工业机器人驱动系统非线性频谱故障诊断方法
2019-04-04 07:38陈乐瑞曹建福王晓琪
西安交通大学学报 2019年4期
陈乐瑞,曹建福,王晓琪
(西安交通大学机械制造系统工程国家重点实验室,710049,西安)
在众多工业机器人故障中,驱动系统故障占比较大。由于驱动系统是动力来源,同时又十分隐蔽,因此驱动系统故障成为影响机器人安全运行的最大隐患。如何准确、高效地诊断出驱动系统的故障,是机器人故障诊断研究的关键。
目前,许多学者在机器人故障诊断方面做了大量研究工作。现有的故障诊断方法大致分为:基于数学模型方法、基于信号处理的方法和基于知识的方法。基于数学模型故障诊断方法是建立对象精确模型、分析模型输出与测量之间的残差来实现故障诊断的,适合于数学模型比较精确的系统,如果模型不精确、测量信息中含有噪声,诊断准确率将会受到影响[1-4];基于信号处理的方法是利用系统输出信号或者状态的某些特征量,例如幅频特性量、相关函数或频谱等进行故障诊断的,当测量信号出现如奇异数据、频率变化等现象,就认定系统发生了故障,虽然避免了数学建模,但是当信号故障特征不明显时,该方法会出现漏诊和误诊问题[5-8];基于知识故障诊断是一种基于知识或学习的新型智能故障诊断方法,具有自学习、自组织和自推理能力,通过利用领域专家知识提高故障诊断正确率,常用的方法有基于专家系统故障诊断方法、基于神经网络故障诊断方法和基于支持向量机故障诊断方法[9-12]。基于非线性频谱特征提取故障诊断是一种新型故障诊断方法,通过获取对象频谱特性并对频谱特性进行分析,判断系统是否处于故障状态,该方法充分利用了系统非线性特性,具有诊断准确率高、鲁棒性强特点,人们利用该方法对电动机、数控装备和航天发动机进行了故障诊断研究[13-16],但是到目前为止,还未见利用非线性频谱分析方法对工业机器人进行故障诊断方面的研究。
由于非线性频谱分析方法中广义频率响应函数(GFRF)的辨识模型结构复杂而且计算量大,所以本文采用结构简单、计算量小的非线性输出频率响应函数[17](NOFRF)对系统进行频谱分析。首先介绍了NOFRF理论,给出辨识算法;然后建立工业机器人驱动系统非线性模型,分析正常情况与故障情况的非线性频谱特征;最后,利用KPCA和SVM方法进行故障识别和分类。
1 基于NOFRF的故障特征提取及辨识方法
1.1 基于NOFRF的故障特征提取
假设一个非线性系统的输入为u(t),输出为y(t),则输出的Volterra级数的时域表达式为
(1)
式中:yn(t)为非线性系统第n阶输出;hn(τ1,τ2,…,τn)为非线性系统第n阶Volterra时域核;N为非线性系统最高阶次;τ为时延。对n阶Volterra时域核hn(τ1,τ2,…,τn)进行多维傅里叶变换可得广义频率响应函数(GFRF),即
Hn(jω1,jω2,…,jωn)=
(2)
因此,非线性系统输出频域表达形式为
(3)
(4)
式中:Yn(jω)为非线性系统第n阶输出频率响应;U(jωi)为输入傅里叶变换。
GFRF反映了非线性系统固有的属性,通过分析不同状态下GFRF频谱特征值的变化,可以实现系统故障的诊断与识别,但是GFRF模型结构复杂,对其求解所需计算量庞大,这会影响诊断的实时性。因此,为了降低求解函数时的计算量、提高非线性频谱特征获取的实时性,Lang等提出非线性输出频率响应函数(NOFRF),其定义如下
Gn(jω)=
(5)

(6)
从式(6)可以看出,非线性输出频率响应函数跟线性系统频率函数相似,即NOFRF是线性系统输出频率响应函数Y(jω)=G(jω)U(jω)的延拓;另外,与广义频率响应函数(GFRF)是多维函数的特性相比,NOFRF各阶函数值都是一维的,因此在进行各阶NOFRF值估计过程中,可以有效避免维数灾难发生。
1.2 NOFRF的辨识
根据文献[18],用输入信号Aiu*(t)激励系统M次,其中i=1,…,M,M≥N,Ai是常数,且AM>AM-1>…>A1>0,u*(t)为随时间变化信号,频域信号为U*(jω),系统得到M次输出频谱,记为Yi(jω),i=1,…,M,则
(7)
式中:Yi(jω)=[Y1(jω),…,YM(jω)]T;

(8)
对G*(jω)的辨识实质是最小二乘问题,如果直接对式(8)进行求逆计算量较大,本文采用变步长最小均方自适应辨识算法[16]进行辨识。获得非线性系统的频谱值后,提取非线性频谱特征;然后利用KPCA方法对高维非线性频谱进行压缩、降维;最后利用正常与故障频谱特征数据对SVM分类器进行学习训练,实现故障识别与分类。非线性频谱故障诊断具体过程如图1所示。

图1 非线性频谱故障诊断流程
2 机器人驱动系统非线性频谱分析
工业机器人驱动系统大多采用无刷直流电机,其数学模型[19]表示为
(9)
式中:id(t)为定子绕组电流直轴分量,为系统输入;ω(t)为转子转速,为系统输出;r为定子绕组电阻;kp为电流比例调节器增益;ks为逆变驱动电路等效增益;kg为电流反馈系数;J为转子转动惯量;L为定子绕组电感;B为转子摩擦阻尼系数;φg为转子磁链过定子绕组的磁链;Tl为负载转矩。
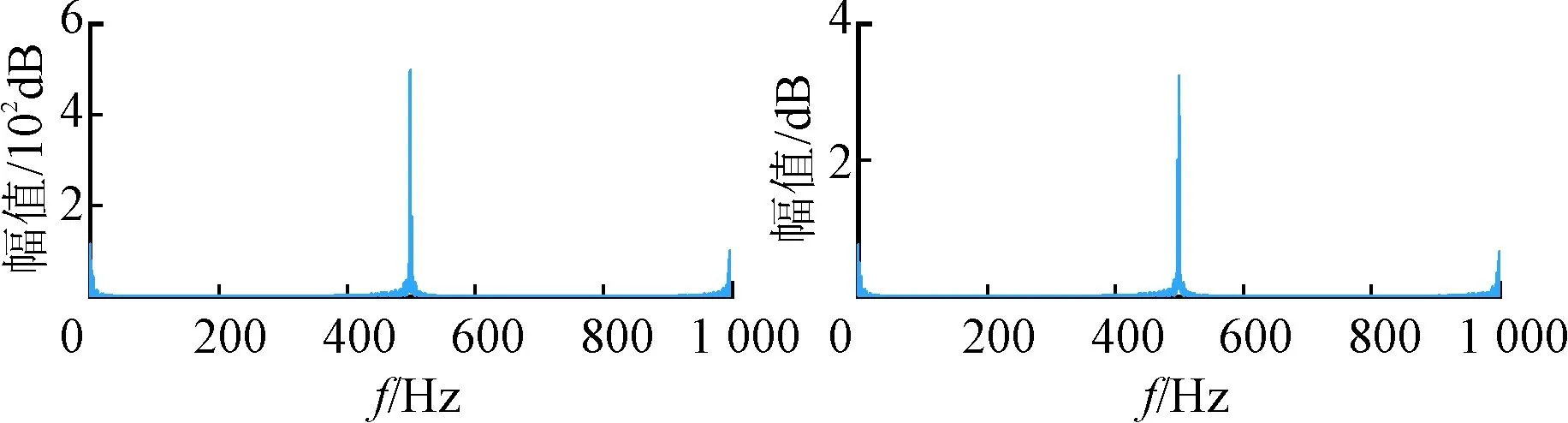
在工业机器人长期工作过程中,经常会发生发热和润滑不良故障,在参数上表现为r增大和B增大。某直流电机系统正常情况下参数为r=4 Ω,kp=ks=kg=1,Tl=5 N·m,L=0.005 H,φg=0.186 Wb,J=1.5×10-6kg·m2,B=2×10-5N·m·s/rad。假设当发生热故障时,电阻r增大到6 Ω;当发生润滑不良时,摩擦系数B增大到4×10-5N·m·s/rad。选择激励信号id(t)=Ancos(πt),n=1,2,3,4,且A1=20,A2=40,A3=60,A4=80,选择采样频率为1 000 Hz,采用NOFRF对工业机器人驱动系统的输入和输出信号进行分析,考虑到4阶以上频率成分能量很小,因此本文只考虑系统的前4阶频谱输出。根据前面的辨识理论,在正常情况、发热和润滑不良3种情况下的第1~4阶NOFRF辨识结果分别如图2~4所示;同时,为了对比NOFRF和GFRF两者的计算复杂度,本文采用递推方式求出GFRF频谱,仅考虑前2阶GFRF频谱,其结果如图5~7所示。
从图2~图4中提取各阶NOFRF频谱的峰值分布的情况见表1。

(a)1阶NOFRF频谱(b)2阶NOFRF频谱
(c)3阶NOFRF频谱(d)4阶NOFRF频谱图2 正常情况下前4阶NOFRF非线性频谱

(a)1阶NOFRF频谱(b)2阶NOFRF频谱

(c)3阶NOFRF频谱(d)4阶NOFRF频谱图3 发热故障的前4阶NOFRF非线性频谱

(a)1阶NOFRF频谱(b)2阶NOFRF频谱

(c)3阶NOFRF频谱(d)4阶NOFRF频谱图4 润滑不良故障的前4阶NOFRF非线性频谱

(a)1阶GFRF频谱(b)2阶GFRF频谱图5 正常情况下前2阶GFRF非线性频谱

(a)1阶GFRF频谱(b)2阶GFRF频谱图6 温度升高故障的前2阶GFRF非线性频谱

(a)1阶GFRF频谱(b)2阶GFRF频谱图7 润滑不良故障的前2阶GFRF非线性频谱
通过对以上非线性频谱分析发现:电机的不同状态(故障)对应的前4阶NOFRF值差别很大;同一种状态对应的NOFRF值随着阶次增大,其幅值逐渐减小。正是由于不同状态(故障)在非线性频谱上存在差异性,所以可以用基于NOFRF的方法进行故障特征提取与诊断。

表1 不同状态下各阶NOFRF频谱峰值分布
从图5~7可以看出,不同状态(故障)之间频谱特征值差异比较明显,虽然也可以作为故障特征进行提取,但是与NOFRF明显不同的是GFRF中2阶及以上频谱皆是多维的(维数等于阶数),这样会增加GFRF频谱辨识过程中的计算量,另外,多维变量的物理意义也没有一维变量直观明确。
3 故障诊断实验
对工业机器人驱动系统每种状态的每阶核函数随机取样,采样频率为1 000 Hz,每阶NOFRF取频点为f、2f、3f、4f、5f、6f、7f、8f、9f、10f,基频f=100 Hz,将这10个频域点幅值作为分析对象,那么4阶NOFRF总共40个值,则提取到的特征矢量为40维,其采样结果见表2。另外,为了比较NOFRF和GFRF在特征提取实时性方面的差异性,对比实验中GFRF辨识算法提取到的特征矢量也是40维,基于NOFRF和GFRF特征提取的时间曲线如图8所示。随后,对电机每种状态仿真100次,前60次仿真结果用于SVM分类器训练,后40次结果用于测试,采集的结果首先利用文献[20]中KPCA方法进行数据维数的压缩,达到降维的目的,经计算前3个主元累计贡献率达到96.72%,将压缩之后的数据送往SVM分类器进行故障模式识别,其诊断结果见表3。SVM分类器采用一对多形式,核函数采用高斯径向核函数,核函数参数σ=1,惩罚因子c=0.1。

图8 特征提取时间对比
从表2、表3可以看出,采用基于NOFRF的频谱分析方法对工业机器人驱动系统进行故障诊断得到的故障识别准确率很高;从图8可以看出,在50次实验过程中,基于GFRF方法提取故障特征耗时较长,平均为712 ms;而基于NOFRF方法提取故障特征耗时较短,平均为104 ms。特征值提取耗时多少反映了算法计算量大小和难易程度,本文中这两种算法实时性差异较大,其根本原因在于GFRF辨识模型复杂,多维函数计算难度大,而NOFRF是一维函数,计算难度较小。由此可见,在利用非线性频谱分析方法对故障进行诊断时,与基于GFRF的方法相比,基于NOFRF的方法可以节约85.4%时间,因此更能满足工业机器人驱动系统故障诊断对实时性的要求。

表2 各种状态前4阶非线性频谱特性数值

表3 基于SVM的诊断结果
4 结 论
针对工业机器人驱动系统非线性特点,首先,采用基于NOFRF的非线性频谱特征提取方法来获取驱动电机的高维故障特征频谱数据;然后,通过KPCA方法对高维故障特征进行压缩,降低变量之间的非线性度,最后通过SVM分类器实现了故障类型的精确诊断。仿真实验表明,该方法具有实时性好、识别准确率高的特点,适合推广到航天发动机、高铁车轮等零部件的故障诊断。
猜你喜欢
空间科学学报(2021年6期)2021-03-09
电子制作(2019年15期)2019-08-27
电子制作(2018年19期)2018-11-14
消费导刊(2018年8期)2018-05-25
制造技术与机床(2017年8期)2017-11-27
演艺科技(2017年3期)2017-05-03
自动化学报(2017年11期)2017-04-04
人民音乐(2016年3期)2016-11-07
空间控制技术与应用(2015年2期)2015-06-05
电子技术与软件工程(2015年6期)2015-04-20