 服务端
对于一个新建立的CORS系统,其能否满足实际定位精度要求,首先要看其基准站的数据质量情况.对于GNSS数据的数据质量检查,常用的几个测试指标为:数据完整性、周跳比(O/Slps)、多路径效应误差(MP1,MP2)等.其中数据完整性表示实际历元数与预期历元数的比值;O/Slps通常采用理论上可以观测到的历元数与周跳的比值:
O/Slps=Obspossible/Slps.
(1)
式中:Obspossible为理论上可以观测到的历元数;Slps为周跳值.
多路径效应对GPS测量的影响非常复杂,通常用GPS组合观测值来检查:MP1表示P1、L1、L2的线性组合,MP2表示P2、L1、L2的线性组合,他们分别表示L1、L2载波上的多路径效应对伪距和载波相位影响的综合指标:

本方法参照IGS站的数据质量分析经验结果,取MP1小于0.5、MP2小于0.75、O/Slips大于200作为标准来判定观测数据质量的好坏.通常情况满足这几个质量指标则可以认为该测站具有较好的观测环境和数据质量.
服务端关注的另一个问题便是CORS基准站的位置精度以及站速.本方法主要采用GAMIT-GLOBK软件,选取IGS站对CORS做控制,检验基线解算的标准化均方根误差(NRMS)以及所得CORS站坐标中误差,同时根据大量的观测数据解算基准站的站速,分析其年变量.其中NRMS表示单时段解算出的基线值偏离其加权平均值的程度,是从历元的模糊度解算中得出的残差,其计算公式为
(4)
参照GAMIT对于单天解基线解算的NRMS的要求,本文取NRMS小于 0.25作为评定标准.
1.2 用户端
在CORS的实际应用中,用户最为关心的便是系统的定位精度和可用性两个重要指标.其中定位精度包括实时动态定位精度与事后静态定位精度,系统可用性包括时间可用性和空间可用性.
1.2.1 定位精度
事后静态定位精度评定时,在CORS控制范围内均匀选取静态测试点并进行长期观测,采用GAMIT软件,联合郑州周边IGS跟踪站观测数据进行解算,将得到的坐标作为高精度已知值.同时,将测试点数据与CORS基准站数据进行联合网解,解算得到测试点的坐标,根据上述两套坐标的差值评定用户站的静态定位精度.
针对CORS的实时动态(RTK)定位精度,本方法主要通过内符合精度与外符合精度来评定.计算每一测点所有测量值的平均值,再将该平均值与每一测量值求差.统计所有差值的分布情况,并对差值在不同区间的概率进行统计,同时依式(5)分别计算系统在X、Y、Z方向的内符合精度:
(5)
式中:n为每一测点测量值总数;v为测点测试值与相应测试平均值在X、Y、Z方向的差值;M为系统分别在X、Y、Z方向的内符合精度,反映系统实时定位的稳定性与系统的收敛性.
将测试点的RTK测量的坐标与已知坐标进行检核,统计其外符合精度.X、Y、Z方向的外符合精度依据式(6)计算:
(6)
式中:Δ表示测试点的坐标值与已知值之差;n为每一测试点测量值总数;τ为系统外符合精度,反映系统定位的准确性.
1.2.2 系统可用性
CORS系统可用性可分为时间和空间两个方面.时间可用性是针对系统提供的RTK定位服务而言[3].它在一定程度上受客观因素的影响,当由于卫星运动、大气变化等原因造成某时刻系统可用卫星数达不到网络RTK定位服务所需的最少卫星数时,系统将无法提供有效的定位服务.针对CORS时间可用性,采用以下方法进行测试:选取测试点,连续观测24h,根据应测历元数与实测历元数,统计每个小时的丢失历元和丢失率,并统计系统的内符合精度,分析精度衰减情况,从而反映系统在时间上的覆盖范围和系统的内部稳定性.
空间可用性,是指在达到精度指标要求的前提下,用户能够得到RTK固定解的区域范围[3].此项性能指标可通过高速RTK测试的方法进行,主要测试动态条件下网络RTK定位的初始化时间,以及定位的稳定性和抗粗差能力.
2 实验与分析
实验采用所提出的方法,对新建立的ZZCORS进行了相关的测试.ZZCORS建立于2016年,如图1所示,共有5个永久性连续运行GNSS站,接收机类型为TPSNET-G3A,数据采样率为1s.

图1 ZZCORS分布图
2.1 服务端数据质量分析
实验选取2016年12月份31天的观测数据,运用TEQC软件对每一个站的观测数据进行了质量检查.5个基准站的31天观测数据均满足判定标准,MP1值平均为0.30,MP2值平均为0.34,O/Slps值平均为4 500左右,数据完整性均在96%以上.如图2所示,以DENF站为例,统计了2016年12月份共31天观测数据的MP1、MP2值,MP1平均值0.30m,MP2平均值0.33m.同时绘制了DENF站2016年12月1日LI多路径效应图,多路径误差小于2m.
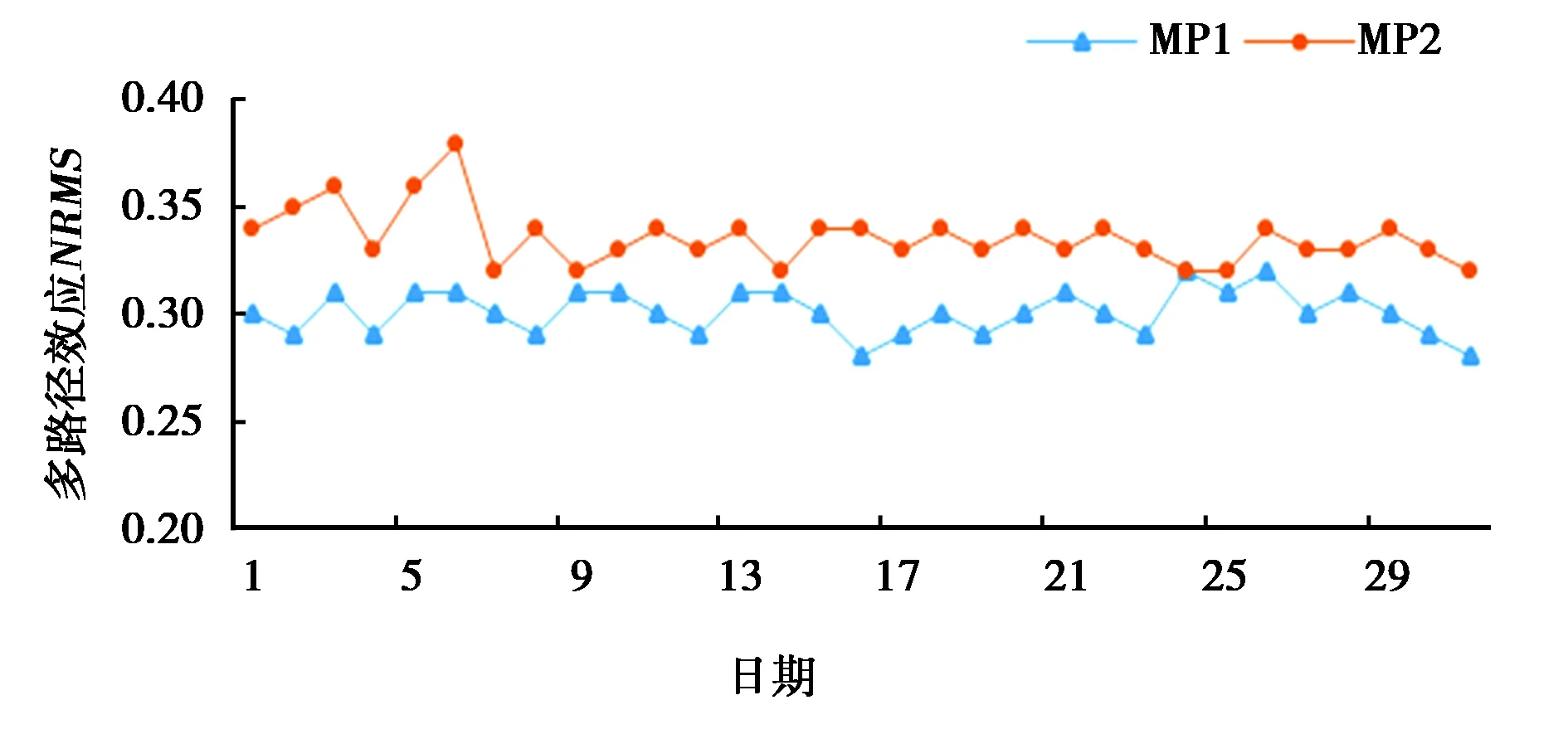
(a)12月份MP1、MP2值

(b)DENF站12月1日多路径效应图2 DENF站多路径效应
2.2 服务端系统可靠性分析
为了测试基准站的位置精度,实验选取ZZCORS于2016年5月至2017年5月的观测数据(采样率1s)以及分布于郑州周边的10个IGS站(如图3所示)的同期数据(采样率30s),利用GAMIT-GLOBK软件,解算ZZCORS基准站的精密坐标.

图3 选取的IGS站分布
采用GAMIT模块实现ZZCORS基线解算,相关参数与模型设置如表1所示.

表1 基线解算相关参数设置
解算得到了2016、2017年单天松弛解验后NRMS,其时间序列如图4所示,验后NRMS均小于0.25.
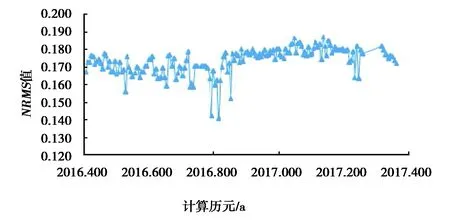
图4 NRMS时间序列
采用GLOBK模块,基于卡尔曼滤波,对ZZCORS基线向量进行网平差.平差过程中,所有单天基线解算均通过χ2检验,平差得到了所选取IGS站和ZZCORS各站点在ITRF2008框架下的精密坐标,中误差如表2所示.根据表2可以看出:ZZCORS各站精度较高,X分量平均中误差0.4 mm,Y分量平均中误差0.5 mm,Z分量平均中误差0.5 mm,N分量平均中误差0.4 mm,E分量平均中误差0.4 mm,U分量平均中误差0.6 mm.

表2 解得ZZCORS基准站坐标中误差 mm
为反应CORS基准站的稳定性,同时计算得到了各基准站在ITRF2008框架下的三维速度以及相应的中误差,结果如下表3所示和图5所示.
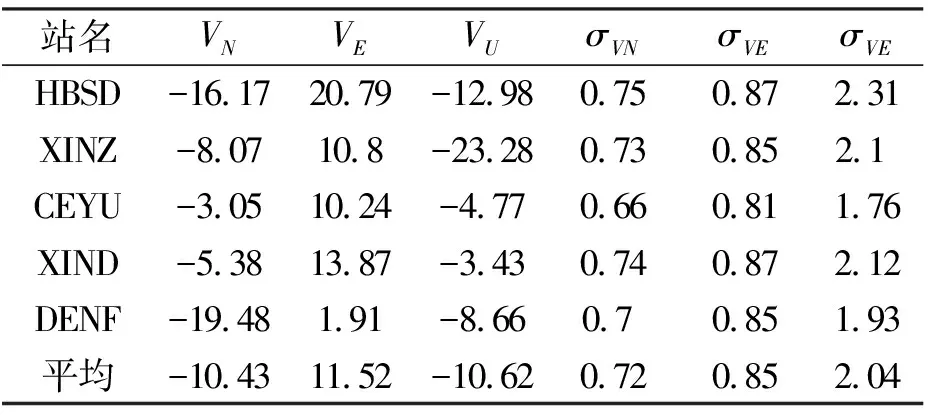
表3 ZZCORS基准站站速及中误差 mm/a
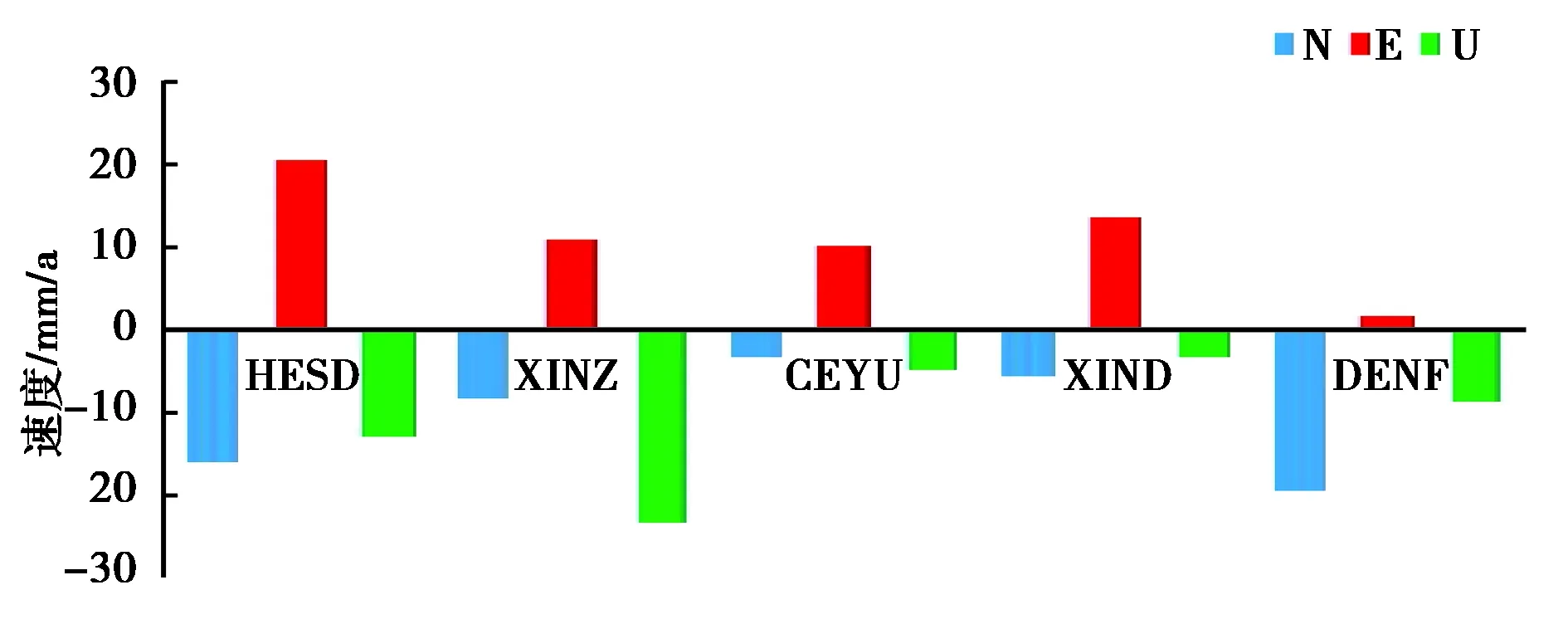
图5 ZZCORS基准站站速
从表3和图5可以得出:
1)水平方向:ZZCORS各基准站向西北方向移动,位移速度大致相同,平均在15 mm/a左右,HBSD站水平位移幅度较大,达到26 mm/a,分析原因可能为HBSD站建立地基不稳定.
2)垂直方向:ZZCORS各基准站均呈现沉降趋势,沉降平均速度11 mm/a, XINZ站沉降幅度较大,达到23 mm/a.分析原因为XINZ站附近土质较为疏松,建立一年多以来基准站发生了较大的沉降.
2.3 用户端定位精度测试
2.3.1 静态定位精度
实验选取LONT、HUTO、YANZ、ZHIF、JIDI、TIGU、LIZH、XUEG等8个测试点,以ZZCORS基准站为控制基准解算得到各测试点坐标中误差如表4所示,测试坐标N分量误差最大值1.09 cm,平均值0.31 cm;E方向误差最大值2.00 cm,平均值0.79 cm;U方向误差最大值3.24 cm,平均值1.95 cm.
表4测试坐标各分量中误差cm

站名σNσEσULONT0.250.742.14HUTO0.050.673.24YANZ1.090.840.35ZHIF0.620.172.34JIDI0.172.000.10TIGU0.140.202.80LIZH0.010.242.44XUEG0.141.502.24平均值0.310.791.95
将测试坐标与已知坐标作差,得到各点N、U、E方向坐标差值,如图6所示.坐标差值N方向平均0.3 cm,E方向平均0.6 cm,U方向较大,平均2.1 cm,说明在ZZCORS的服务范围内,连续进行24 h的静态观测,可以取得厘米级的定位精度.

图6 测试坐标与已知坐标之差
2.3.2 动态定位精度
实验选取JIXU、LVGU、XUEG三个测试点进行动态观测,观测分两个时段进行,两时段间隔1 h,每个时段进行两次拨号,得到固定解后开始记录观测数据,连续记录60个观测值作为一组测试结果,采样间隔为1 s.在测试过程中,采用双星系统(GPS+GLONASS 或GPS+BDS)和三星系统(GPS+GLONASS+BDS)模式交替测试.通过所得RTK数据,利用自编软件计算得到了测试点的内外符合精度.如表5所示,两个时段的观测中,测试点的数据剔除率平均为3.8%,内符合精度最大17.0 mm,最小7.0 mm,平均为10.0 mm,表明ZZCORS系统实时定位的稳定性与收敛性较好.外符合精度最大31 mm,最小15.0 mm,平均23.0 mm,外符合精度基本达到了2 cm.

表5 RTK动态定位内外符合精度 mm
2.4 用户端可用性分析
2.4.1 时间可用性
为尽量减弱周围环境的影响,实验选取空旷、周围无信号遮挡的一个测试点,以1 s采样率采集RTK固定解,连续采集24 h.统计每个小时数据采集的历元丢失率,如图7所示,每个小时的历元丢失率平均在5%,满足实际测量要求.
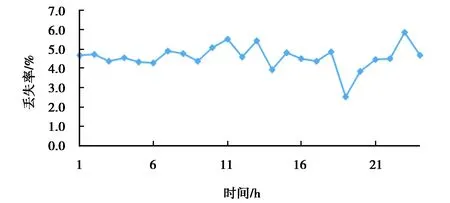
图7 数据丢失率时间序列
同时计算得到了每个小时测试点X、Y、Z方向的内符合精度,三个方向的内符合精度随时间的变化成相同趋势(如图8所示),基本精度优于10 mm,平均在6 mm,一天中在11:00—14:00波动较大.分析原因为:整个ZZCORS系统的服务覆盖范围位于中纬度地区,除中午12:00-14:00电离层变化较强外,其它时段电离层变化较为平稳.

图8 内符合精度时间序列
2.4.2 空间可用性
实验中将Trimble R10 型号GPS接收机天线用对中杆固定于车顶,在郑州市进行车载测量,车速40~80 km/h,采样间隔1 s,在网络RTK作业模式下解算坐标参数,车辆的运行轨迹如下图9所示.

图9 车辆运动轨迹图
通过Google Earth上标出的路线分布情况可以看出,ZZCORS系统可以覆盖整个郑州市区,在观测环境良好、汽车行驶速度不高于80 km/h的情况下,可以得到固定解.在周围有高大建筑遮挡、进入立交桥、隧道内时,多路径影响比较严重,存在信号遮挡问题.因卫星信号失锁而造成定位中断,会出现如图10(a)所示数据无法获取、轨迹中断的问题.放大图像后可以发现,测试数据所标出的行车路线平滑规律,基本与道路平行(如图10(b)所示),说明在高速状态下ZZCORS系统定位是稳定的、精确的.

(a)立交桥遮挡失锁

(b)正常行驶图10 动态路线细节图
同时在行进过程中,在郑州市各个方位统计了10次网络RTK初始化时间(如表6所示),在各个方位初始化时间处于一致水平,平均时间为15 s,已经满足了测量环境较好时的初始化时间水平[15].

表6 网络RTK初始化时间 s
对于CORS硬件与软件系统方面的测试,通常还包括设备兼容性、网络通信能力以及控制中心设备及软件功能测试等相关运行能力测试,这些方面的内容也是CORS系统性能测试的重要组成部分,但不是本文重点研究内容,在此不再赘述.
3 结束语
本文综合考虑服务端与用户端,提出了一种较为全面的CORS性能测试方法,从CORS的数据质量检查、系统可靠性、静态定位精度、动态定位精度、时间可用性、空间可用性等方面给出了相应测试方法与指标.实验以ZZCORS为例,进行了实验与分析,得到了如下结论:
1)数据质量分析:从数据完整性、多路径误差和周跳比三个方面分析.实验中,5个基准站的31天观测数据均满足判定标准,MP1值平均为0.30,MP2值平均为0.34,O/Slps值平均为4500左右,可以基本得出ZZCORS基准站的观测环境和观测数据是良好的.
2)系统可靠性:从基线解算NRMS值、基准站坐标精度、基准站稳定性分析三个方面分析.实验中ZZCORS的单天基线解算NRMS均小于0.25,基准站坐标精度达到0.4 mm,除HBSD站垂直方向沉降较大外,其余水平、垂直位移均在正常范围内.
3)静态定位精度:从测试点坐标中误差以及测试坐标与已知坐标的差值方面分析.实验中,以ZZCORS为控制基准解算得到测试坐标X分量最大误差1.7 cm,Y方向最大误差2.4 cm,Z方向最大误差2.8 cm;将得到的测试坐标与已知坐标作对比,得到各点三维坐标差.坐标差值最大为18 mm,最小为4 mm.
4)动态定位精度:从测试点的内符合精度与外符合精度方面分析.实验中测试点的数据剔除率平均为3.8%,内符合精度最大17.0 mm,最小7.0 mm,平均为10.0 mm,说明ZZCORS系统实时定位的稳定性与收敛性较好.外符合精度最大31 mm,最小15.0 mm,平均23.0 mm,外符合精度基本达到了2 cm的精度,对于RTK实时动态测量,该精度已经达到了CORS建设的要求.
5)时间可用性:从历元丢失率与全天内符合精度随时间变化方面分析.实验中,所选取测试点全天历元丢失率在5%,且随时间变化不大;内符合精度平均在6 mm,全天随时间波动不明显,中午11:00-14:00,受电离层变化影响波动较大,这也与实际情况相符合.
6)空间可用性:采用高速RTK方法从数据获取情况方面分析.实验中,在观测环境良好、汽车行驶速度不高于80 km/h的情况下,可以得到固定解,且初始化时间平均为15 s.在周围有高大建筑遮挡或行驶入立交桥、隧道内时,多路径影响比较严重,存在信号遮挡问题,会出现数据无法获取与轨迹中断的问题.
结果表明,本文建立的CORS性能测试方法,能够较为全面、系统地评价一个新建立的CORS系统在服务端与用户端的性能,可以为我国未来建立的BDS地基跟踪站网的性能测试提供重要参考.
猜你喜欢
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年5期)2022-10-13
仪器仪表用户(2022年6期)2022-06-06
军民两用技术与产品(2022年1期)2022-06-01
现代计算机(2021年14期)2021-11-20
导航定位学报(2021年4期)2021-08-29
中国科技纵横(2020年24期)2020-11-28
科学导报·科学工程与电力(2019年28期)2019-10-21
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01