
基于新型气囊传感探头的脉搏检测装置设计*
2019-05-07 11:45张爱华王敬阳林冬梅
传感器与微系统 2019年5期
张爱华, 王敬阳, 林冬梅, 王 琦
(1.兰州理工大学 计算机与通信学院,甘肃 兰州 730050;2.兰州理工大学 电气工程与信息工程学院,甘肃 兰州 730050;3.兰州理工大学 甘肃省工业过程先进控制重点实验室,甘肃 兰州 730050;4.兰州理工大学 电气与控制工程国家级实验教学示范中心,甘肃 兰州 730050)
0 引 言
中医切脉的准确性与可靠性依赖于医师个人的主观感觉与经验积累,缺乏客观、量化的诊断指标,存在主观性强和可重复性差等不足。研制脉诊客观化检测装置,对于揭示中医切脉机理、疾病预防与诊断等均具有重要的科学意义和广阔的应用前景。目前,脉搏检测主要采用光电式、压电式和压阻式传感器等[1~7]。国内外学者也研制了不同种类的脉搏检测装置,如桡动脉触力传感器检测装置、3维数字图像相关法的脉搏信息采集系统、双感脉诊仪、腕部脉搏采集装置等[8~12],可检测到三部九侯的脉搏信号,由于传感器体积、点数及检测方式等限制,不能精细地反映切脉皮肤表面各点的形变情况,且获得的脉幅值不是脉搏搏动的实际纵向离面位移值。
本文研制了多代基于气囊探头的脉搏检测装置[12~16],实现了3维脉搏信息可视化。本文在前期工作的基础上,进一步研究灵敏度高、可重复性强的新型脉搏检测装置,实现气囊传感探头内压与血管内压精准匹配,获得更为丰富且有效的脉搏信息。
1 改进的脉搏检测装置
1.1 装置介绍
脉搏检测装置如图1(a)所示,由切脉压力加载模块、双目视觉同步采集系统模块以及气囊传感探头模块组成。切脉压力加载模块和双目视觉同步采集系统模块如图1(b)所示。切脉压力加载模块主要由4个部分组成:直进式测微头(日本三丰Mitutoyo公司,153—203#,分度值0.01 mm)、调焦手轮旋钮、“一”字形应变片、以及铝制气囊传感探头固定支架。双目视觉同步采集系统由硬件系统与软件系统构成[16]。其中,硬件系统的主要构成有:2部CCD工业相机(Basler acA1300—30gm,GigE接口,分辨率为130万像素,最大帧率为30 fps)、工业镜头(COMPUTAR M0814—MP,焦距为8 mm,镜头畸变小于1 %)、铝制“Z”型相机固定支架。气囊传感探头模块如图1(c)所示,用于感知及转换桡动脉处血管的运动,主要由6部分构成:异形亚克力薄片(直径为80 mm,厚度为3 mm)、可穿孔硅胶垫片(厚度为3 mm)、柔性薄膜(厚度为0.5 mm)、进气孔、固定螺钉、直径为80 mm的中空有机玻璃筒状体。气囊传感探头顶端由强透光性、自重轻的异形亚克力板制作,可保证气囊传感探头的气密性。选用邵氏硬度为60的硅胶垫片作为气囊传感探头密封圈,并在其侧壁留有小孔用于放置导气管。柔性薄膜采用厚度为0.5 mm的聚乙烯材料制作,表面通过光敏印章印有数量为45×45个圆形标记点。气囊传感探头管壁采用半透明有机玻璃棒制成筒状体,可实现柔性薄膜的固定。通过浸水气泡法与压力表示数观察法验证,该气囊传感探头具有良好的气密性。
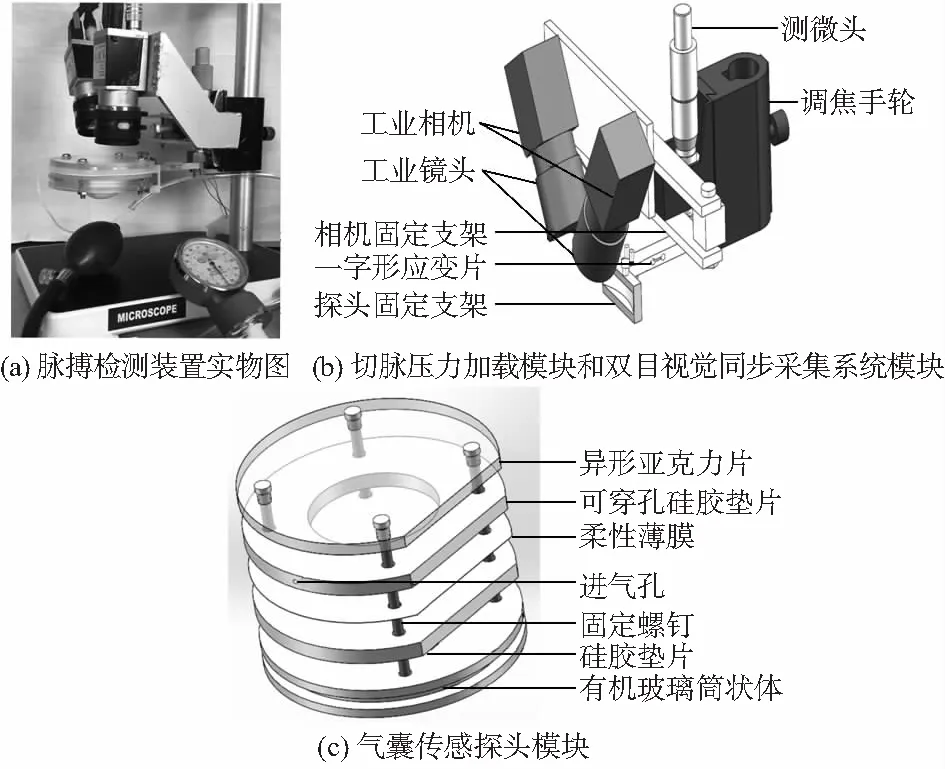
图1 基于气囊传感探头的脉搏检测装置
1.2 工作过程
中医师切脉过程存在2个最明显的特征,即通过指面向脉管施加不同大小的力,指面也能感受到反映脉搏特点的细微反搏力。在脉搏检测装置中,使得气囊传感探头内充有适量气体,以气囊传感探头柔性薄膜模拟人体指面,其形变大小可间接感知脉管的细微反搏力;通过改变测微头测量杆垂直高度,使得气囊传感探头可调节作用于脉管的力。脉搏检测装置的工作过程可描述为:
1)通过光敏印章将规则圆形特征点印制于柔性薄膜,按照图1(c)进行顺序组装气密性良好的气囊传感探头。
2)使得桡动脉下段(手腕)处于气囊传感探头正下方,借助调焦手轮旋钮确定气囊传感探头与被试者腕部检测区域的初始位置。
3)以0.05 mm为步长向上或向下旋转测微头微分筒,通过激光位移传感器实时观察不同状态下薄膜形变量,确定气囊传感探头内压与血管内压的匹配程度,以薄膜形变量最大值时测量杆运动位移作为数据采集的最有效状态。
4)最佳匹配状态确定后,通过气囊传感探头上方双目视觉同步采集系统采集动态薄膜图像与标定图像。
2 检测装置性能分析
2.1 实验方法
精度是衡量装置性能的指标之一。脉搏检测装置采集薄膜图像时,若气囊传感探头内压与血管内压未达到匹配状态,将导致血管壁运动未能完全有效地转换为动态薄膜形变,从而引起误差;同时,多点脉搏波计算时,相机标定结果、特征点提取参数设置、特征点空间坐标计算等都会引入误差。为了进一步验证脉搏检测装置检测结果是否有效,设计以下实验。
本实验选取可调节z轴位移的升降台作为参照物,采用激光位移传感器与脉搏检测装置同时检测升降台z轴位移,以激光位移传感器检测结果为参考,分析脉搏检测装置误差。通过北京思迈科华技术有限公司的8通道同步数据采集卡USB—4221对激光位移传感器模拟信号进行A/D转换、数据传输、存储,采样率为100 Sa/s。
2.2 实验步骤
1)将LZ40型升降台放置于稳定平面上且调节至标准平面处(螺旋千分尺0 mm刻度线时升降台台面所在平面作为标准平面)。2)将激光位移传感器固定在有效测量范围内且激光点可垂直照射在升降台台面处,如图2所示。
图2 脉搏检测装置精度分析实验
3)通过螺旋千分尺手动调节升降台台面距离标准平面距离,每次向上或向下旋转约0.1 mm且保持状态约10~20 s,使得台面距离标准平面的位移约是0.1 mm以及0.2 mm。4)将检测结果与标准值进行对比,分析该装置精度。
2.3 分析与讨论
激光位移传感器采集的数据为电压值,进一步可得到升降台台面位移。通过脉搏检测装置采集LZ40型升降台不同状态时的薄膜图像。通过图像二值化、质心提取等预处理及立体匹配等算法[15],可确定动态薄膜图像中用于计算LZ40升降台位移的标记点公共区域为4×4个标记点。通过双相机立体标定算法[17],可得到标记点从成像平面坐标系与世界坐标系之间的关系。由标定结果可知:左右相机的有效焦距为(2 243.335 54 2 240.091 52),(2 221.409 79 2 216.455 12),旋转矩阵om为(-0.002 93 0.630 97 0.016 71),平移矩阵T为(-39.398 43 -1.390 00 20.831 64)。基于相交光轴双目视觉系统结构测量原理,应用空间点坐标计算式(1),计算柔性薄膜图像中标记点的空间3维坐标
(1)
式中 (x,y,z)为标记点在世界坐标系的3维空间坐标,(Xl,Yl),(Xr,Yr)是标记点在图像坐标系中的图像坐标,fl,fr是左、右相机的焦距,(r1,r2,r3,r4,r5,r6,r7,r8,r9)构成大小为3×3旋转矩阵om,(tx,ty,tz)构成大小为1×3的平移矩阵T。
为了更加准确、有效地分析脉搏检测装置的检测精度,按照上述实验步骤进行10次重复性实验,对升降台台面的不同状态进行研究。通过激光位移传感器校准脉搏检测装置检测结果,实验结果表明:脉搏检测装置检测结果平均误差为0.001 2 mm,均方误差为0.002 9,最大误差为0.004 7 mm,精度为95.17 %。
3 检测装置可靠性分析
3.1 最佳匹配状态确定与实验数据
为了进一步说明装置检测结果的可靠性,本文选择上海中医药大学研发的MM—3脉象模型(A组),作为动态脉搏信号发生器。其中,随着模拟血管的收缩扩张,仿生手腕部模拟血管产生搏动,使得气囊传感探头柔性薄膜产生形变,进一步引起柔性薄膜上标记点发生位移。最佳匹配状态确定过程,具体如下:将激光位移传感器稳定固定于气囊传感探头上方;通过充气装置使得探头内具有40 mmHg的初始内压;通过手轮调焦旋钮使得柔性薄膜与仿生手桡动脉处“皮肤”贴合,作为调节最佳匹配的起始状态;以0.05 mm为步长调节测微头垂直行走,比较不同状态下脉搏波脉幅值(pulse amplitude,PA),以脉幅值最大值所属状态作为最佳匹配状态,结果如图4所示。由图3可知:在该初始位置下,从检测到最大脉幅值至恢复最大脉幅值状态时,共需10次调节,测量杆位移为0.3 mm,此时,最大脉幅值为0.200 1 mm,认为气囊传感探头内压与血管内压实现最佳匹配。同时,由于调节次数受到初始位置的影响,上述最佳匹配状态调节次数与测量杆位移不具有唯一性。
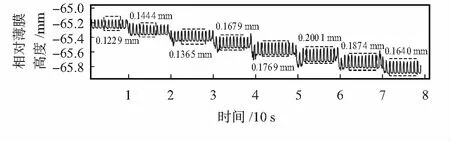
图3 最佳匹配状态确定过程
气囊传感探头内压与血管内压匹配时,通过脉搏检测装置采集动态薄膜图像。由脉搏波提取及脉搏形态3维重构算法可得,某一时刻图像平面和脉搏形态的3维空间对应关系[15],如图4所示。其中,图4(a)中圈为柔性薄膜形变较为明显区域,图4(b)为某一时刻脉搏3维形态的重构图像,其横纵坐标分别表示标记点对应薄膜上的尺寸,z轴表示脉搏搏动的实际纵向离面位移值。计算连续时间内某一标记点的z值序列,将其连接成波形,即可获得该标记点的脉搏波。脉搏检测装置和激光位移传感器的检测结果,如图5所示。

图4 某一时刻图像平面和脉搏形态的三维空间对应关系
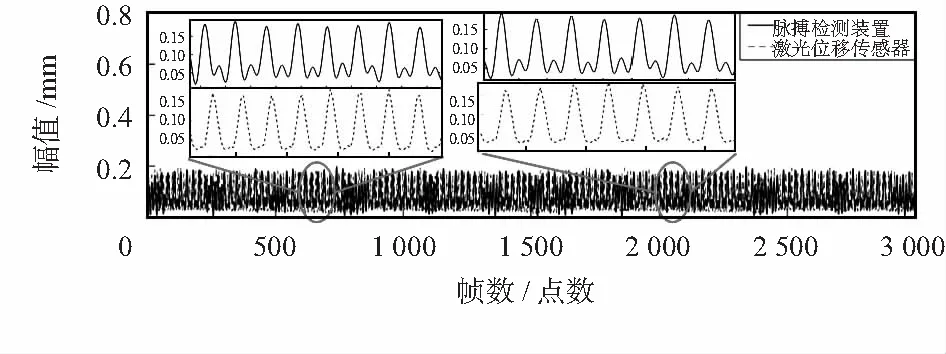
图5 脉搏检测装置与激光位移传感器检测结果
3.2 一致性分析
Bland-Altman法是用于评价两种测量一致性的标准方法。基本思想是分别以检测结果均值和差值作为横轴和纵轴,计算95 %差值在一致性界限(-1.96SD,+1.96SD)的分布情况,确定两种测量方式是否具有一致性[18]。通过上述方法对3.1节中检测结果的进行一致性分析,结果如图6所示。
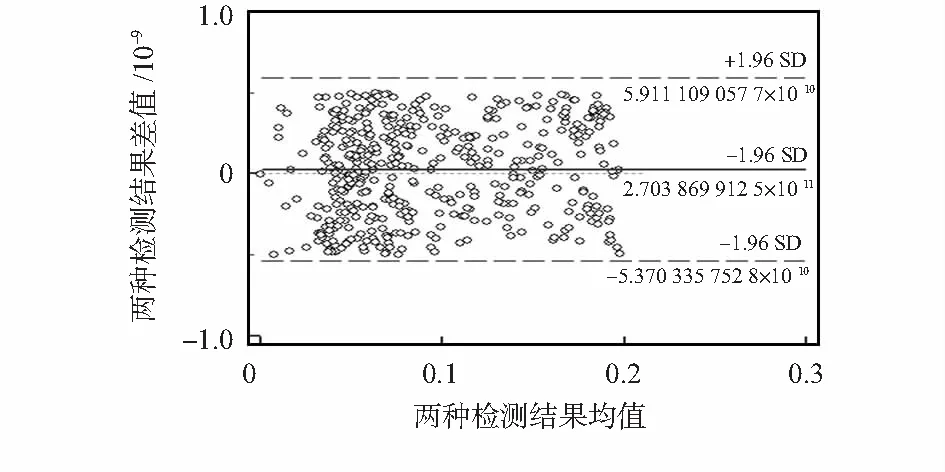
图6 脉搏检测装置与激光位移传感器一致性分析结果
从图6可看出:脉搏检测装置与激光位移传感器检测结果的差值均分布在±1.96SD区间内。因此,脉搏检测装置与激光位移传感器检测结果具有一致性。
3.3 稳定性分析
通过贝塞尔法确定标准不确定度[18],其计算公式
(2)

为了进一步说明脉搏检测装置单次检测结果具有稳定性,在相同实验环境下,采集时间为1 s的MM—3脉象模型(平脉)脉搏信息,提取同一标记点在单个周期内波峰值与波谷值进行稳定性分析,相同实验环境下,记录10次检测结果的波峰值分别为0.193 3,0.199 8,0.199 7,0.195 9,0.198 4,0.193 1,0.195 4,0.199 3,0.198 3,0.199 7 mm;波谷值分别为0.028 2,0.001 3,0.001 1,0.001 8,0.003 9,0.032 9,0.027 8,0.012 7,0.038 0,0.001 4 mm。
4 结 论
实验结果表明:在静态信号分析中,该装置检测结果平均误差为0.001 2 mm,均方误差为0.002 9,最大误差为0.004 7 mm,其最大精度为95.17 %,该精度符合日常监测检测条件;在动态信号分析中,该装置检测结果具有较强的可重复性与稳定性。因此,该装置可作为脉幅值的有效获取方式。
猜你喜欢
演艺科技(2021年5期)2021-06-05
演艺科技(2020年5期)2020-07-15
技术与市场(2020年3期)2020-03-26
发明与创新·中学生(2019年3期)2019-03-20
金桥(2018年2期)2018-12-06
大众电视(蓝天下)(2018年8期)2018-10-26
电子制作(2017年14期)2017-12-18
电器工业(2017年1期)2017-04-11
医学研究杂志(2015年11期)2015-06-10
中国医学科学院学报(2014年6期)2014-03-11
