
铲挖式表层月壤采样器设计与试验
2019-04-04 06:00姜水清刘荣凯林云成马如奇刘宾刘天喜
中国空间科学技术 2019年1期
姜水清 ,刘荣凯,林云成,马如奇,刘宾,刘天喜
1.空间智能机器人系统技术与应用北京市重点实验室,北京空间飞行器总体设计部,北京 100094
2.哈尔滨工业大学机器人技术与系统国家重点实验室,哈尔滨 150001
3.哈尔滨工业大学航天学院,哈尔滨 150001
星球土壤采样是宇宙探测活动的重要任务之一,是实现对地外天体土壤物理化学性质的分析,进而对宇宙空间环境、星球演化历史进行研究的前提。在各个星球探测的任务中,多种形式的采样器被应用到星壤样本的采集探测中。20世纪70年代,苏联向月球先后发射了Luna 16、Luna 20和Luna 24三种探测器,以无人自动钻取的方式成功获取了总计326g的月壤样品并返回地球[1]。美国在Apollo任务中依靠宇航员携带采样工具来实现月壤及月岩样品的获取,其主要的采样工具为手持式挖斗、耙、取芯管、钻机等[2]。
1975年,NASA发射了海盗1号和海盗2号火星探测器。探测器的机械臂与着陆器连接,末端安装有采样装置。采样装置的头部是一个类似于前端有盖的铲形容器,可用于各种类型的采样操作[3]。NASA于2003年发射了携载MER(Mars Exploration Rover)机械臂的火星巡视探测器,2004年1月成功着陆火星[4]。MER底部机械臂上装有研磨式采样设备(Rock Abrasion Tool,RAT),岩石的研磨通过带有2个金刚石尖齿的研磨轮高速(300r/min)转动来实现[5]。
MSL(Mars Science Laboratory)的主要功能就是实现对火星表面地形的巡视,利用一套颗粒钻取收集系统将采集到的岩土样品放入位于其背部的岩土分析器进行在线分析[6-7]。MSR(Mars Sample and Return)火星无人采样返回计划是NASA近期正在研究的项目之一,机械臂搭载的末端执行器主要使用钻取的方式进行采样[8-9],这样可以保证采样到样品的层理信息,同时可以对深度达lm的星球次表层样品进行采集[10],更主要是可以采集较为坚硬的岩石样品。NASA的凤凰号火星着陆器于2008年5月成功抵达火星表面,其上搭载的样品采集设备包括机械臂、采样铲[11]。机械臂末端装有可移动采样铲,采样铲前面装有带锯齿的刀刃,后面装有带锋利尖齿的动力锉刀,可穿破冻土获取样本[12-13]。ESA和ASI(意大利空间局)合作共同进行的行星表面小样本采样工具(SSA/DT)研制项目中,使用了香港理工大学研制的“微型末端感应器(MEE)”用于从火星或彗星表面采集微量土壤样品[14-15]。猎兔犬2号设计为探索火星表面基础数据以及搜索生命迹象,带有一个4自由度的机械臂,末端包含一对钳子,能够对目标岩石研磨和取样[16]。2009年加利福尼亚州帕萨迪纳NASA喷气推进实验室机器人硬件系统工作组为火星样品返回任务设计了可分离式铲挖器,采样器特色在于铲挖爪分为可完全合拢的两半,分别由独立的卡具驱动[17]。哈尔滨工业大学设计一种能够铲挖与振动筛选样本的末端执行器[18]。东南大学研制了一种安装于柔性臂末端的表层月壤采样装置,该装置利用柔性臂的伸缩动作将开口采样器插入月壤,合拢后拔出[19]。
由上述资料可知,基于机械臂末端搭载的表层采样器,具有结构较为简单、采样范围广等特点,广泛应用于星球表层星壤的采样任务中。针对采样器的设计需求,需要重点考虑轻量化、低功耗等需求外,还要尽可能提高任务功能的多样化,实现铲、挖、耙、夹等功能。本文针对表层月壤采样任务需求,提出一种多功能集成的采样器设计方案,通过力学仿真和试验测试验证了方案的可行性,为我国后续的月球采样探测任务奠定基础。
1 采样器方案设计
1.1 设计依据
对于航天工程,需要尽量减小采样器的包络尺寸,简化结构,提升可靠性,由于能量有限,需要做到低功耗和轻量化。航天产品运移所需的代价较大,要最大程度上提高设计的可行性与成功率,要求采样装置具有一定的功能冗余以及较高的环境适应性。
月壤采样器要求能够采集一定量的表层月壤,并将其倾倒入初级封装容器中,并对初级封装容器具有转移能力。月表土壤采样器要求能够进行多次采样,且不出现样品散落现象。末端采样装置在抓取、转移表取初级封装容器过程中,能使初级封装容器保持姿态。能够适应运载发射、地月转移、近月制动、环月飞行、着陆下降、月面工作等过程中的复杂环境。
对于采样器的性能有如下要求:
1)单次采样量——标称月壤状态下,单次获取月球样品的能力不小于150 cm3(密度为1.5g/cm3时)。
2)采样时间——标称月壤状态下,单次完成150cm3铲挖的时间不超过5min。
3)功耗——平均功耗不超过40W。
4)末端采样装置质量不大于3.75kg。
5)转运最大负载能力不小于5kg。
1.2 方案设计
月球表面风化层的土壤密度随深度的增加而增加,如表1所示。表层的月壤采样面对的是比较松散的风化层土壤[20]。对于表层松散月壤,可以采用铲挖的方式获取。为了提高采样器的机动性,将铲挖分为铲取与挖取两个动作。挖取动作如图1所示。首先将铲挖取样器展开,贴近月表,随后铲斗绕定轴转动,运动曲线划过月壤,将月壤挖人容腔内,之后将采样器整体抬起,铲斗与上盖闭合形成封闭容腔。

表1 不同深度月壤的平均密度Table 1 Average density of soil in different depths

图1 采样器挖取月壤样本的动作流程Fig.1 The activity of sampler for digging up the lunar regolith
铲取动作如图2所示。下铲模式是利用下铲铲入风化层,获取月壤。下铲工作开始时,上盖打开,下铲以一定倾斜角度向月表铲去。铲入月壤后,上盖闭合,形成密闭容腔,完成采样。

图2 下铲取工作模式时的动作Fig.2 Mechanical operation of the sampler under working mode of shovel
采样器获得月壤样本后需要将样本转移至初级封装容器,并完成封装容器的转移。完成采样后,采样器将所获样本倾倒入封装容器,并借助采样器本身结构完成对封装容器的转移。采样器提罐过程如图3所示。
图3 采样器提罐过程Fig.3 Lifting jar process of sampler
结合前端机械臂完成所有采样、倾倒及转移工作。采样器工作时序如图4所示。采样器甲(铲式)单个采/放样循环周期为3.5min。
图4 采样器工作时序Fig.4 Work sequence diagram of sampler
1.3 结构设计
末端采样装置位于表取机械臂腕关节末端,采用铲挖的工作形式。通过机械臂动作与采样器配合使用,实现多角度多方位(铲、挖、耙、夹)收集月表上的带黏性(静电)的微尘(月尘)、质感较结实的混合型泥土(月尘+碎石)和纯碎石。
采样器是向上揭盖型斜插式铲挖法采样器,如图5所示。前端由两片钛合金属罩组成,上金属罩的外形呈勾状,边缘部分特意设计成细齿状,方便抓取泥土;下金属罩的外形呈舌状,用来刮除多余样本,下金属罩伸缩运动方向伸出端有限位开关,用于检测下金属罩是否到位,防止取样后月壤样品泄漏。采样器的主体结构为薄壳结构,通过特征化设计和有限元分析实现轻量化和高强度的统一,减少了装配带来的额外质量,但同时也提高了加工难度。
图5 采样器结构Fig.5 Sampler structure
采样器内部传动结构如图6所示,采样器内有两个电机,分别驱动金属爪的弧线运动和金属舌的振动伸缩运动。弧线运动驱动电机通过齿轮组进行减速,并将运动传递至金属爪。振动伸缩运动驱动电机通过丝杠螺母副将旋转运动转换成直线运动并传递至金属舌。

图6 采样器传动机构Fig.6 Driving mechanism of sampler
2 机土耦合动力学仿真
2.1 离散元模型
机土耦合仿真模型采用离散元仿真软件对作业对象月壤颗粒进行仿真。颗粒间的相互作用不仅包括传统的法向、切向力作用,还包括扭转与弯曲的力矩作用,本文建立带扭转、弯曲力矩的颗粒接触碰撞三维离散元模型,如图7所示。图7中,i、j代表发生接触碰撞的两颗粒,Kn为法向接触刚度,Ktw为抗扭转刚度。

图7 颗粒接触碰撞三维模型Fig.7 Particle contact collision model
由于接触平面内的切向、弯曲应变均为平面向量,可将其沿x轴与z轴方向分解,并定义相应的接触刚度。其中,Ksx、Ksz为切向接触刚度,Krx、Krz为抗弯曲刚度,μx、μz为摩擦系数,并且有:

式中:φ为颗粒的内摩擦角。
2.2 月壤模型参数设定
Scott在地面环境、围压53 kPa左右条件下以孔隙比0.87的真实月壤样品与孔隙比0.63的地球土壤做了微型三轴压缩试验进行对比,应力应变曲线如图8所示,地球土壤只有通过增加密实度才能达到与月壤相同的抗剪强度,说明了月壤的高抗剪性。月壤样品的应力应变曲线表明当轴向应变达到7%左右时样品发生屈服,应力差达到峰值200 kPa,以其为参考曲线进行离散元模型的参数标定。
图8 真实月壤三轴试验应力应变曲线Fig.8 Stress strain curve of three axis test of real lunar soil
为实现等效性,需要对仿真中月壤颗粒的性质进行校验,即通过参数匹配得到性质与真实月壤颗粒等效的仿真颗粒。通过对三轴试验曲线的对比,标定离散元仿真参数如表2所示。

表2 月壤离散元模型细观参数Table 2 Macroscopic parameters of lunar soil discrete element model
利用上述标定的细观参数,在53 kPa、78 kPa、103kPa围压下进行3组离散元三轴仿真试验,得到3条应力应变曲线,如图9所示。

图9 不同围压下离散元三轴仿真试验结果Fig.9 Three axis simulation test results of discrete element under different confining pressure
经测算,月壤离散元模型内聚力 c=0.90kPa,内摩擦角 φ =42.25°,满足真实月壤宏观力学性能指标,表明所建立的月壤离散元模型可以代替真实月壤完成采样过程的仿真任务。
2.3 仿真模型的建立
采样器Pro/E模型图如图10所示。直径70mm圆筒分成两部分,一部分作为翻盖或者挖斗,总长200mm,有效挖掘部分100 mm,采样时如采用“铲式”,则该部分作为翻盖,用于封存土样,如采用“挖式”,则该部分作为挖斗,用于挖掘土壤;另一部分为平铲,总长100 mm,采样时如采用“铲式”,则该部分用于铲土,如采用“挖式”,则该部分用于挖掘后将土样铲平封存。
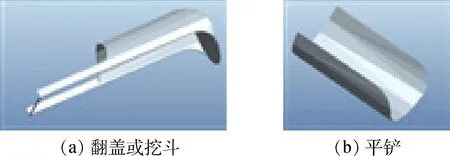
图10 采样器三维模型Fig.10 3D model diagram of sampler
当采样过程中,采样机构进行挖掘操作时,月壤将会受到破坏而变形,产生土拱现象,而为了对月壤受挖掘情况下的运动滑移特性进行模拟,更好地研究挖掘月壤的过程,需对月壤颗粒性态、月壤受力及滑移状态进行可视化仿真,如图11所示。
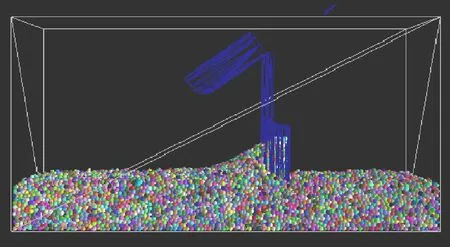
图11 月壤剖面及颗粒可视化Fig.11 Lunar profile and particle visualization
2.4 机土作用仿真
利用离散元仿真软件对铲取和挖取两种工况下的情况进行仿真分析,得到采样器在铲取和挖取工作时,对应的动力学特性。
(1)铲取式工作
采样器采用“铲式”,平铲与月面夹角20°,以10 mm/s的速度向下运动,运动10 s铲进100mm后,翻盖以2(°)/s的角速度合拢,10 s后采样器两部分合拢,之后两部分共同以-2(°)/s的角速度收回,全过程如图12所示。
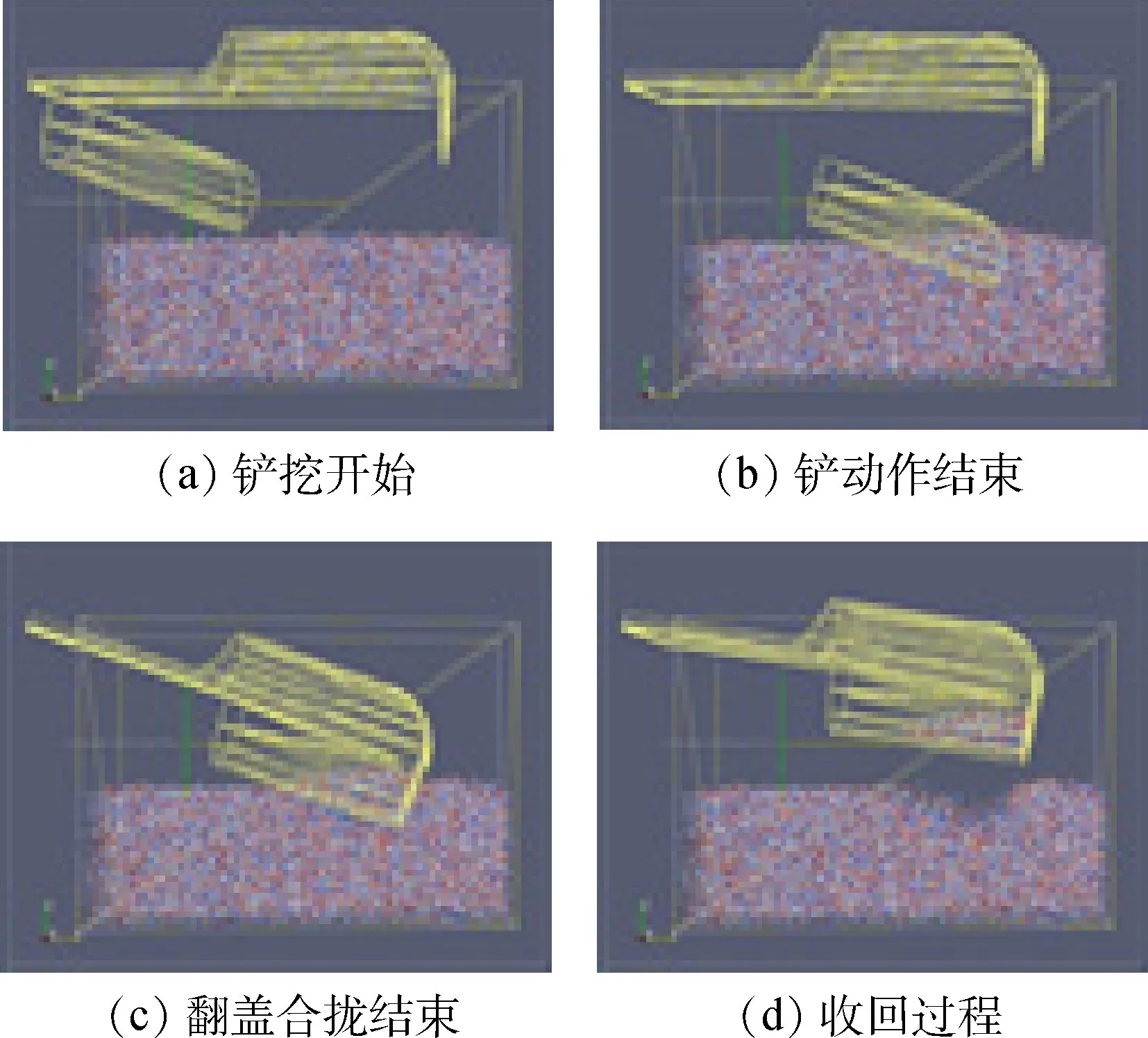
图12 铲取式采样仿真过程Fig.12 Shovel sampling simulation process diagram
铲过程受力分析如图13所示。
铲过程仅平铲部分受力,随铲进过程深入,平铲所受力和力矩逐渐增大,铲进100 mm时受力最大为25N,力矩最大为-2N·m。
合盖过程受力分析如图14所示。
合盖过程翻盖与平铲均受力,翻盖起初未与月壤接触,因此受力为零,接触之后受力快速增加,完全合拢前1 s达到峰值300 N;平铲受力起初保持在25N左右,当翻盖合拢前1 s突然增至峰值-300 N;翻盖与平铲受力相反,在一定程度上相互抵消,从采样器整体来看,起初受力保持在22N左右,即将合拢完毕时采样器受力最大,达到峰值60N,力矩达15N·m。
收回过程采样器两部分合二为一,共同向回转动,此间采样器受力情况如图15所示。采样器从月壤中取出开始时刻,采样器受到内外部月壤作用受力最大,达到峰值38N,力矩-3.5N·m,约1.7 s后完全脱离月表,此时采样器只受内部月壤作用,受力很小,仅在0 N附近振荡,偶尔出现较大峰值,但不超过 5 N,力矩始终保持在0.6N·m附近。
经统计,本次仿真共设置月壤颗粒9 557个,总质量1.848 4 kg,最后采集到样品颗粒946个,样品质量 0.0866kg。
(2)挖取式工作
采样器采用“挖式”,挖斗轴线与月面夹角35°,以 2(°)/s的角速度挖掘月壤,55 s后挖掘完毕,之后平铲以10mm/s的速度将土样铲平封存,全过程如图16所示。
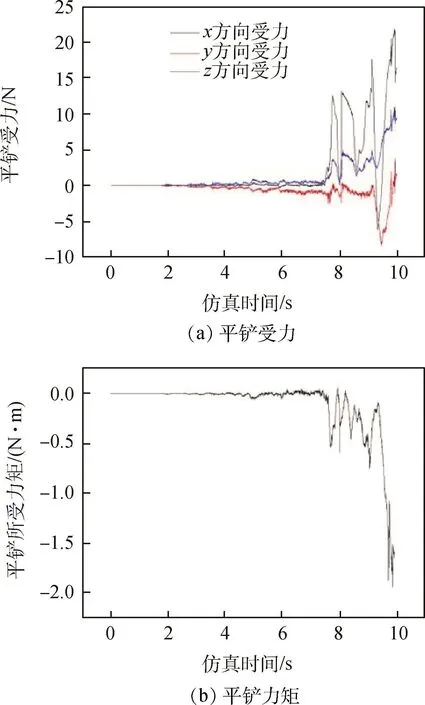
图13 铲过程采样器受力Fig.13 The force of shoveling process
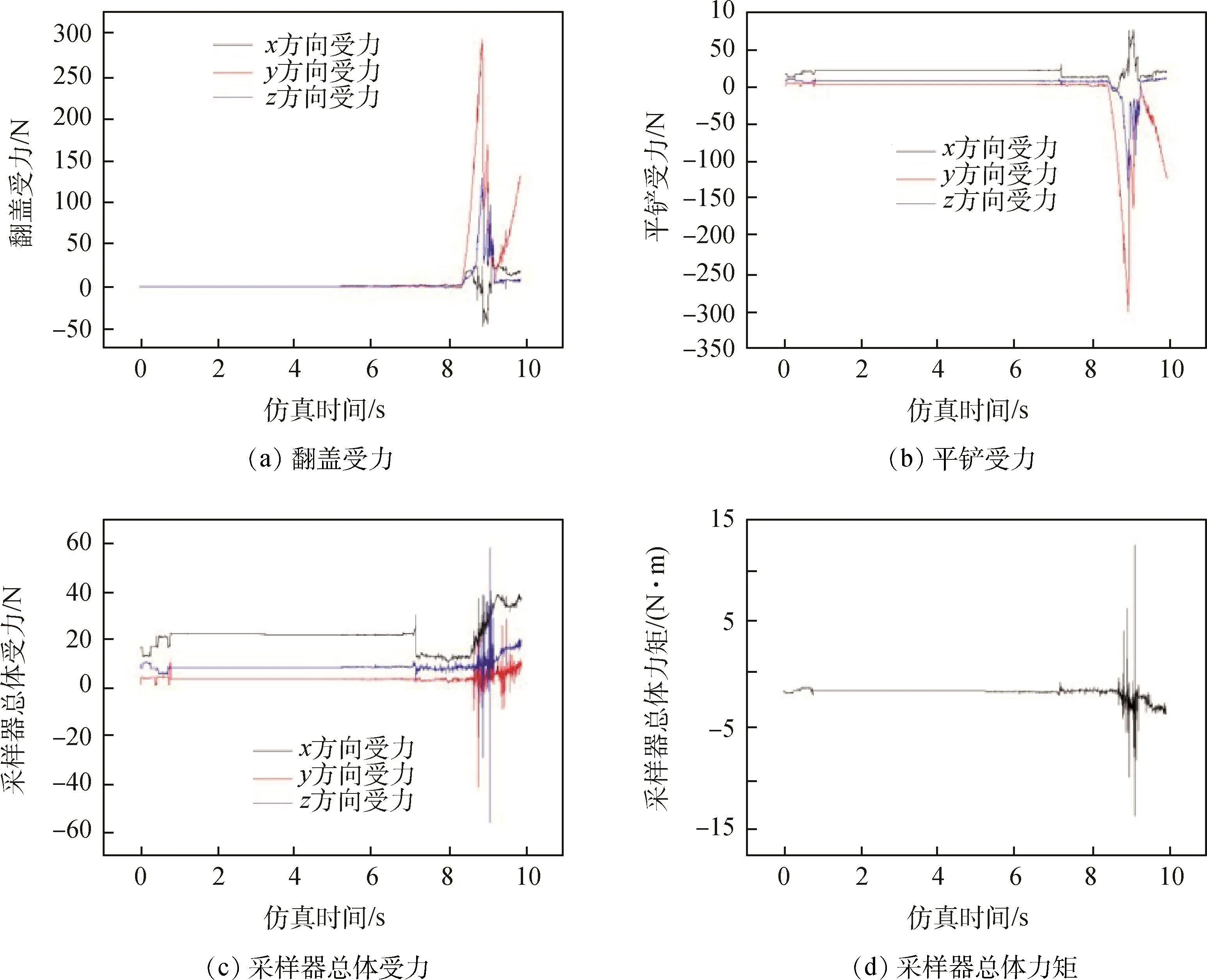
图14 合盖过程采样器受力Fig.14 The force of closing process

图15 收回过程采样器受力Fig.15 The force of recovery process
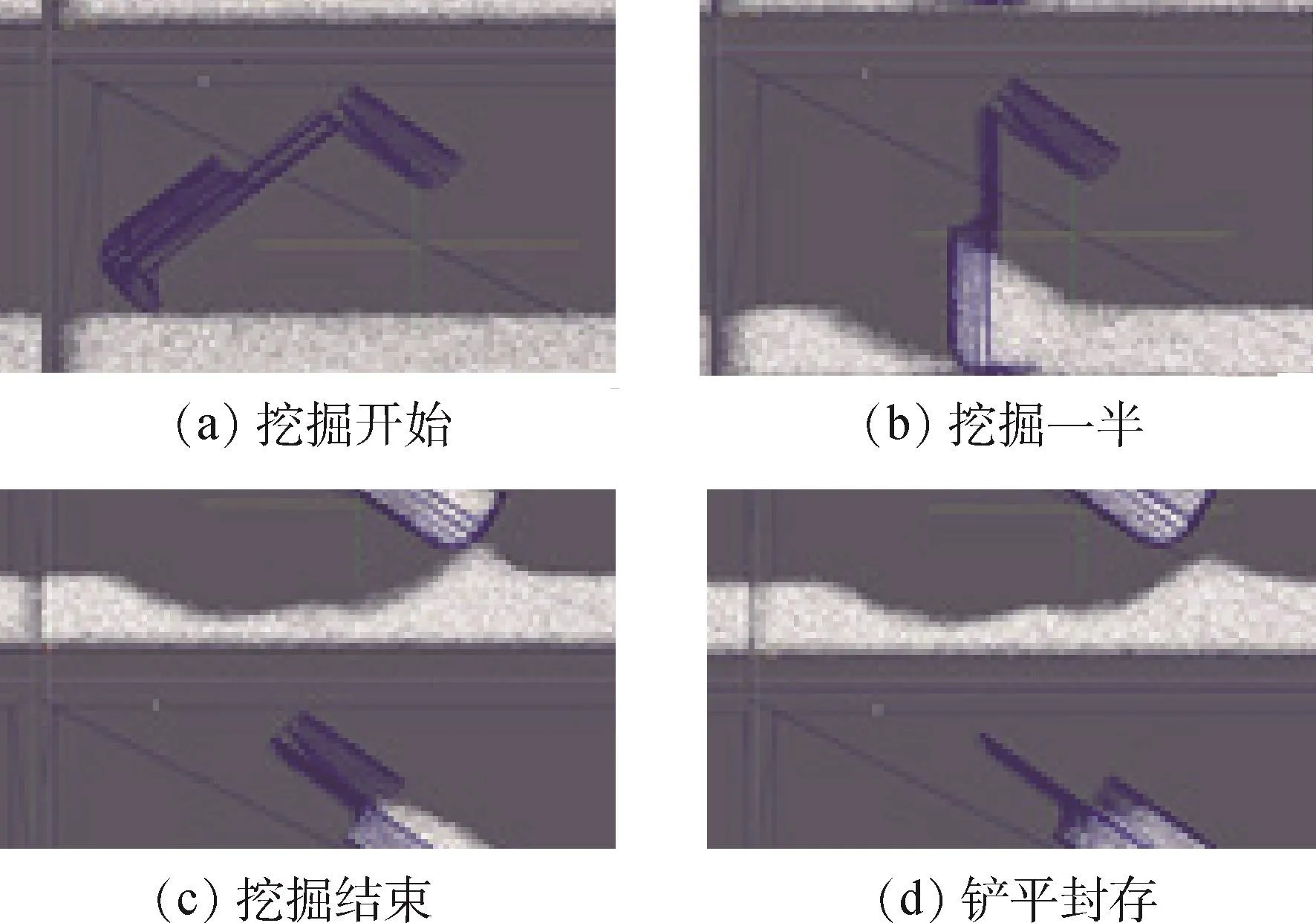
图16 挖式仿真过程Fig.16 Excavating model simulation process
挖过程受力分析如图17所示。
铲过程仅挖斗部分受力,随挖掘过程深入,挖斗所受力和力矩逐渐增大,挖掘至一半左右时受力最大为150N,随后逐渐减小,挖掘结束时挖斗受力为50 N,力矩一直增大至结束前5 s达到最大值-40N·m,随后减小至-20N·m。
如图18所示,平铲与月壤接触前受力为0,接触之后受力逐渐增加,完全合拢时达到峰值220N;挖斗受力起初保持在40N以内,随后略有增大当合拢时突然增至峰值-220N;挖斗与平铲受力相反,在一定程度上相互抵消,从采样器整体来看,受力始终保持在25N以内,力矩在20 N·m范围内,收拢至将近一半时略有增加,力达到50N左右,力矩达到30N·m左右。
经统计,本次仿真共设置月壤颗粒19485个,总质量3.8771kg,最后采集到样品颗粒3422个,样品质量 0.5889kg。
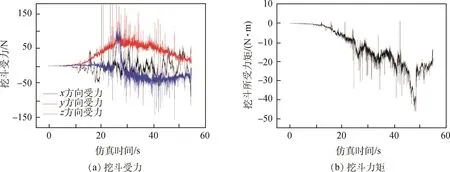
图17 挖过程采样器受力Fig.17 Force of excavating process
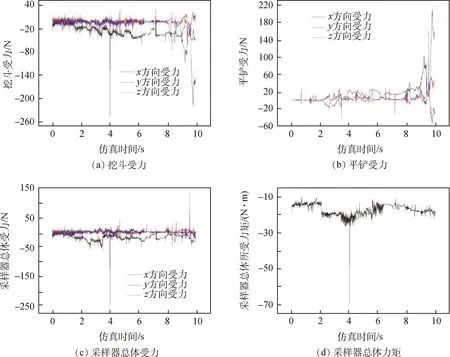
图18 铲平过程采样器受力Fig.18 Force of the shoveling process
3 采样器试验研究
3.1 测试系统
试件为采样器,主要测试设备为采样器性能测试台。采样器性能测试台主要由安装台、6自由度工业机器人组成。测试系统示意如图19所示。
试验对象为3种不同粒径配比的模拟月壤。模拟月壤的配比如表3所示,合计标称质量42.49kg、挑战质量 50.38kg、极端质量 52.82kg。

图19 测试系统Fig.19 Test system
3.2 取样特性
验证采样器对不同硬度月壤适应性,确认采样器功能可靠,及不同硬度月壤下,采样器的取样能力。硬度梯度分为标称、挑战、极端3种,利用采样器对标称、挑战、极端3种类型的模拟月壤开展采样试验。
试验结果如表4所示。从试验数据中可以看出给定电流越大,所能达到的采样深度越大,能获得的月壤的硬度等级越高,最后所得采样量越大。月壤硬度等级越高,采样的难度越大。
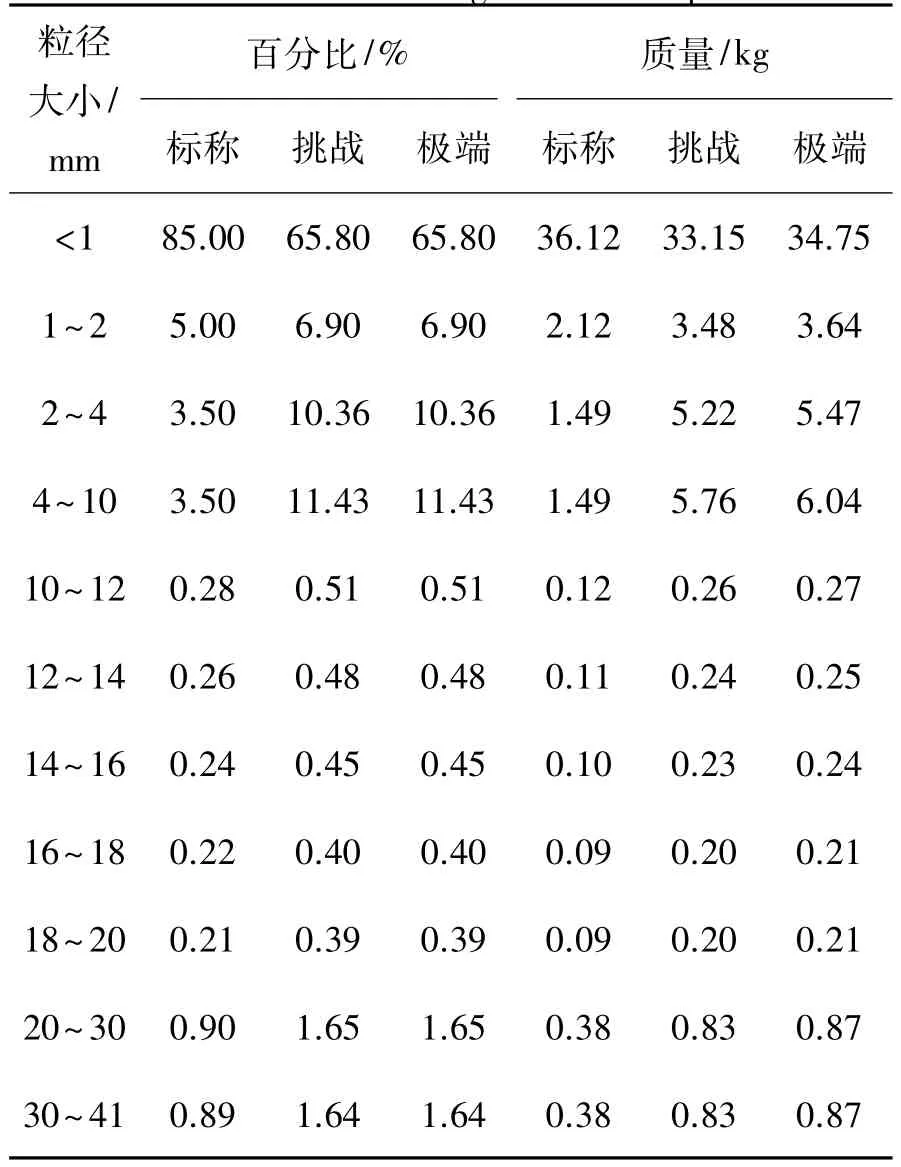
表3 模拟月壤混料参数Table 3 Simulant lunar regolith mixture parameters
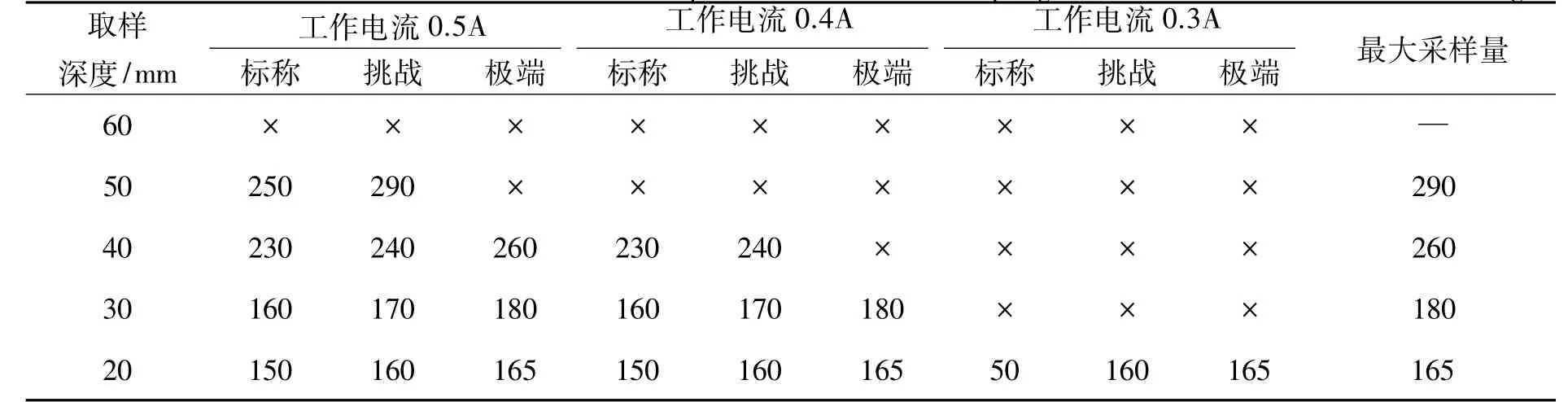
表4 采样试验结果Table 4 Experimental results of sampling g
采样器驱动电压为28V,可以得到单位功率所能采集到的样本与电流和深度的关系如图20所示。
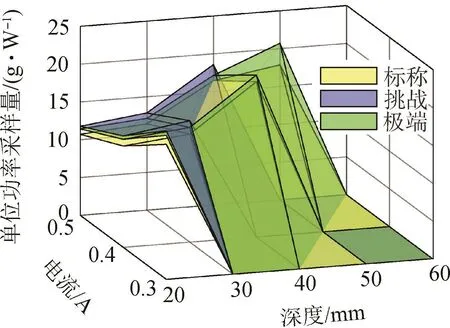
图20 单位功率样本采集量与深度电流关系Fig.20 Relationship between unit power sample collection and deep current
随深度增加,单位功率获得采样量增加,在深度达到60mm时,采样能力到达极限,发生堵转现象,采样失败。3种硬度模拟月壤下的单位功率采样量随深度与电流的变化趋势相一致,硬度越大单位功率采样量较大。随驱动电流的增大,单位功率采样能力变化不明显。
4 结束语
针对月面表层的采样任务,设计了一种铲挖式采样器,并设计了相应的采样动作,进行了仿真分析和试验验证。
1)对采样器的采样能力进行了分析,利用离散元数值仿真手段,对采样器进行了机土耦合仿真,对其工作能力进行了初步确认。
2)建立月表采样试验系统,测试了采样器在不同驱动能力下所能所得的样品深度、样品硬度及采样量的情况。
本文的研究工作可为中国未来的月面采样任务提供方案借鉴和技术支撑。
猜你喜欢
军事文摘(2022年18期)2022-10-14
小哥白尼(趣味科学)(2022年6期)2022-08-17
新视线·建筑与电力(2021年2期)2021-09-10
青少年科技博览(中学版)(2021年11期)2021-03-07
北京航空航天大学学报(2020年10期)2020-11-14
直升机技术(2020年2期)2020-06-16
山东青年(2016年12期)2017-03-02
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
中学生数理化·八年级物理人教版(2014年2期)2014-04-02
中学生数理化·八年级物理人教版(2014年2期)2014-04-02
