基于一次回波数据的气象雷达风轮机杂波抑制
2019-05-14 02:42何炜琨王晓亮
中国民航大学学报 2019年2期
何炜琨,高 丽,王晓亮
(中国民航大学天津市智能信号与图像处理重点实验室,天津 300300)
作为可再生能源,风能已受到各国青睐。十多年来,世界风力累计装机容量呈现指数化增长趋势[1]。雷达波束覆盖区域内风轮机后向散射引起的杂波与气象目标回波具有相似特性,进而影响气象目标参数估计的稳定性。研究气象雷达风轮机杂波抑制技术,对于降低气象目标的误检测和误识别概率、提高气象观测预报准确性、保障飞行安全具有重要意义。
目前气象雷达风电场杂波抑制技术主要围绕凝视和扫描两种模式展开,凝视模式下的抑制方法主要包括Radon变换法、中值滤波法、匹配追踪算法以及利用风轮机杂波时域周期特性来实现风电场杂波的抑制[2-4]。上述抑制方法要求雷达驻留时间较长,对于相干脉冲间隔较少的气象雷达而言,性能受到一定的局限。对于扫描模式下的杂波抑制方法:Kong等[5]提出了自适应谱处理算法;Feng等[6]提出了距离多普勒回归算法(RDR,range Doppler regression);奥克拉荷马大学气象研究中心利用散射仪遥测系统基于自适应算法抑制风电场杂波[7];Kong等[8-9]提出了基于自适应滤波器(如维纳滤波器等)的风电场杂波抑制方法和最大后验概率(MAP,maximum a posterior)算法;Frank等[10]提出了信号分离法。上述算法或是未污染区域的数据样本有限,影响运算性能,或基于二次回波数据(Level II数据)进行,运算复杂度较高。
在传统利用风轮机杂波周期特性实现航管监视雷达风电场杂波抑制方法基础上展开研究[11]。该方法利用风轮机杂波的周期特性得到随频率变化的校正曲线,修正回波功率谱,从而在保留飞机目标的前提下能有效抑制风轮机杂波。然而与飞机目标不同,气象目标属于分布式目标,具有一定频带宽度,传统基于周期特性的风电场杂波抑制算法对于与气象目标处于相同频带范围内的风轮机杂波抑制效果有限。利用气象目标参数随距离连续分布特性,利用临近未受风轮机杂波污染区域的回波数据作为先验信息,对传统基于周期特性的风轮机杂波抑制后的结果进行处理,以此提高算法性能。
1 数据获取
1.1 气象目标回波仿真
气象目标的无规则运动使得其频谱分布在一定连续频谱区域内,即频谱扩展。气象目标回波功率谱密度近似高斯分布为

其中:Pr、fd、σf分别为气象目标回波的平均功率、平均多普勒频率及谱宽。
在一定信噪比(SNR)下,接收到的气象目标回波功率谱密度[12]为

其中:S(f)为式(1)求得的气象目标功率谱密度;N 为噪声的功率谱密度,X为服从[0,1]均匀分布的随机数。
接收目标回波信号为

其中:θ(f)为模拟回波在[0,2π]均匀分布的相位谱;IFT为傅立叶逆变换。
1.2 气象雷达回波信号模型
基于散射点叠加模型得到风轮机回波模型[13]。该模型中风轮机叶片回波等效为大量圆片回波的叠加,且轮机舱、桅杆回波为点目标回波的叠加。其中,风轮机叶片与雷达波束的位置关系[13]如图1所示。
由此,风轮机杂波回波信号为

其中:ρtower、ρblade分别为桅杆和叶片上各散射点的雷达散射强度;c为光速;λ、T分别表示雷达波长与脉冲重复时间;Rn,i(t)为第n张叶片上第i个薄片和雷达间的径向距离;u(t)为矩形脉冲信号;R为风轮机轴心和雷达间的径向距离;M为一个距离门中雷达回波数据的长度。进而,气象雷达回波为


图1 风轮机叶片和雷达波束的位置关系Fig.1 Position relation between wind turbine blade and radar beam
2 基于周期特性的气象雷达风轮机杂波抑制
风电场杂波对气象雷达会产生显著影响,气象雷达风轮机杂波抑制技术的研究很有意义。美国Lone Star风电场对KDYX产生多径干扰[1],如图2所示,产生的多径散射可能使周围气象雷达信号受到影响,使气象雷达产生大量的虚假目标。图3为平均反射率因子在Lone Star建立前后的对比图。从图3可看出,风电场建立后其区域附近反射率因子数值变大很多,这会严重影响对气象目标的准确观测。

图2 美国德克萨斯州Lone Star风电场对附近气象雷达产生的多径干扰Fig.2 Multi-path interference caused by Lone Star Wind Farm on nearby weather radars in Texas

图3 美国某地气象雷达在附近风电场建立前后所获取的平均反射率Fig.3 Average reflectivities obtained by one meteorological radar before and after establishment of a nearby wind farm in US
扫描模式下的气象雷达回波数据相当于聚束模式下的雷达回波数据采样。气象雷达的相干脉冲数较少,为此每次扫描只能获得很少的风轮机回波,为实现基于风轮机周期特性的风轮机杂波抑制,首先需要对扫描模式下的风轮机回波缺省数据进行填充,而后利用周期特性抑制风轮机杂波。
2.1 基于GAPES的回波缺省数据重构
为实现扫描模式下风轮机回波缺省脉冲的重构,首先需从获得的多次风轮机回波扫描数据中搜索出两个与多普勒频率相反的峰值数据,然后进行风轮机回波周期的估计,最后基于GAPES算法实现两个峰值之间缺省数据的重构。
GAPES方法重构风轮机回波信号问题即是估计雷达回波信号幅度及其相位的问题。GAPES算法是APES算法在数据缺损情况下的一个扩展[14],其基本思想是利用已知数据,采用非参数估计方法对缺省数据进行幅度和相位估计,且该算法是在缺省数据的谱内容类似于已有数据谱内容的假设前提下进行的,其实现框图[11]如图4所示。

图4 基于GAPES的风轮机回波数据重构算法实现框图Fig.4 Reconstruction flowchart of echo data based on GAPES wind turbine
2.2 基于周期特性的风电场杂波抑制
获得风轮机完整周期的回波数据后,即可基于风轮机杂波的周期特性进行杂波抑制。风轮机回波有周期性,而气象目标回波不具有周期性。该抑制方法正是利用这个特性在时频域内实现抑制的。
首先提取风轮机所处距离单元的雷达回波数据并对其进行时频分析;然后以风轮机扫描周期为分段周期将频域内的回波数据分成若干段,针对每个频点依次计算任意两子数据的相关系数并求其平均值,循环多次得到随频率变化的调制函数C(f)。最后用C(f)对雷达回波功率谱进行校正,即可达到抑制风机杂波、保留气象目标的目的。基于周期特性的风电场杂波抑制算法流程[11]如图5所示。

图5 风轮机杂波抑制流程Fig.5 Flowchart of wind turbine clutter suppression
基于周期特性的风电场杂波抑制算法,其关键步骤是频谱调制函数C(f)的获取。由于风轮机杂波具有周期特性,因而按照风轮机回波的周期对回波数据进行分段,并求任意两段子数据的相关系数,在风轮机频谱范围内,其调制函数C(f)取值较大,接近于1。而气象目标频谱范围内所表现出的C(f)值则较小,利用调制函数C(f)对回波功率谱进行校正[11],可得

其中:X(f)、X′(f)分别为调制前后的频域内幅值;α 为需通过经验确定的调制因子;10-αC(f)为调制因子,呈递减特性,使C(f)对由风电场杂波周期性所引起的峰值经校正后的幅度谱出现谷值,而C(f)对噪声和目标回波引起的谷值经校正后的幅度谱出现峰值,凸显出气象目标信号而使风轮机杂波尽可能小,从而实现气象雷达风轮机杂波抑制。
2.3 改进算法
与飞机目标不同,气象目标属于分布式目标,具有群聚性和弥散性等特性。这使得在频域内,气象目标的频率分布范围比飞机目标更广,可能会出现风轮机回波频谱与气象目标频谱部分重叠的问题,影响该频段范围内的风轮机杂波抑制效果。为此需对传统的基于周期特性的风电场杂波抑制算法进行改进。
改进算法中,首先基于周期特性进行风轮机杂波抑制;然后根据气象目标参数随距离均匀分布的特性,以风轮机附近未污染距离单元的气象回波数据作为先验信息对风轮机杂波与气象目标频谱重叠的频段范围内的抑制结果进行处理,以提升算法性能,改进算法对应的流程如图6所示。
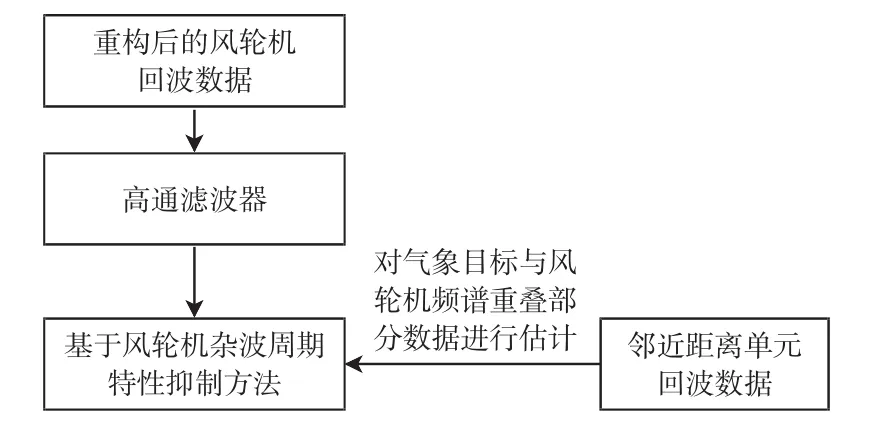
图6 改进算法流程图Fig.6 Flow chart of improved algorithm
风轮机杂波与气象目标频谱重叠区域数据处理过程如下所述。首先,对邻近风轮机距离单元(可取相比风轮机距雷达更近的单元)且方位相同的一个未污染单元回波数据做时频分析;然后对风轮机单元经传统基于周期特性的风电场杂波抑制后的时频谱进行处理,在时频域内分别求取风轮机单元每个频点在时间频率采样点数值与相应频点未污染距离单元在时间频率采样点数值的差值;最后对每个频点在相同时间频率采样点的差值与阈值进行比较。如果其差值大于阈值,则抑制后每个频点在时间频率采样点的数值被该频点邻近未污染距离单元在时间频率采样点的数值取代;反之,则抑制后该频点在时间频率采样点的数值不变。需要说明的是,阈值的选取需要通过未污染区域时频谱的变化作为先验信息,选取具体过程为:对与风轮机方位相同、距离稍远和稍近的若干个邻近单元作时频分析,可求得任意两个相邻距离单元时频谱在各时频采样点的差值,各时频采样点的阈值取该时频采样点多组差值中的最大值。
3 算法性能的定量评价指标
从抑制前后回波数据时频谱图像的熵值和杂波抑制前后气象目标参数估计偏差两方面来定量评估风轮机杂波抑制效果。熵值代表图像的能量信息。由于气象目标的反射率因子、径向速度和谱宽等参量随距离均匀分布[15-16],因而认为未受风电场污染区域参量随距离变化的图像熵值较小,污染区域相应参量所对应的图像熵值将有所增加。
4 实验结果与性能分析
仿真实验中,气象目标及风轮机相关参数设置如表1所示。气象目标回波功率谱如图7所示。信噪比SNR=25 dB,在第190个距离单元包含风轮机杂波。从该距离单元得到风轮机与气象回波的距离多普勒谱,如图8所示。提取风轮机与气象目标同时存在的距离单元,对其进行时频分析,如图9所示。按照风轮机周期进行分段处理,对任意两段数据求相关,并对所有相关系数取平均,得到相关系数随频率变化的回波功率谱调制函数C(f),如图10所示。由图10可以看出,调制函数在气象目标处于-100~110 Hz频率范围内相关系数值较小,在只含风轮机回波的110~310 Hz和-310~-110 Hz频率范围内相关系数值与1接近。

表1 仿真参数Tab.1 Simulation parameters

图7 气象目标与噪声回波的功率谱Fig.7 Power spectrum of weather target and noise echo

图8 风轮机与气象回波的距离多普勒谱Fig.8 Distance Doppler spectrum of wind turbine and weather echo
调制函数C(f)对回波信号的频谱进行校正以抑制风轮机杂波,抑制后的时频分析如图11所示。可以看出,处于气象目标频率外的风轮机杂波已得到完全抑制,但气象目标回波频率范围内的风轮机杂波仍存在。为抑制残余杂波,利用气象目标均匀分布特性,用其邻近距离单元的气象目标数据作为先验信息,对图11抑制后的数据进行处理,结果如图12所示。

图9 杂波抑制前的时频分析Fig.9 Time-frequency analysis before clutter suppression

图10 调制函数C(f)Fig.10 Modulation function C(f)

图11 传统杂波抑制算法处理后结果Fig.11 Processing result of conventional clutter suppression algorithm

图12 改进杂波抑制算法处理后的结果Fig.12 Processing result of improved clutter suppression algorithm
为进一步验证算法的有效性,对抑制前后的回波数据利用脉冲对法分别进行气象目标的参数(平均径向速度和谱宽)估计,如表2所示。从表2可看出抑制后数据所估计的平均径向速度为10.26 m/s、谱宽2.04 m/s更接近于真实气象目标的平均径向速度和谱宽。回波时频谱熵值由抑制前的8.23 bit减小到1.76 bit。综合来看,改进后的基于风轮机回波周期特性抑制算法能够在保留气象目标信号的前提下有效抑制了风轮机杂波。

表2 定量评估抑制效果Tab.2 Quantitative evaluation of suppression performence
5 结语
利用风轮机杂波的周期特性以及气象目标参数随距离连续分布的特性,实现气象雷达风轮机杂波的有效抑制,并利用抑制前后气象目标参数估计误差及回波时频谱图像熵值的变化定量评价算法的性能,验证其有效性。主要讨论了气象雷达风轮机杂波抑制,是风电场杂波抑制后续研究的方向之一。风电场杂波抑制方法的频谱校正参数是依经验取值的:取较小值时,风轮机杂波有残留;取较大值时,噪声及部分气象目标也受影响。因此,后期需要找到更科学合理的参数值选取方法。
猜你喜欢
科学与信息化(2021年30期)2021-12-24
能源工程(2021年2期)2021-07-21
雷达与对抗(2020年2期)2020-12-25
火控雷达技术(2020年2期)2020-10-16
船舶标准化工程师(2020年1期)2020-06-12
雷达与对抗(2020年1期)2020-06-05
数码世界(2018年11期)2018-12-13
电子制作(2018年17期)2018-09-28
中国航海(2017年4期)2017-04-02
发明与创新(2016年7期)2016-04-20