自动泊车系统泊车轨迹跟踪研究
2019-04-18 07:55赵海龙崔巍杨盼盼
汽车实用技术 2019年7期
赵海龙,崔巍,杨盼盼
自动泊车系统泊车轨迹跟踪研究
赵海龙,崔巍,杨盼盼
(华晨汽车工程研究院,辽宁 沈阳 110010)
汽车工业的发展给人们带来了极大便利,但随着汽车保有量的不断提升,城市规划已无法适应汽车数量的飞速增长,停车缺口巨大,停车难问题愈加严重,自动泊车系统的出现很好的解决了城市停车难问题,较大的提升了车辆的安全性及舒适性。自动泊车主要分为三个阶段,即障碍物识别、路径规划、车辆控制。而路径规划的过程主要受到车辆的自身参数及相关环境信息两个因素影响,汽车自身参数主要包括车长、车宽、车高、轴距、最小转弯半径等,周边环境信息主要包括车位的位置、车位的大小、泊车起始位置,及周边的障碍物位置等。当汽车设计出来后,其车身的各项参数也就随之确定,因此文章主要研究内容为路径规划过程中的车辆轨迹跟踪问题,通过车辆运动学建模及阿克曼转向几何对车辆进行建模分析,以掌握车身关键点的坐标信息、车辆的实时运动状态及趋势。
自动泊车;路径规划;轨迹跟踪;运动学建模;阿克曼转向原理
前言
近几年,随着经济的持续发展和人们生活质量的不断提高,人们对汽车的需求量越来越大,导致汽车的保有量逐年攀升,截至2017年底,我国私家车保有量已达1.46亿辆,占到了全部汽车保有量75%,同比增长了18%。可以看出目前私家车体量巨大,且为目前城市的主要交通工具,城市在停车位的规划上已无法适应汽车数量的快速增长,导致目前城市停车位缺口巨大。2017年我国城市的停车位缺口已达50%,这个缺口率还在逐年增长,城市停车困难的问题已经愈演愈烈,停车空间紧张,停车环境复杂,给需要停车的驾驶员造成了非常大的困扰。停车难已经是各大城市需要面对的主要交通问题,因此自动泊车系统已经成为目前各大整车厂的研发趋势。
自动泊车系统主要包含3个阶段,即障碍物识别、路径规划以及车辆控制。
障碍物识别即依靠超声波传感器探测车辆周围环境信息,并反馈给自动泊车控制器,控制器根据相关数据判断车位的位置、大小等信息。
路径规划是自动泊车过程中的技术难点,也是各大厂商的研究重点。路径规划首先需要对汽车运动学进行建模,确定车辆的实时行驶轨迹,以及每一时刻车身相关点的坐标信息,控制器根据车辆位置坐标及周边环境信息进行泊车路径的规划。路径规划过程中车辆建模是一个最主要的环节,也是本文的主要研究方向。
车辆控制即自动泊车控制器进行相关的车辆行驶即刹车等控制,自动泊车系统将相关控制信号通过CAN总线发动给各个执行器,执行及根据相关信息控制车辆进行泊车运动,已完成自动泊车过程。
1 车辆运动学建模
针对当前市场上两驱汽车,一般汽车前轮为转向轮,后轮为驱动系统即驱动轮,根据其进行运动学建模,可简化为下图1所示,当车辆在进行泊车过程时,是一个低速运动过程,一般泊车过程车速都控制在10Km/h以内,在此种情况下可以认为车辆在次理想状态下车轮只存在滚动,不存在滑动。在这个模型中只需要考虑汽车运动学而忽略汽车动力学。
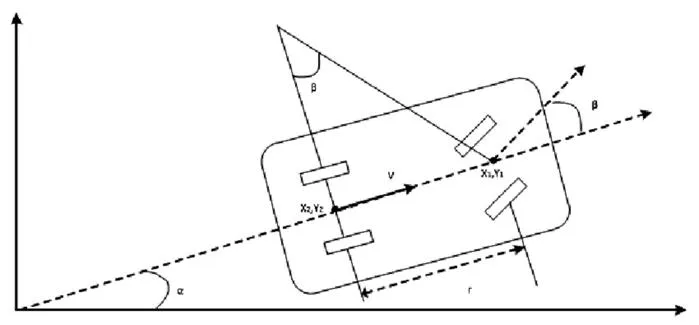
图1 汽车运动学建模
图1中,在自建的X-Y坐标系中,汽车简化为用一矩形表示,车辆的四个轮胎分别用四个矩形的小方框代表,其中右侧的两个前轮是车辆的转向轮,左侧的两个后轮为车辆的驱动轮,则两个后轮的方向将永远与车辆方向保持一致,两个前轮随着方向的转动而转动,上图中的相关参数定义如下所示:
α:车辆的中心线与坐标系X轴的水平方向夹角,设逆时针方向为正值;
β:车辆的转向角,设顺时针方向为正值;
r:车辆前轴的中心到后轴中心的距离,即轴距;
v:车速;
(x1,y1):车辆前轴中心坐标;
(x2,y2):车辆后轴中心坐标。
上图的汽车运动学模型符合非完整约束条件,可用公式表示如下:

由于汽车的两个前轮及两个后轮都是分别通过曲轴连杆进行连接的,因此(x1,y1)、(x2,y2)的关系可以用公式表示如下:


对式(2)及(3)的时间求导可得:


将(4)及(5)式带入(1)式可得:

由图1,可得:


将(7)及(8)式带入(6)式,可得:
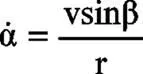
由以上(7)和(8)及(9)式,基于前轴中心店的汽车运动学方程式如下:
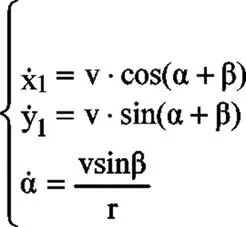
本文将低速行驶状态的车辆看作是一个运动的刚体,车辆的两个后轮永不随方向盘的转动而转动,始终与车身方向保持一致,故车辆的两个后轮的运动过程能够代表车辆自身的运动轨迹,所以可将车辆的后轴中心点(x2,y2)作为车身坐标。在图1的自建X-Y坐标系中,车辆的运动轨迹可以用(x2,y2,α)坐标表示,为了下文方便计算,下文中将使用(x,y,α)来代替。即车辆行驶轨迹变化的控制变量为(x,y,α),直接控制的输出量为β。
综上所述,对于前轮为转向轮,后轮为驱动轮的汽车,将(4)及(5)式带入(10)式可得车辆的连续运动学方程式为:
结合实际运用,在实际车辆中可以通过CAN总线得到轮速脉冲信号,即可以得到车辆在给定时间内的运动量,根据(11)式,在给定的时间内,可以求得:

通过上面的分析,每次用一个迭代的方式,给出一个较小的位移S,根据上式(11)就可以计算出在任何时刻,汽车的车身位置水平轴和X轴的夹角α;同时根据上式(12),可以计算出在每个ΔS时刻,Δx和Δy,因此,可以知道任何时刻汽车后轴中心点的具体坐标。
2 转弯半径计算
阿克曼转向原理是由德国的工程师Lankensperger提出的,主要是一种为解决四轮转弯过程中,两侧转向轮所行驶轨迹的圆心不重合问题的几何学。依据阿克曼转向理论,需要假设以下前提:车辆的前轮定位角为零,整个车辆为刚性且行驶过程中不受任何侧向力的作用。
当车辆进行转弯行驶时,车辆的转向机构能够使内侧轮胎比外侧轮胎的转向角大2~4度,已达到让车辆的四个轮胎行驶的轨迹的圆心大概交于同一点,且此点位于后轴延长线上。
将车辆的泊车过程简化为刚体运动后,基于阿克曼转向几何建立车辆转向运动模型,计算车辆的转弯半径,如图2所示。

图2 阿克曼转向几何
上图中的相关参数定义如下:
γ:代表车辆转向内侧前轮的转向角;
β;代表车辆转向外侧前轮的转向角;
ψ:方向盘转角。
根据阿克曼转向几何车辆的转向内侧前轮转向与外侧前轮转角与方向盘转角存在如下关系:
根据上图可得:

由上式(14)得:
由上式(15)可知车辆的最小转弯半径与车辆的轴距及方向盘转角有关,车辆的轴距为固定值,所以当方向盘转角处于最大时,车辆有最小转弯半径,再根据上式(15)即可计算出车辆的最小转弯半径R。
3 车身上各个关键点的轨迹
汽车的自动泊车过程主要受到车辆的自身参数及相关环境信息两个因素影响,汽车的自身参数主要包括车长、车宽、车高、轴距、最小转弯半径等,周边环境信息主要包括车位的位置、车位的大小、泊车起始位置,及周边的障碍物位置等。当一辆汽车设计出来以后,其车身的各项参数就随之确定,具体参数如下表1所示。
表1 车身参数

表2 车身各个关键点的坐标

4 结论
本文主要以自动泊车过程中的路径规划为切入点,研究路径规划过程中的车辆运动轨迹跟踪问题,通过对前轮转向、后轮驱动的汽车进行运动学建模,得出车身的坐标信息,并结合相关的车辆参数即可计算出泊车过程中车身关键点的坐标信息。基于阿克曼转向原理,计算出车辆的转弯半径与方向盘转角关系。则自动泊车系统可以通过以上信息实时跟踪车辆的位置及运动趋势,进行泊车路径的规划。
[1] 赵春晖,周晓晴.唤醒“沉睡”的城市停车位资源[J].走向世界,2018 (5).
[2] 于栋,沈峥楠.自动泊车系统关键技术及应用分析[J].汽车实用技术,2016(3):103-105.
[3] 自动泊车系统路径规划与跟踪控制研究[D].湖南大学, 2014.
[4] Gruyer D, Choi S, Boussard C, et al. From virtual to reality, how to prototype, test and evaluate new ADAS: Application to automatic car parking[C]// Intelligent Vehicles Symposium. 2014.
[5] Jung H G, Lee Y H, Kim J. Uniform User Interface for Semiautoma -tic Parking Slot Marking Recognition.[J].IEEE Transactions on Vehicular Technology, 2010, 59(2):616-626.
[6] 刘涛,邱方长,李林杰,等.汽车最佳泊车路径的规划设计[J].硅谷, 2013(7):184-184.
[7] 邹传伍,周瑞浩,马彪.基于超声波的全自动平行泊车路径规划[J]. 现代制造,2017(33):11-12.
Research on tracking the parking track in automatic parking system
Zhao Hailong, Cui Wei, Yang Panpan
(Brilliance Auto R&D Center, Liaoning Shenyang 110010)
The development of the automobile industry has brought great convenience to people, but with the continuous increase of car ownership, urban planning has been unable to adapt to the rapid growth of the number of cars, the parking gap is huge, and the problem of parking is even more serious. The appearance of the automatic parking system has solved the problem of urban parking and greatly improved the safety and comfort of the vehicle. Automatic parking is mainly divided into three phases, namely obstacle identification, path planning, and vehicle control. The process of path planning is mainly affected by the vehicle's own parameters and related environmental information. The vehicle's own parameters mainly include the length, width, height, wheelbase, and minimum turning radius. The surrounding environment information mainly includes the location of the parking space, the size of the parking space, the starting position of the parking space, and the location of the surrounding obstacles. When the car is designed, the parameters of its body are also determined. Therefore, the main research content of this paper is the problem of vehicle trajectory tracking in the path planning process. The vehicle modeling is modeled and analyzed by vehicle kinematics modeling and Ackermann steering geometry. In order to master the coordinate information of the key points of the vehicle body, the real time motion state and trend of the vehicle.
auto parking; Path planning; Track tracking; Kinematics modeling; Ackermann steering principle
U471.1
B
1671-7988(2019)07-35-04
赵海龙,学士学位,助理工程师,就职于华晨汽车工程研究院,研究方向:汽车电子。
U471.1
B
1671-7988(2019)07-35-04
10.16638/j.cnki.1671-7988.2019.07.011
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
汽车实用技术(2022年16期)2022-08-31
汽车实用技术(2022年7期)2022-04-20
内燃机与配件(2022年2期)2022-01-17
冰雪运动(2020年5期)2020-03-29
小猕猴智力画刊(2019年8期)2019-09-12
小学生学习指导·爆笑校园(2019年6期)2019-09-10
新高考·高一物理(2016年1期)2016-03-05
红蜻蜓(2015年11期)2016-02-02
中国自行车·骑行风尚(2014年4期)2014-10-10