
基于随机场照射的最优微波成像*
2019-03-26 08:26周天益
物理学报 2019年5期
周天益
(宁波大学信息科学与工程学院, 宁波 315211)
近年来, 电磁计算成像的理论和技术得到了广泛的研究和发展, 其中基于随机场照射的微波成像引起了诸多关注. 与传统成像方法的连续波照射不同, 基于随机场照射的成像方法以随机照射的方式获取多组非相关的目标散射测量值, 经过反演计算就能提取散射目标体的轮廓和形状等信息. 基于阵列天线理论, 本文理论分析并实验验证了一种最优的二维微波成像系统, 能够使用最少的天线单元实现随机照射, 通过最少的测量次数完成矩阵求逆并得到重建图像. 该系统主要有以下两个创新点: 完全随机照射的获取和成像系统最优参数的选取. 与基于超材料的成像系统相比, 本文通过对1 bit相位调制器随机相位调制的方式获取随机场照射, 使得每个天线单元都处于工作状态, 因此整个系统的能量效率更高. 此外, 所述单频成像系统还具有频谱效率高、结构简单、成本低等优点, 在安检、室内定位等不同场景中具有潜在的应用价值.
1 引 言
近几十年来, 微波成像作为微波领域的一个重要研究分支引起了人们的广泛关注和研究[1]. 不同于传统的光学或者红外成像方法, 微波成像能够穿透非透明遮蔽物得到金属或介质目标的位置、形状轮廓、电磁特性等信息. 目前, 研究人员针对各式各样的应用场景提出了多种不同的微波成像实验装置[2-6]以及相关成像算法[7-14], 其中包括安全检查[2,3]、无损检测[4]、医学诊断[5]、隔墙成像[6]等.
微波成像本质上属于电磁散射逆问题[7], 其主要原理是利用电磁波照射待测目标, 并通过散射回波信号来进行目标信息重构. 根据不同的成像方法, 传统微波成像可以分为基于雷达方法的微波成像和基于逆散射方法的微波成像两大类[1]. 基于雷达方法的微波成像主要通过简化的线性成像模型获取目标距离、位置、形状等定性信息. 由于考虑成像过程中的多次散射效应, 基于逆散射方法的微波成像相比雷达方法更为复杂. 与之相关的成像算法需要对非线性的逆散射问题进行求解, 以期得到成像区域的定量信息, 比如介电常数、电导率[7-14]等. 在实际的逆散射成像系统中, 发射天线发射连续波照射成像区域, 而一组不同位置的接收天线或者单个接收天线在不同位置对散射场进行接收. 为了得到较高分辨率的成像结果, 成像区域中离散化的网格数量远大于有限的测量次数, 这就导致了成像过程中的病态问题[15].
近年来, 有研究人员提出了一种基于随机场照射的微波成像新体制[16-24], 其中利用特殊设计的超材料或空腔结构的口径面实现随机场. 这类口径面通常由一组尺寸不同的谐振单元构成, 在特定频率点只有部分随机排布的谐振单元工作, 从而获得随频率变化的随机场分布. 在文献[21—24]中, 利用PIN结来获得相位可调的超材料单元, 并通过电压控制PIN结的通断实现随机场照射. 和基于雷达方法的传统微波成像方法类似, 这种基于随机场照射的成像新方法利用Born近似建立线性成像模型, 通过压缩感知[17-22]、矩阵共轭[16,23]、矩阵求逆[24]等算法获取目标形状、轮廓等定性信息. 通过构造伪随机场, 能够显著地降低各散射测量值间的相关性, 这就意味着求解方程的规模更小和计算时间更短.
上述基于随机场照射的微波成像新体制的关键在于构造足够随机的场分布, 而相位可调的阵列天线在理论上能够实现完全随机照射. 基于传统的阵列天线理论, 本文在理论上指出: 对于一组N单元阵列, 其中每个单元由单频、等幅、0/随机相位调制的信号激励, 经过N次测量能够得到N组不相关的测量值. 因此, 可以利用最少的天线单元来产生完全随机照射. 对于给定的成像分辨率和成像区域大小, 本文还提出了一种最优的二维微波成像系统, 并进行了数值仿真和实验验证. 该成像系统具有能量效率高、频谱效率高、结构简单、成本低等优点, 能够工作于微波、毫米波甚至太赫兹频段,在安检、室内定位等场景中具有潜在的应用价值.
2 理论分析
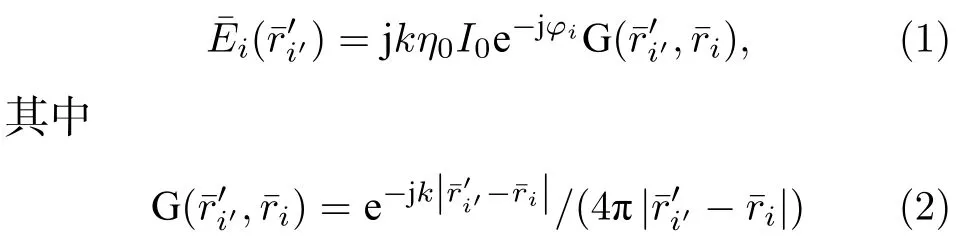
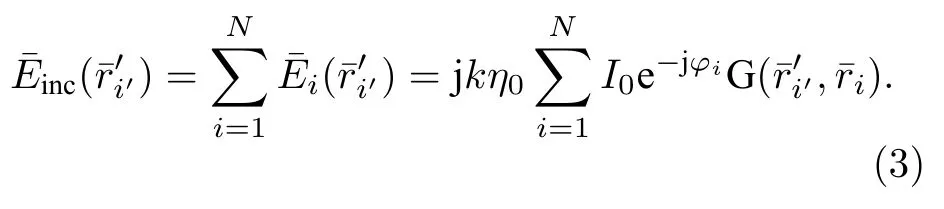
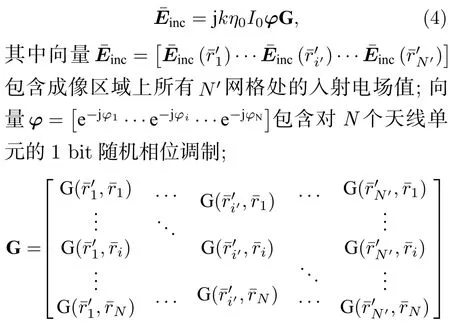
在基于随机场照射的成像体制中, 利用随机电磁特征的场分布对目标进行非相关测量, 从而实现对目标散射信息的有效拾取. 该成像系统的核心在于随机场的产生, 随机相位调制的阵列天线是其中的一种实现形式. 如图1所示, x-y平面内的阵列天线单元数量为N, 并标记第i个单元的空间位置为,. 假设每个阵列单元的激励电流为, 其中I0是一个常数. 为了实现随机照射, 阵列天线中的每个单元相位在0或之间做1 bit相位切换. 成像计算过程中, 成像区域被离散成 N' 个网格, 其中第个网格位于,.根据电磁传播理论, 由第i个天线单元辐射到成像区域处的电场表达式为
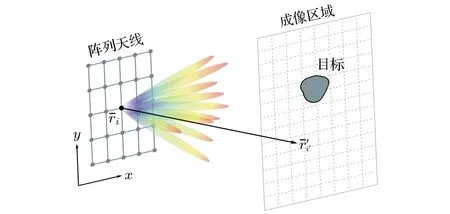
图1 基于随机场照射的成像系统示意图Fig. 1. Schematic diagram of the imaging system based on randomized field illuminations.
根据阵列理论, 不同单元所对应的格林函数不相关, 也就意味着N次完全随机调相后的电场是完全随机的, 而任何额外的照射都和前N次照射相关. 根据(3)式, 照射场的随机性取决于相位调制的随机性和格林函数间的非相关性. 因此, 天线单元的排布方式, 例如非均匀排布和稀疏排布, 均不会造成原理层面的影响.

在传统的逆散射成像系统中, 向各个方向传播的散射场通常由待测目标周围的多个天线进行测量接收. 而基于随机场照射的成像系统更接近于传统雷达, 主要接收目标后向散射信号. 因此, 利用一阶Born近似来描述成像区域中反射率空间分布和散射测量值g之间的关系, 得到如下线性成像模型[18]:

其中 H是系统传输矩阵, n为加性噪声.
图2为基于1 bit随机调相的随机照射成像系统框图. 位于发射端的发射天线(Tx)用于产生随机照射, 其中包含N路功分器、N个天线单元以及所对应的相位调制器. 位于功分器和天线单元间的相位调制器能够实现0和的1 bit相位调制. 而接收端的单个接收天线(Rx)用于接收散射回波.假设SOT和SRO分别是发射天线、接收天线与第个网格之间的传输系数S21, 其中.那么对于第m次随机照射,, 对应的传输矩阵H的元素可以表达为
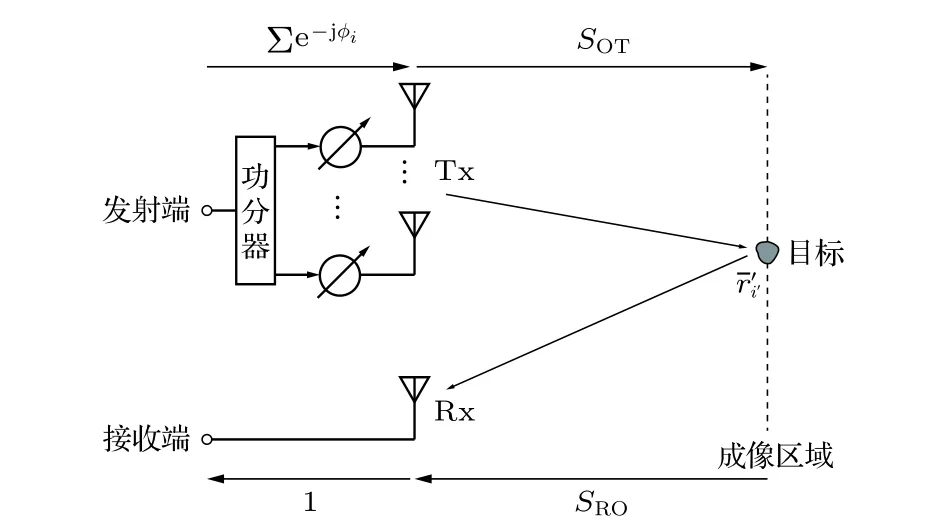
图2 基于 1 bit 随机相位调制的成像系统框图Fig. 2. System-level diagram of the imaging system based on 1-bit randomizedphase modulation.

并最终得到成像模型的展开表达式:

3 数值仿真
3.1 随机性验证
对于N单元的天线阵列, 即使对每个单元进行1 bit相位调制, 则共有2N不同排列组合的调相次数. 为了定量地评价随机场照射对散射信息的获取能力, 可以通过奇异值分解的方法来衡量H矩阵中不同测量模式间的相关性, 从而得到最少的测量次数M. 理想情况下, 奇异值曲线应当是平缓的曲线, 其中非零奇异值的个数被定义为矩阵的秩,秩越大意味着包含的信息越多[28].
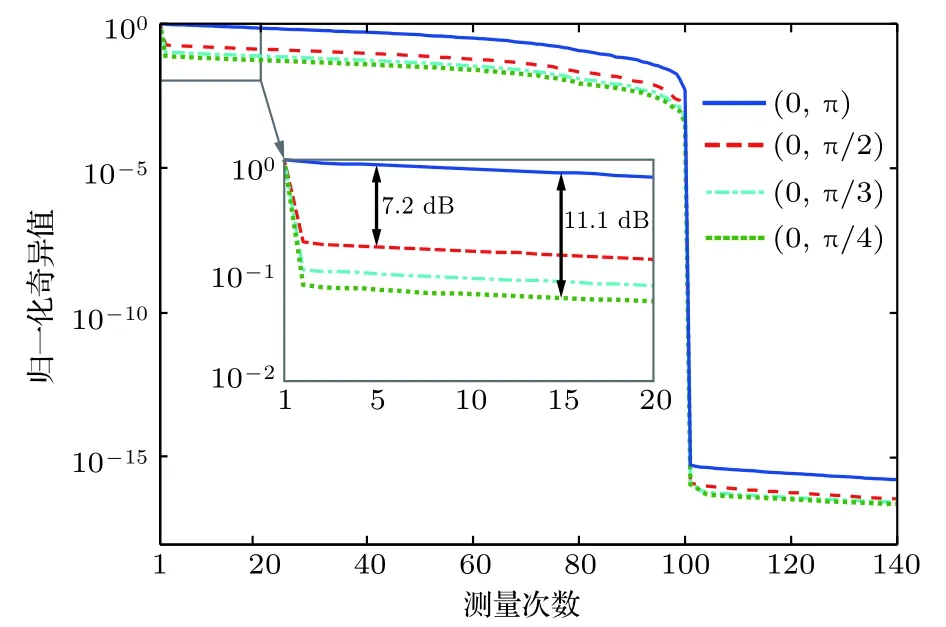
图3 不同 1 bit随机相位分布对应的 H 矩阵随机性分析Fig. 3. Randomness analysis of the H matrix for different 1-bit phase.
不失一般性, 假定天线阵列中单元数量N =10 × 10, 组阵间距= 1, 工作频率 5.8 GHz.成像区域划分网格数量为, 其间距= 0.5, 成像区域与天线阵列之间的距离R = 5, 随机调相次数 M 取值为 140. 为了观察不同相位分布对H矩阵随机性能的影响, 仿真中选取了4种服从高斯白噪声的1 bit随机相位分布, 分别为 (0,), (0,/2), (0,/3)和 (0,/4).根据上述参数, H矩阵是一个大小为的矩阵, 它的归一化奇异值曲线如图3所示. 当测量次数大于单元数量N时, 奇异值曲线迅速下降到零,表明此时新增的行向量(测量)之间具有很强的相关性. 对于前 N次测量, 0和相位所对应的奇异值曲线比其他曲线分别高7.2 dB和11.1 dB, 这意味更多的有效信息和更好的信噪比. 因此, 在随机照射成像过程中将选择0和的1 bit随机相位分布.
3.2 参数优化

图5 成像系统参数之间关系 (a)最优成像距离R与组阵间距Δr 、分辨率 Δr ′之间的变化关系; (b)最优成像距离R与天线单元数量N、分辨率Δr ′之间的变化关系Fig. 5. Dependence analysis: (a) Dependence of the optimal imaging distance with respect to Δr and Δr ′; (b) dependence of the optimal imaging distance with respect to Δr ′ and N when Δr = 0.5 .
为了探究不同系统参数之间的相互关系, 仿真计算中设置天线单元数量 N = 5 × 5, 组阵间距= 1, 成像分辨率= 2, 得到如图 4(a)所示的随测量次数和成像距离变化的H矩阵奇异值分布曲线图. 图4(b)为图4(a)在测量次数为25处的二维剖面图. 根据奇异值曲线, 对于不同的测量次数, 存在最优的成像距离 R. 具体地, 对于组阵间距, 最优成像距离为 10. 因此, 可以依据不同的组阵间距得到相应的最优成像距离R和分辨率的关系曲线, 见图5(a). 对于给定的成像分辨率, 最优成像距离随着组阵间距增大而增大. 同样, 保持组阵间距为典型的半波长, 还可以得到如图5(b)所示的不同天线单元个数N和最优成像距离R、分辨率之间关系曲线. 对于给定的成像分辨率, 最优成像距离随着阵列天线单元数量增大而增大. 依据阵列天线口径D和组阵间距、天线单元数量N之间关系, 结合图5还能够得出分辨率随阵列天线口径D增大而减小的变化规律. 以上性质与传统雷达的角分辨率一致.
3.3 仿真分析
为了验证上述成像系统最优参数的选取方法,假设给定的分辨率= 2, 成像区域为 10×10. 则离散化网格数量、天线单元数量N以及测量次数 M 均等于 5 × 5. 根据图 5(a)中 5 ×5阵列天线所对应的成像系统参数变化关系, 可以确定最优的成像距离以及相关的组阵间距. 考虑后续阵列天线硬件实现中相位调制器所需的设计空间, 在仿真和实验中选择组阵间距为1, 则最佳成像距离应为10.
根据以上系统参数, H矩阵是一个25 × 25的方阵, 对成像模型公式(9)采用直接矩阵求逆的方法得到重建图像, 即. 如图6(a)所示,仿真中采用反射率为1的“T”形金属块作为原始目标. 图6(b)和图6(c)分别为任意两次随机照射的电场分布图, 结果表明经过随机相位调制得到的场分布完全不同. 图6(d)为H矩阵的归一化奇异值, 缓慢下降的曲线意味着每次随机照射得到的测量值之间相关度低.
成像计算前, 高斯白噪声作用于散射信号g使其信噪比下降为15 dB. 为了验证最优的成像距离, 分别对不同成像距离处目标进行图像重建.图 7(a)—(c) 分别为成像距离 5, 10和 15处的归一化反演图像, 结果显示最优成像距离(10)处的成像效果最佳. 图7(d)进一步地展示了成像质量随成像距离R的变化关系, 其中采用归一化均方根误差 (NRMSE) 来衡量反演图像的质量. NRMSE定义如下:
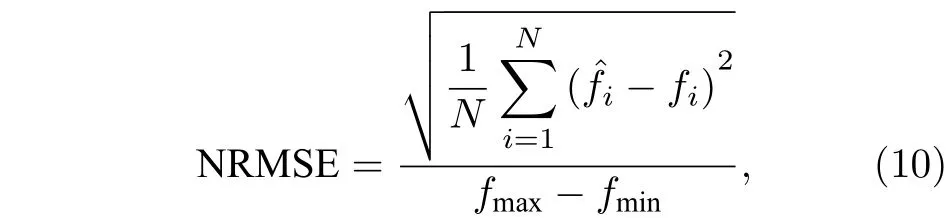
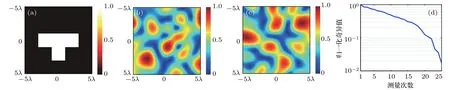
图6 仿真设置 (a) “T”形目标; (b), (c)任意两次随机照射; (d) H 矩阵的归一化奇异值Fig. 6. Simulation setup: (a) T-shaped object; (b), (c) randomized illuminations; (d) singular values of the H matrix.

图7 基于信噪比 15 dB 的仿真数据反演得到不同成像距离处的重建图像 (a) R = 5 的重建图像; (b) R = 10 的重建图像;(c) R = 15 的重建图像; (d)重建图像误差随成像距离的变化曲线Fig. 7. Reconstructed images based on simulated data with a 15 dB SNR. Reconstructed images for imaging distances of 5 (a),10 (b) and 15 (c), respectively; (d) NRMSE analysis of images reconstructed with different imaging distances.
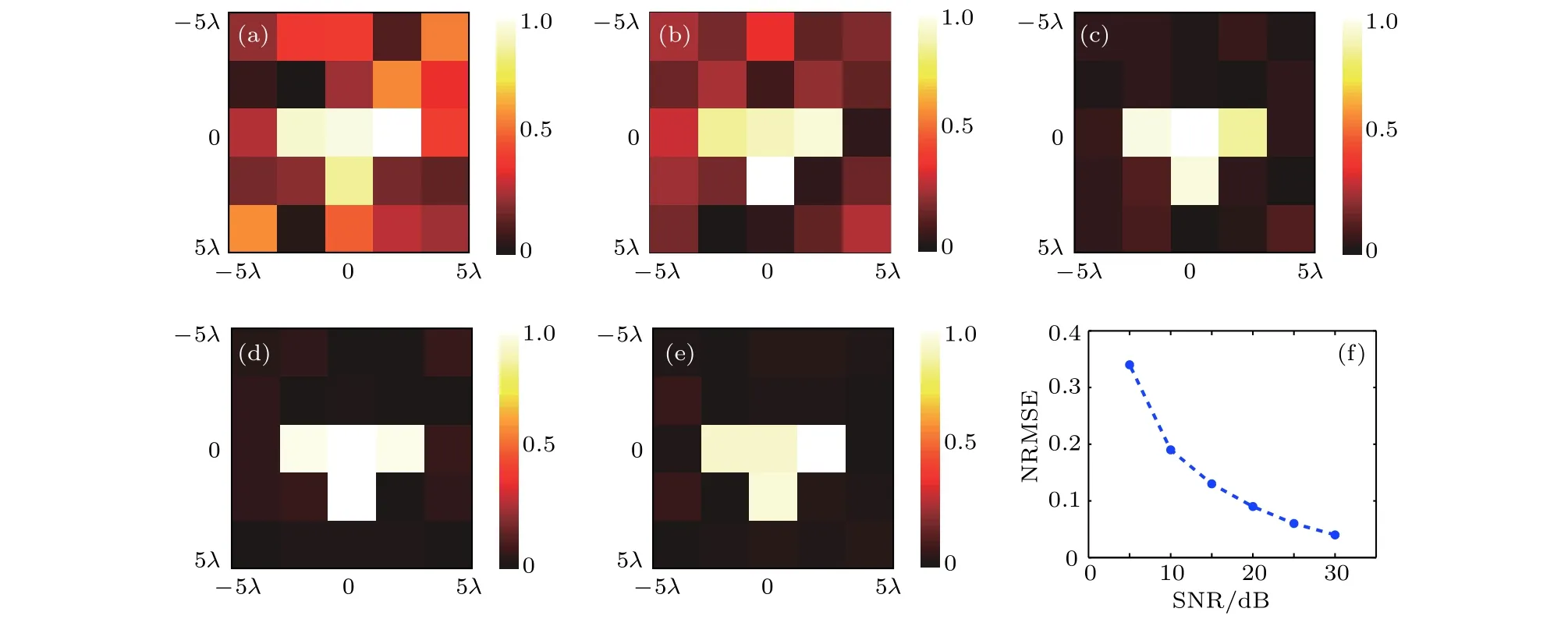
图8 基于仿真数据反演得到不同信噪比下的重建图像 (a) SNR = 5 dB; (b) SNR = 10 dB; (c) SNR = 20 dB; (d) SNR =25 dB; (e) SNR = 30 dB; (f) NRMSE 分析Fig. 8. Reconstructed images based on simulated data with different SNRs. Reconstructed images with SNR values of 5 dB (a), 10 dB(b), 20 dB (c), 25 dB (d) and 30 dB (e), respectively; (f) NRMSE analysis.
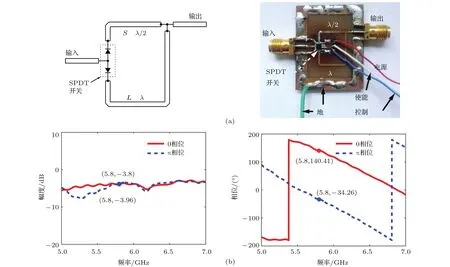
图9 1 bit相位调制器 (a)电路拓扑结构和测试板照片; (b)两种切换状态下实测幅度和相位Fig. 9. 1-bit phase modulator: (a) Topology and test board; (b) measured amplitude and phase difference.
为了探究成像系统的抗噪性, 仿真得到了不同信噪比条件(5—30 dB)下的重建图像, 如图8(a)—(e)所示. 图8(f)为NRNSE随SNR的变化曲线. 结果显示, 在低信噪比条件 (5 dB) 下, 仍能够得到可分辨的重建图像, 表明该成像系统具有一定的抗噪性能.
4 实验验证
4.1 实验系统
图2所示随机照射微波成像系统的核心在于随机相位调制, 其硬件实现为相位调制器. 具体地,该相位调制器为工作于5.8 GHz、具有180°相位差的一位数字相位调制器. 本文在短截线开关移相器电路的基础上, 利用不同长度的微带线和单刀双掷(SPDT)射频开关芯片完成相位调制器设计, 其中微带线长度差为半波长. 图9(a)为1 bit相位调制器的电路拓扑结构和电路板照片, 两段不同长度的微带线S和L的长度分别为/2和. SPDT开关芯片型号为MINI公司JSW2-63DR+, 该芯片能够在单端直流电压控制下完成信号快速切换, 以及高隔离度、低功耗和低插损等优点. 图9(b)为实际测量得到的不同状态下相位调制器幅度和相位曲线, 可以看到两种切换状态下的幅度分别为–3.8 和–3.9 dB, 相位分别为–34.26°和 140.41°, 相位差为174.67°, 基本满足设计需求. 由于开关芯片在 5.8 GHz 下的插损远小于 1 dB, 因此上述测量的损耗主要来源于SMA连接头以及其他可能的不匹配相位.
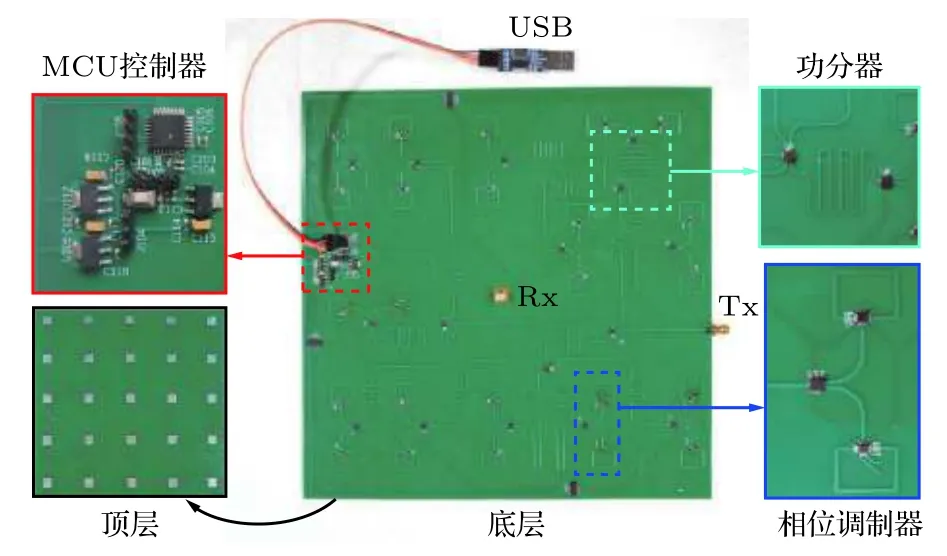
图10 成像实验系统的集成电路板照片Fig. 10. Photo of the board-integrated imaging system.
为了验证理论和仿真结果, 成像实验系统参数和3.2节中仿真参数基本一致, 即,= 1, R = 10,= 2. 图 10 为基于随机照射成像系统的集成电路板照片. 电路板整体尺寸大小为 25.5 cm × 25.5 cm, 板厚 2.3 mm. 集成电路板顶层为5 × 5微带贴片天线, 底层主要为功分器、相位调制器和单片机(MCU)控制器三大功能模块. 为方便起见, 位于中心的天线单元作为接收天线Rx. 其余24个天线单元分别连接到24个相位调制器, 再连接到24路功分器上构成具有随机照射特性的发射天线Tx. 最终, 通过两个SMA连接头分别作为Tx和Rx端口. 为了实现随机相位调制, 通过STM8单片机和3个八位移位寄存器组成的MCU控制器将24个1 bit随机数逐个发送到每个相位调制器. 上述系统采用了贴片天线作为阵列单元. 根据(3)式, 天线的增益(方向性)体现在阵列单元的格林函数中. 因此, 采用理论推导中的全向性点源或实验中的定向性贴片天线不影响系统的工作原理和理论性能. 但定向天线的采用将提高系统的信噪比, 从而有助于提高成像质量.
在实验过程中, 通过便携式计算机实现对MCU和矢量网络分析仪(VNA)的信号控制和数据读取. 首先, 计算机发送指令到MCU并开始一次随机照射. 随后, 计算机通过GPIB线从VNA中读取Tx和Rx两端口间的传输系数S21并保存.同时, 通过放大器来放大发射和接收信号, 从而保证足够的信噪比. 在实际应用中, 还可以采用小型化的微波集成电路来代替VNA测量得到幅度和相位, 例如文献[29]中提出的5.8 GHz多普勒雷达传感器.
4.2 H矩阵的构建
在成像之前, 首先需要得到包含随机场特性的H矩阵[18]. 目前构建该矩阵主要有两种方式:1)近场扫描法, 对发射/接收天线进行近场扫描,通过傅里叶变换将近场信息转换到位于远场的成像区域, 此处的电磁场信息即为H矩阵[20]; 2)逐点校准法, 将分辨率大小的校准反射体逐点放置于成像区域中所有网格, 综合每个网格处的传输信息就构成了H矩阵[24].
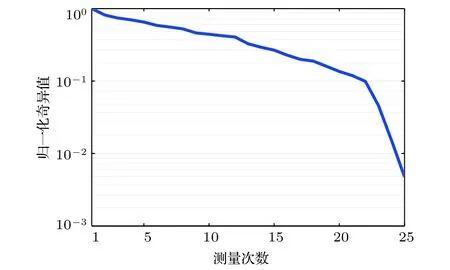
图11 实测 H 矩阵的归一化奇异值Fig. 11. Normalized singular values of the H matrix using the measured data.
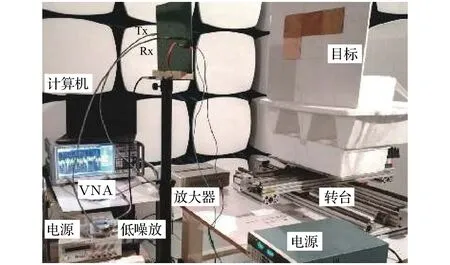
图12 基于随机多波束照射的微波成像实验系统Fig. 12. Experimental setup of the imaging system based on random field illuminations.
从实际操作角度, 本文采用易于实现的第二种方法. 具体地, 选择 2× 2的金属片作为校准反射体. 在第一次的校准测量中, 校准反射体放置在成像区域中的第一个网格处. 随后, 25次随机照射得到25个S21测量值, 从而构成H矩阵的第一列.在剩余的24个网格处分别重复上述校准过程, 最终得到完整的H矩阵. 图11为实际测量H矩阵的归一化奇异值曲线, 结果表明, 尽管实际实验中测量次数和发射天线单元个数并不相等, 但是由于测量误差和系统噪声的影响, 使得第25次测量与先前测量值并不完全相关, 因此仍可以通过伪逆矩阵来求解方程(9).
4.3 实验结果
图12为利用VNA、放大器等仪器以及随机照射天线阵列搭建的成像实验系统, 其中步进转台用于精确地得到不同成像距离. 测量中, 首先在成像区域放置不同形状的金属片作为待成像目标体(如图12中所示的倒“L”形图案); 同时移动步进转台使目标体位于成像距离R处; 随后计算机向阵列天线依次发送25次随机照射指令并读取VNA的S21测量数据. 最终, 利用测量得到的散射测量值g和校准得到的H矩阵, 通过矩阵求逆的方法得到反演结果.
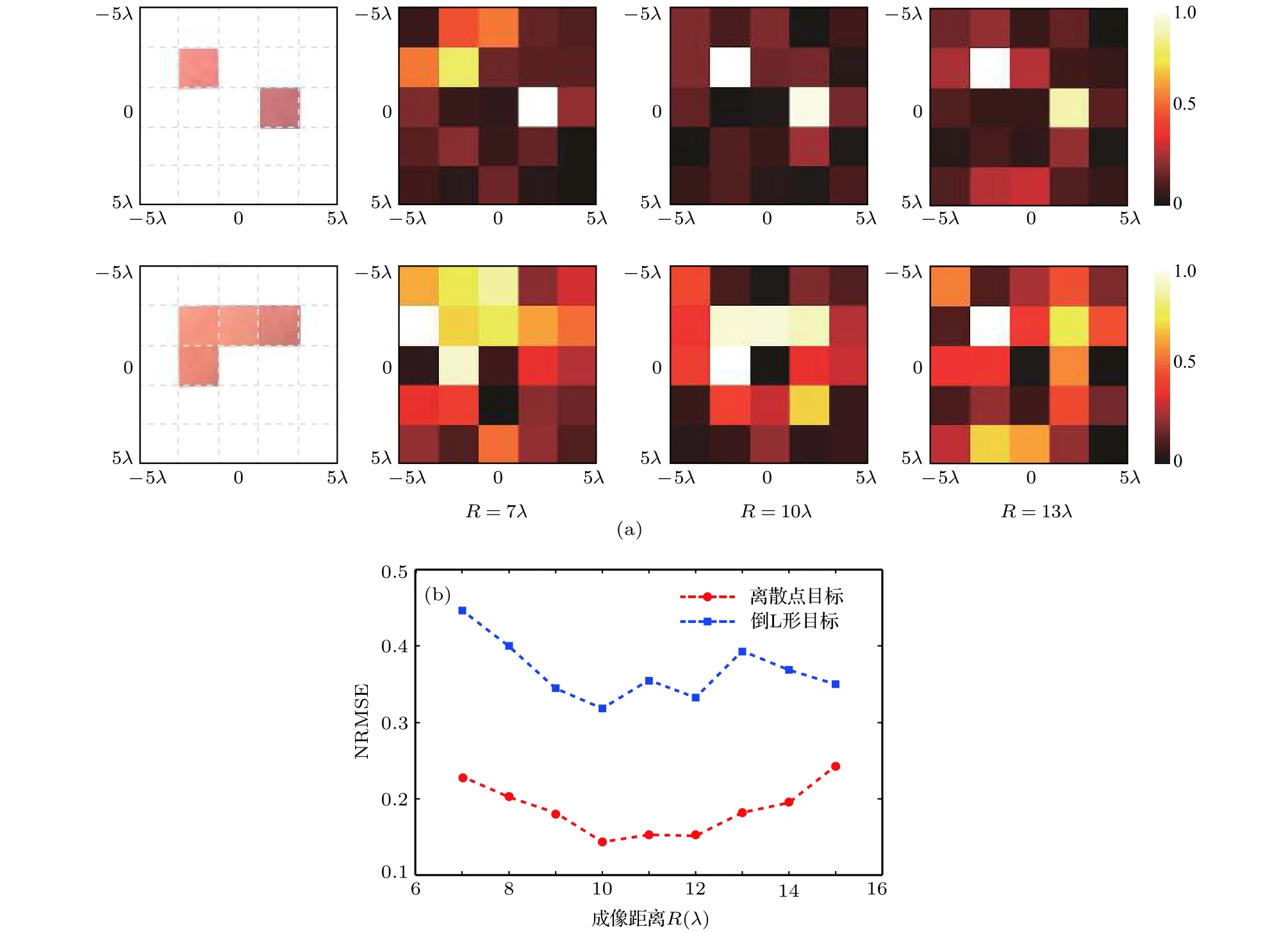
图13 不同成像距离处的成像实验结果 (a)离散点目标和倒“L”形状目标在不同成像距离R的重建图像; (b)重建图像误差随成像距离R的变化曲线Fig. 13. Experimental results with different R: (a) Reconstructed imageof two discrete objectsand inverted L-shape objectat 7 ,10 , and 13 distances, respectively; (b) NRMSE analysis.
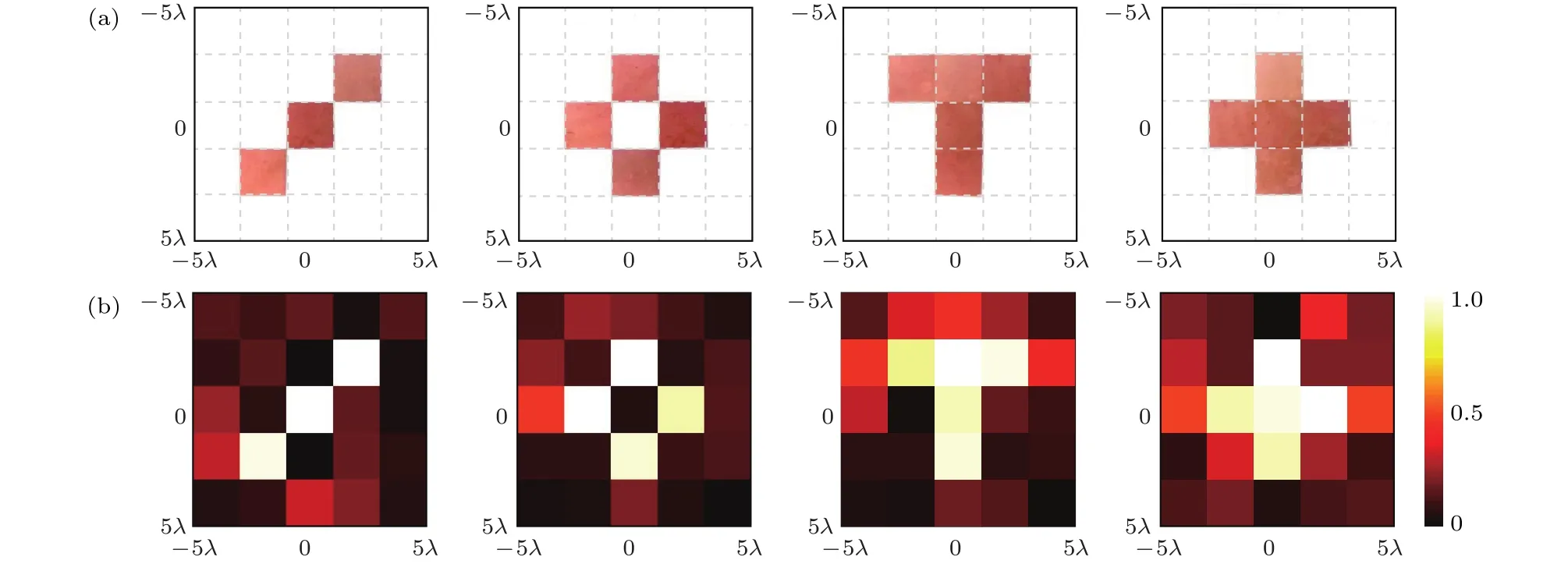
图14 在最优成像距离处的成像实验结果 (a)原始目标; (b) 重建图像Fig. 14. Imaging results at the optimal distance using experimental data: (a) The original objects; (b) reconstructed images.
5 讨 论
综上, 仿真与实验结果验证了本文所提出的基于随机场照射的最优微波成像系统. 对于给定的成像分辨率和成像区域大小, 可以利用最少的天线单元和测量次数来完成随机照射, 并得到最优的二维微波成像系统. 与先前基于超材料的成像系统相比, 本文提出的成像系统通过 1 bit 0/相位调制的方式获取随机场照射, 使得每个天线单元都处于工作状态, 因此整个系统的能量效率更高. 而且该时分系统工作于单一频率, 具有频率效率高的优点.
理想情况下, 能够通过增加天线单元数目实现高分辨率成像. 然而, 这种阵列并不适用于实际应用场景. 对此, 可以采用多种方法来解决高分辨率的问题. 首先, 压缩感知或者基于优化的成像算法能够求解分辨率增加而产生的病态方程; 其次, 可以通过跳频、多载波或者宽带信号在频域上增加非相关的测量次数; 最后, 提高信号的频率能够在减小口径面的同时显著地增加分辨率.
6 结 论
综上所述, 本文基于阵列天线理论, 理论分析并实验验证了一种最优的二维微波成像系统. 该系统主要有以下两个创新点: 1)完全随机照射的获取; 2)成像系统最优参数的选取. 对于给定的成像分辨率和成像区域大小, 能够使用最少的天线单元实现随机照射, 通过最少的测量次数完成矩阵求逆并得到重建图像. 所述成像系统具有能量效率高、频谱效率高、结构简单、成本低等优点, 能够工作于微波、毫米波甚至太赫兹频段, 在安检、室内定位等不同场景中具有潜在的应用价值.
猜你喜欢
广西师范大学学报(自然科学版)(2022年2期)2022-03-25
合肥工业大学学报(自然科学版)(2020年7期)2020-08-05
电子制作(2019年15期)2019-08-27
数学物理学报(2019年3期)2019-07-23
家庭影院技术(2018年9期)2018-11-02
红领巾·探索(2018年12期)2018-01-26
制造技术与机床(2017年7期)2018-01-19
电子制作(2017年13期)2017-12-15
金色年华(2017年12期)2017-07-18
自动化学报(2017年5期)2017-05-14
