
菜鸟看模型
2019-03-18 01:16
航空模型 2019年3期

小M本刊编辑,模型“菜鸟”
大F丰模世界技术员,模型“老鸟”
一、稳定爬升的条件
模型飞机爬升时有多种姿态。其中稳定爬升是最简单、最基本的一种。稳定爬升时,模型可看做匀速直线运动,其形成的条件与直线滑翔状态类似,除了要求模型所受的力矩平衡外,还要求所受的力也达到平衡。
由下图可知,只有当Y=Gcosθ时,才能保证模型的爬升角不发生变化。如果Y>Gcosθ,爬升角会越來越大;反之,爬升角会越来越小。只有当P=Gsinθ+X时,才能保证爬升速度不变。如果拉力P过大,模型的飞行速度会越来越大;反之如果拉力P过小,速度就会越来越小。
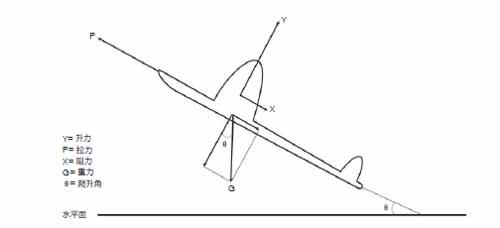
模型爬升阶段受力示意图
二、爬升所需速度
要保证模型处于稳定的爬升姿态,应先确定爬升时的速度。通常情况下,模型爬升时所需飞行速度小于平飞时所需速度,且爬升角越大、所需速度越小、相应的所需的拉力越大。
注意,对于稳定爬升的模型来说,并非爬升速度越大越好。以常见的小弹射模型为例,若机翼面积为1dm2,其平飞所需速度约为5m/s。当它以60°爬升角爬升时,所需速度约为1.3m/s。
但实际上,这种弹射模型的初速一般都在30m/s以上。模型以如此大的初始速度爬升时,机翼产生的升力将大大超过重力的分力,会破坏稳定爬升的条件,使模型作小半径的圆周运动,即发生拉翻。一般情况下,模型发生拉翻并不是机翼安装角不合适、头轻或弹射角过大所造成的,而是出手速度过大导致的。不过,弹射模型爬升的高度完全依赖初始动能,速度过小,爬升高度会降低,将影响模型的留空时间。

牵引模型滑翔机适合大速度大迎角的爬升方式
那么怎样才能使模型既拥有较大的爬升速度又不会破坏平衡呢?方法之一是减小模型的迎角。对于有可动舵面的模型,爬升时适当推杆,可减小迎角,此时动力的负担会相应减小,速度得到提升。待模型转为滑翔姿态后,应及时回杆,以保证其滑翔性能不受影响。而对于结构相对简单的入门级橡筋动力模型或弹射模型来说,则应通过减小机翼安装角的方法实现这种效果。
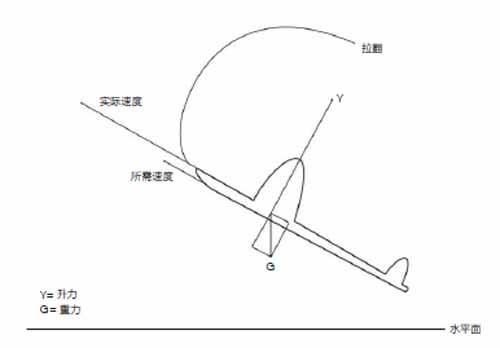
出手速度过大会导致模型发生拉翻
需要注意的是,上述方法并不适合牵引类模型。这类模型,应采用大速度大迎角的爬升方式。这样,模型会产生过剩升力,既能保证牵引线紧拉,又能使模型加速上升而不拉翻。

校园活动中常用的小弹射模型
三、爬升率
爬升率是指单位时间内模型的爬升高度,也叫垂直爬升速度。对于限制动力时间的模型来说,爬升率是保证留空时长的关键因素。
一般情况下,只需增大模型的爬升角和爬升速度,就可以提高其爬升垂直速度。具体措施通常为增大驱动动力、减小翼载荷或采用适当的迎角等。但是,一架模型调整好后,其迎角就确定了,升力系数也相应被确定。对于特定的升力系数来说,模型的爬升角和爬升速度是互相制约的:增大爬升角就必须减小爬升速度,增大爬升速度就必须减小爬升角。为了简化调整方法,日常操作时,建议通过仅改变爬升角的方式调整模型的爬升率。

动力竞时项目要求模型在限定时司内尽可能爬高
另外,调整时还需注意以下3点。
第一,要想获得最佳的爬升率,必须保证模型稳定爬升。否则其爬升角不断变化,再考虑哪一个爬升角的爬升率最大就没有意义了。
第二,为了使模型达到最佳的爬升角,需要使动力和迎角配合得当。
第三,不同模型的最佳爬升角不同,并无固定数值,需要根据具体情况确定。如竞时类自由飞模型,由于比赛限制了动力时间,因此需要在最短时间内尽可能爬高,故更适合采用小迎角直线爬升的方式。而对于橡筋动力模型来说,因为其橡筋的松紧变化通常为前紧后松,所以重点不是爬升率,而是有效分配动力的消耗。

大动力模型爬升时应适当推杆,防止模型拉翻。
四、常见爬升姿态
1.小角度爬升
爬升角小于45°被称为小角度爬升,这种爬升姿态的最大优点是稳定性较好。模型小角度爬升时,爬升角越小、稳定性越强。如橡筋动力模型在爬升阶段后期就属于这种姿态;自由飞模型的小动力试飞也属于这种姿态,适应性很强。
采用大动力驱动的模型也可通过调整,实现小角度直线爬升。调整方法是:模型爬升时加上较大的推杆,以减小迎角。需要注意,大动力模型采用这种方式爬升时,其爬升角比小动力模型更小,如果操纵不当,很容易矫枉过正,使模型进入爬升不稳定姿态。
2.大角度直线爬升
爬升角大于60°被稱为大角度爬升。其优点是能够较充分地利用动力装置产生的能量,减小无效损耗,以尽可能提升爬升高度。通常大动力驱动模型会采用这种爬升方式,飞行时应适当推杆,以减小升力系数。
不过,这种爬升方式的最大问题是,模型处于不稳定的爬升姿态。具体的表现是轨迹多变。有时,由于设备原因动力稍有下降或出手角度偏小,模型爬升时的角度就会明显变小,甚至可能变为小角度爬升。有时,因动力稍大或出手角度偏大,模型的爬升角又会迅速增大而出现拉翻或半拉翻情况。对于大角度爬升来说,因为操纵上的细微差别很容易导致模型产生不同的飞行姿态,所以掌握起来比较困难,需要多加练习。
大角度爬升还会带来另一问题,即模型由爬升转为滑翔时,飞行姿态难以预料。改出时的杆量如果配合不当,很容易影响模型的稳定滑翔。例如模型以垂直姿态爬升时,预定的推杆量正好使模型改平为滑翔。而若此时实际的爬升角变小,同样的推杆量会使模型变成俯冲姿态;而若爬升角变大,模型此时已经稍有后仰,再采用同样的推杆量反而会使模型的飞行姿态更加直立。
对于橡筋动力模型来说,由于其爬升阶段前后爬升率并不相同,因此这类模型爬升前段通常为大角度直线爬升方式,之后会逐渐过渡到小角度爬升。
3.大角度滚转爬升
为克服大角度直线爬升的缺陷,可将模型调成大角度滚转爬升的方式。这种调整方法通过修正模型在爬升过程中不断抬头的不稳定姿态,达到稳定爬升的目的。
为了克服模型抬头的趋势,应使其在爬升的过程中有一个绕机身立轴向右的转动,这种转动可使爬升状态中的模型低头。例如—架模型爬升时机身纵轴同水平面成60°角,此时再绕机身立轴右转,则纵轴会与水平面平行。如果转180°,机头就会变成向下俯冲状态。具体的调整措施是增加右舵或右拉力线。
如方向转动和抬头转动配合得当,模型不仅不会拉翻,还能大体保持一个合适的爬升角。但若转向角度太小,则不足以克服拉翻;转向角度过大,又会导致模型平旋甚至下旋。
这种方法有一个副作用,就是会使原来向右倾斜的模型的右翼越来越低(相当于绕纵轴向右滚转)。为了抵消这一副作用,爬升过程中应有一个绕机身纵轴向左的滚转,调整方法是加大右翼的安装角(俗称“好扭”)。
滚转爬升并不是十全十美的爬升方式。因为有3种转动(抬头、右转、左滚),所以实际调整中很难做到完全同步。如果配合不当,会影响模型的爬升高度或改出姿态,严重时甚至会破坏爬升轨迹。
4.垂直爬升
垂直爬升是最好的爬升轨迹。其优点主要有3个:第一,爬升路程最短,消耗的无效能量最少,可争取最大的爬升高度。第二,垂直爬升无升力迎角,飞行速度不受稳定爬升的限制。只要动力足够,初始速度可以尽量提高。第三,阻力最小,可为提高爬升速度提供必要条件。
虽然垂直直线爬升有诸多优点,但至今应用很少,主要原因是调整上存在较大困难。首先,很难保证模型每次飞行时迎角都是无升力迎角。重心位置的变化、机翼尾翼的扭曲变形,都可能产生升力迎角。而只要产生微小的升力系数变化(无论正负),垂直爬升就不可能实现。其次,出手方向并不常见,需要重新适应练习。

大角度爬升时模型可能出现的几种飞行轨迹

采用垂直爬升方式的F1P模型
猜你喜欢
科学Fans(2019年4期)2019-04-30
兵器知识(2017年10期)2017-10-19
中国科技纵横(2017年2期)2017-03-24
中学课程辅导·教师教育(中)(2017年2期)2017-03-24
航空知识(2017年2期)2017-03-17
红领巾·探索(2016年10期)2016-12-07
科技创新导报(2016年4期)2016-11-19
演艺科技(2016年9期)2016-05-14
中国摄影(2014年8期)2014-11-07
少年科学(2014年7期)2014-08-18
