
基于独立组件的雷达对抗模拟训练评定系统设计
2019-04-27 02:29万红坡
舰船电子对抗 2019年6期
万红坡,朱 丽
(解放军91336部队,河北 秦皇岛 066326)
0 引 言
模拟训练,就是通过仿真手段模拟真实训练环境,供操作手在此环境中训练,以达到熟练操作的活动。
现阶段,雷达对抗装备不断更新,而具有装备熟练操作技能的操作手需求也在不断增加,与之相适应的模拟训练也在迅速增多,但现有的评定设备存在评定对象单一、评定扩展困难、评定模式单一的问题,无法满足多种对抗装备、多种科目的模拟训练结果的评定迫切需求。
为了适应这种需求,本文设计了一种新型的训练评定系统,此系统将众多的评定对象设计为独立组件,在训练中通过灵活的组合,满足雷达对抗设备训练评定的需求,为实现装备操作手多样化模拟训练的结果评定奠定基础。
1 独立组件设计
独立组件是一种软件结构[1-2],它为软件的动态架构提供了基本材料。独立组件的构成如图1所示。

图1 独立组件构成图
(1)通过组件基础类描述某一类型的评估对象,例如雷达侦察装备类,此基础类定义了评估对象的公共特性,是拓展具体对象的基础。
(2)组件描述文件是具体对象的特征和行为表述,通过读取描述文件,并配合组件基础类,形成完整的具体对象表述。
(3)具体组件n是实现评定工作的基础。它包含输入/输出接口、评定数据转换、评定参数读取等功能。当有新的评估组件加入时,只需按照组件描述文件格式创建新的描述文件即可。
由此可见,独立组件具有通用性和强扩展性的特点。
2 训练评定系统组件构成
训练评定系统涉及了模拟训练所需的多种平台(舰载、岸基、弹载、机载)的多种型号雷达对抗设备,并为每型设备设计了基础组件和组件描述文件,同时后续可通过扩展获得更多的独立组件。
所有组件均具有编辑功能,可添加或删除某些评定项目。
2.1 侦察机独立评定组件
设计目标:按照接口描述文件,对组件进行配置,明确此评定组件的型号类别,即与特定评定对象(对应型号的雷达侦察实装或者模拟训练设备)实现关联,同时,还需根据训练需求,设定评定指标,设置指标参数:威胁目标截获率rc、威胁目标识别率ri和威胁目标截获时间Tc,最终计算侦察效能C作为侦察操作手的训练能力评定结果:
C=Wrc×rc+Wri×ri+Wtc×Tc
(1)
式中:Wrc、Wri、Wtc分别为威胁目标截获率、威胁目标识别率和威胁目标截获时间的权系数,即重要度,且:
Wrc+Wri+Wtc=1
(2)
在模拟训练时,操作手的侦察活动由侦察机独立评定组件进行记录,在训练结束时按照评定指标计算评定结果。
2.2 有源干扰机独立评定组件
设计目标:按照接口描述文件,设置为特定型号的有源干扰评定组件,并配置此型号有源干扰机的干扰类型、各干扰类型在实施干扰时的操作步骤和干扰时长。同时,根据训练需求,结合有源干扰实施步骤及干扰准则,设定评定准则,确定评定指标参数:干扰引导准确性rj、干扰样式准确性rst和干扰引导时间Tj,最终计算干扰效能J作为操作手的干扰训练能力评定结果:
J=Wrj×rj+Wrst×rst+Wtj×Tj
(3)
式中:Wrj、Wrst、Wtj分别为干扰引导准确性、干扰样式准确性和干扰引导时间的权系数,即重要度,且:
Wrj+Wrst+Wtj=1
(4)
在模拟训练时,操作手的有源干扰引导信息和干扰操作信息被有源干扰机独立评定组件获取并记录,在训练结束后,对有源干扰进行评定。
2.3 无源干扰机组合评定组件
设计目标:根据接口描述文件,将独立组件配置为特定型号的无源干扰评定组件,并按照此型号无源干扰机的干扰类型以及干扰操作流程,对评定组件设定。同时,根据训练需求,设定评定准则,确定评定指标参数(参见公式(3)和公式(4))。
在训练过程中,评定组件接收无源干扰评定原始数据,包含干扰对象的干扰目标信息、干扰操作信息、无源干扰的类型等,结合有源干扰实施步骤及干扰准则,对有源干扰进行评定。
2.4 雷达对抗设备组合评定组件
设计目标:对特定型号的雷达对抗设备,按照其实际的功能组成,设计组合组件描述文件,形成具备系统评定能力的组合组件。
该组合组件不但能够完成内部各个独立组件的评定,还能够对装备操作手进行综合评定,评价其雷达对抗综合能力T:
T=Wc×C+Wja×Ja+Wjp×Jp
(5)
式中:Wc、Wja、Wjp分别为侦察效能、有源干扰效能和无源干扰效能的权系数,即重要度,且:
Wc+Wja+Wjp=1
(6)
设计完成后的组合组件可以进行保存,在后续训练中可直接调用,大大简化了评定流程,提高了评定效率。
3 训练评定系统设计
下面以某型雷达对抗装备为例详细表述独立组件的设计。
(1)对该雷达对抗装备进行编号,由于该装备具有侦察机和无源干扰机,因此需要设置2个独立评定组件,分别与侦察机和无源干扰机相关联。
(2)设计并实现组件工厂类,用于实例化基础组件,其代码实现如下:
class EWPluginFactory:public QObject,public pluginInterfaceFactory
{
Q_OBJECT
Q_PLUGIN_METADATA(IID”QDataSource.EWPluginFactory“FILE”EWPluginFactory.json”)
Q_INTERFACES(pluginInterfaceFactory)
public:
virtual boolsetPluginName(QString name)Q_DECL_OVERRIDE;
// 获取侦察机实例
virtual pluginInterface* getReconnaissanceInstance()Q_DECL_OVERRIDE;
// 获取有源干扰机实例
virtual pluginInterface* getActivejammingInstance()Q_DECL_OVERRIDE;
// 获取无源干扰机实例
virtual pluginInterface* getPassivejammingInstance()Q_DECL_OVERRIDE;
virtual void destoryPlugins()Q_DECL_OVERRIDE;
private:
pluginInterface* reconnaissanceInstance;
pluginInterface* activejammingInstance;
pluginInterface* passivejammingInstance;
};
然后设计侦察机独立组件和无源干扰机独立组件,具备组件描述文件读取、解析、设置功能和评定原始数据收集功能,在训练过程中完成数据收集工作,其代码实现如下:
class pluginReconnaissance:public pluginInterface
{
Q_OBJECT
public:
pluginReconnaissance();
~pluginReconnaissance();
virtual void setMainwindow(QMainwindow window)Q_DECL_OVERRIDE;
virtual void showWidget()Q_DECL_OVERRIDE;
virtual void createTCP()Q_DECL_OVERRIDE;
virtual void createUDP()Q_DECL_OVERRIDE;
signals:
void setNetInfo(QStringip);
private:
// 读取配置文件
virtual void readProfile()Q_DECL_OVERRIDE;
// 设置配置信息
virtual boolsetRecvStruce()Q_DECL_OVERRIDE;//接收报文
virtual boolsetSendStruce()Q_DECL_OVERRIDE;//发送报文
virtual boolsetIO()Q_DECL_OVERRIDE; //接收、发送报文处理
QStringipUDP,ipTCP;//网络地址,配置文件设置
QInt16 portUDP,portTCP;//网络端口,配置文件设置
double dbRFMax;//工作频段最大值由配置文件和实装显控台设置
double dbRFMin;//工作频段最小值由配置文件和实装显控台设置
};
(3)根据侦察机的技战术指标,设置此侦察独立组件的属性,标识该雷达对抗装备中的侦察机工作频段、工作方式,天线扫描方式等,同时根据评定 指标,设置评定指标参数,配置为描述文件。
(4)根据无源干扰机的工作能力和技战术指标,设置无源干扰独立组件的属性,标识该雷达对抗装备中的无源干扰机的干扰样式,干扰操作流程,干扰操作时间等,此外,设置评定指标和参数,配置为描述文件。
(5)侦察机独立组件和无源干扰机独立组件读取各自的配置文件进行配置,明确对应装备的技战术指标,在训练过程中收集操作手的操作信息,在训练结束后根据评定指标对操作手的训练进行评定,指导操作手的训练。
系统组成图如图2所示,其中虚线装备为数字组件。

图2 评定系统组成图
(6)根据评定组件的设计可知,侦察机组件和干扰机组件可根据组件描述文件任意扩展,因此可覆盖多型评定对象,有效解决了评定对象多、评定扩展难的难题。
4 评定系统工作流程
评定系统分为2个阶段,即设计阶段和运行阶段。
设计阶段主要是完成独立组件的设计,或者是根据评定需求将多个独立组件进行组合,完成评定系统的构设。构设完成后可进行保存,便于重复使用。
运行阶段主要是完成训练开始后获取数据、评定计算以及评定结果显示。
4.1 设计阶段工作流程
在设计阶段,考评员根据训练装备的类型选择独立组件和组合组件,将其拖动到设计界面上,然后通过连接线将其连接,同时还可根据评估需要修改独立组件和组合组件的属性,最后保存完成设计工作。其工作流程如图3所示。
4.2 运行阶段工作流程
在训练开始前,评定系统根据设计阶段所要评定的项目,通知数据接收独立组件,获取相应的评估原始数据。
在训练开始后,评定系统从数据接收独立组件获取评定原始数据,并评定模型计算各个分项结果[3]。
训练结束后,评定系统将计算结果发送至数据库读写独立组件。并根据需要调用评定结果,显示独立组件,显示结果并生成报告[4]。
其工作流程如图4所示。

图3 设计阶段工作流程示意图
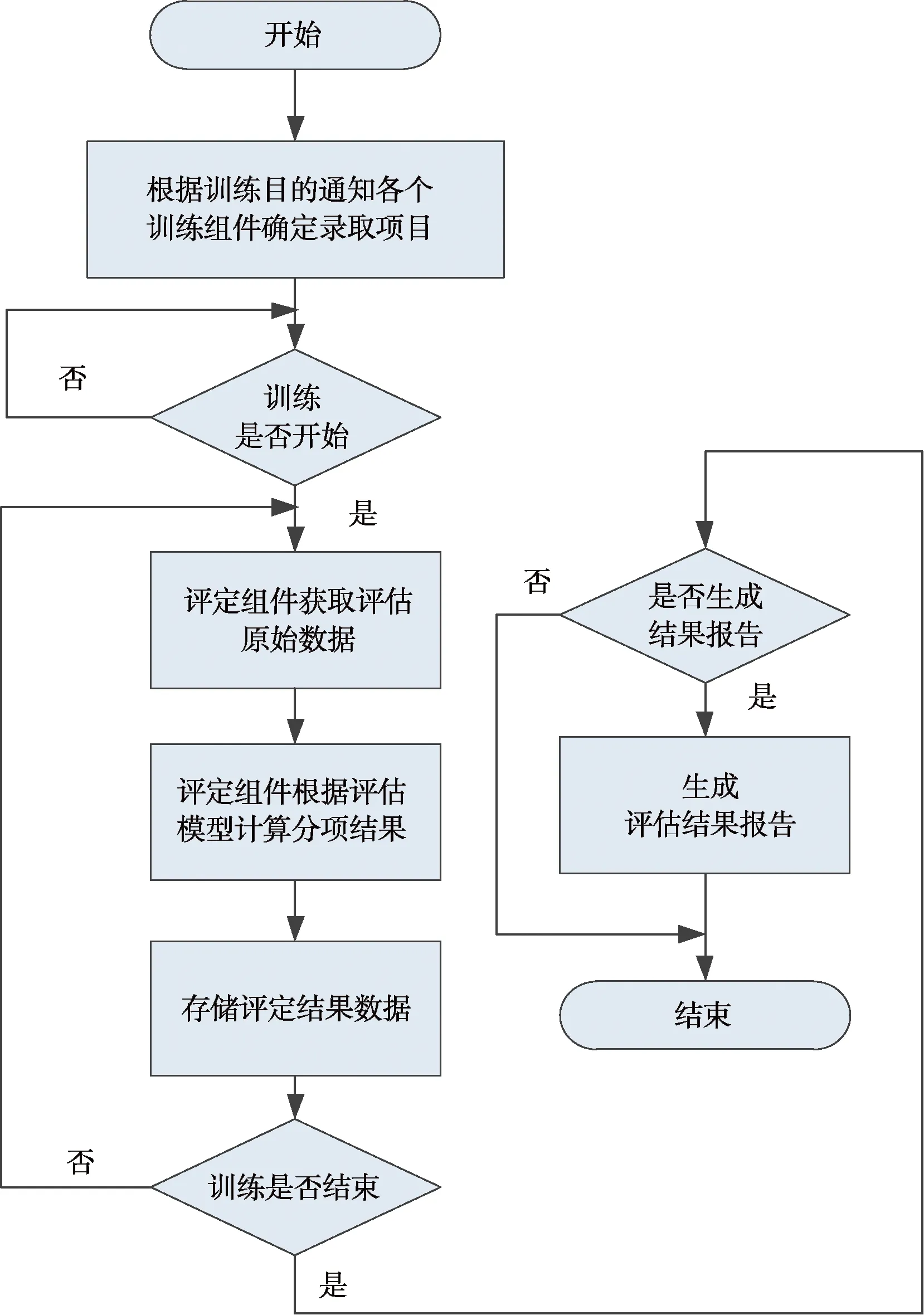
图4 运行阶段工作流程示意图
5 系统应用
在完成某型雷达对抗装备的评定系统的设计与实现后,对该设备的操作手进行训练评定[5],评定结果如图5所示。
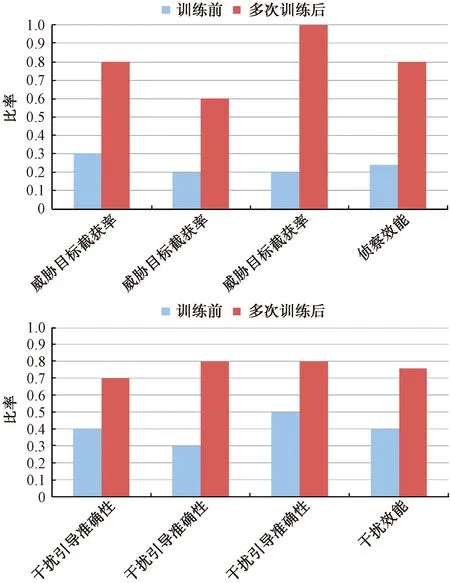
图5 系统应用示意图
从图5可以看出,通过本评定系统对操作手的训练进行评定,使得该操作手的操作能力有了大幅提升,侦察效能由0.24提高到0.8,干扰效能由0.4提高到0.76。
6 结 论
本文介绍了一种将独立组件应用于评定系统的技术。此方法不仅可以提高评定系统的适用范围,提高工作效率,还能有效解决评定对象多、评定扩展难、评定模式单一的问题,为实现雷达对抗装备操作手多样化模拟训练的结果评定奠定基础。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
计算机测量与控制(2022年3期)2022-03-30
舰船电子工程(2020年9期)2020-10-30
航天电子对抗(2020年6期)2020-02-04
中国航海(2019年2期)2019-07-24
中学科技(2018年2期)2018-03-15
中学科技(2016年12期)2017-01-07
中学科技(2016年11期)2017-01-07
现代兵器(2016年6期)2016-06-25
现代电子技术(2009年9期)2009-06-25
