
车辆盲区检测系统硬件在环自动化测试研究
2019-05-15 03:24李石
汽车实用技术 2019年9期
李石
车辆盲区检测系统硬件在环自动化测试研究
李石
(安徽江淮汽车集团股份有限公司,安徽 合肥 230601)
为了缩短车辆盲区检测系统开发周期,降低开发成本,文章采用NI的硬件架构,以IPG为软件平台构建了盲区检测硬件在环自动化测试系统,全面介绍该自动化测试系统的组成以及工作原理。并在此基础上提出了一种盲区检测系统的硬件在环自动化测试方法,将车辆盲区检测控制器接入到所构建的自动化测试系统中,通过设计测试用例,编辑测试序列并执行,最终生成详细的测试报告完成对盲区检测系统的自动化测试。最后,通过采用本文提出的自动化测试方法,发现了某款车型盲区检测控制器的功能性问题,并且该自动化测试方法相较于传统人工测试方法在测试周期以及成本等方面表现出了极大的优势。
盲区检测系统;硬件在环;自动化测试;NI硬件平台
引言
随着汽车技术的飞速发展,智能化、网联化已成为各大OEM(Original Equipment Manufacturer,简称OEM)关注的热点。盲区检测系统[1](Blind Spot Detection System,简称BSD)在高速换道、后方车辆超车过程中对减少交通事故发生起着关键作用,已成为车辆高级驾驶辅助系统中必不可少的部分。
目前各大整车厂均依据“V流程开发”[2]对高级驾驶辅助系统进行正向开发。随着整车电气系统趋于复杂,传统的人工测试已经无法满足复杂的测试需求,硬件在环[3](Hard -ware-in-loop,简称HIL)自动化测试系统应运而生。相对于传统测试技术,硬件在环测试技术能够模拟极限危险工况,复杂工况能够快速复现,平台可移植性强,准备周期短等优点,在控制器研发初期对其功能进行充分验证,摆脱外围器件的开发进度对被测对象的影响,从而达到缩短开发周期,减小开发成本的效果。目前HIL测试技术在国外已经大量运用于汽车电子的测试之中,且普遍以NI的硬件系统为主,软件部分利用不同的自动化测试软件以及动力学仿真软件进行联合仿真测试;此类方法将场景仿真和自动化测试序列的搭建分离;国内目前也有多家OEM关注并建立了自己的HIL测试实验室并完成了相关的测试工作并取得了好的效果;但是截止目前为止,据笔者所了解,国内还没有OEM针对BSD系统做过HIL测试;本文根据已有的HIL测试技术,全新开发出基于NI的硬件,IPG为软件平台的一套全新的BSD HIL测试系统,将场景仿真和序列搭建融合在IPG一个软件中实现,降低了成本,同时也达到了测试的目的。
1 BSD系统的工作原理
盲区检测系统通过雷达传感器来监控本车侧后方的区域,可以在一定范围内探测到邻近车道上其它车辆的当前位置、行驶速度、行驶方向。具体方法是:通过安装在车辆后保险杠两侧的雷达发射毫米波和对回波进行分析,对本车道和相邻车道内的车辆信息进行探测。当有车辆出现在雷达覆盖区并满足报警条件时,可通过CAN总线将报警信息发送给车辆其他电子部件,同时驱动指示灯和蜂鸣器进行报警。
盲区检测系统原理核心是雷达对被探测物体回波信号进行分析处理,下面主要介绍该部分。
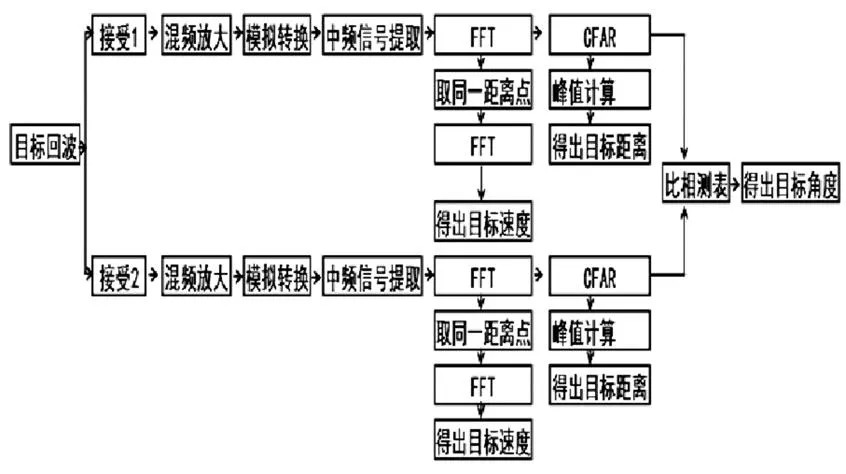
图1 雷达目标信息探测工作逻辑示意图
如图1所示,雷达向其覆盖区域内发射调频连续波,当遇到被测目标时被反射回来,由接收天线进行接收,送至射频处理电路进行处理,其输出的中频信号再由ADC转换成数字信号,送至数字处理电路进行两次FFT(Fast Fourier trans -form,简称FFT)运算得出目标的距离和速度。其中雷达对距离、速度及角度的计算处理过程如下。
1.1 距离计算
通过对N个周期的回波信号分别作M点FFT运算[4],得到对应目标距离的差拍信号频谱,经过恒虚警率(Constant False Alarm Rate,简称CFAR)[5]处理,再根据谱峰值计算出中频信息,即可计算出距离。
1.2 速度计算
完成距离变换后,再对同一距离单元内不同周期的采样点做M点FFT运算,即MTD,求出多普勒频率[6]f,再根据速度计算公式V=λf⁄ 2(为波长),求出目标速度。
1.3 角度计算
在距离频率域,经恒虚警CFAR处理之后,对两组接收天线收到的信号进行比相测角[7],即可得出目标的角度信息。
盲区检测控制器是盲区检测系统的控制单元,包括主、副雷达控制器,通过硬线的开关信号、雷达总线信号等传感器信号输入模块,经过控制器内部处理,实现对车辆盲区范围内车辆报警功能。
本文基于盲区检测系统工作原理及流程开发出针对盲区检测系统硬件在环自动测试系统硬件架构及测试方法。
2 BSD HIL测试系统原理及组成
2.1 BSD HIL系统测试原理
盲区检测系统工作条件复杂,需要多辆车辆协助测试,而且存在一些危险的测试工况,如报警区域的测试,这些测试通过人工实车测试耗费大量的人力物力成本,且重复工作较多,测试周期较长,效率低下。自动化测试通过仿真模型实现车辆的动力学[8]仿真,通过I/O模型[9]实现盲区检测控制器与车辆进行通讯,利用自动化测试软件给控制器输入并监控其输出,达到自动化测试的效果。
2.2 BSD HIL测试系统组成
如图2所示,HIL测试系统[10]主要由试验管理软件、仿真模型、测试上位机以及硬件平台组成;本系统基于NI的硬件平台和试验管理系统,上位机中利用IPG进行场景仿真和自动化测试管理。
如图3所示硬件结构及信号流向图,HIL测试系统主要由上位机、机柜、被测ECU三部分组成。其中,上位机运行Veristand与IPG场景,其与下位机通过网口通信,上位机的IPG模型及MATLAB模型编译后下载至下位机运行,测试人员可以在该界面通过IPG软件或者Veristand软件控制车辆、搭建场景、读取信号等。机柜由下位机、NI板卡、信号调理板卡及故障注入板卡、电源模块等组成,下位机主要负责运行动力学模型及IO模型,IO模型一方面与动力学模型通信,一方面与NI板卡通信,充当NI板卡与CM_mdl之间通信的“媒介”,此外,机柜还有信号调理板卡、给ECU供电的程控电源以及给整个机柜供电的PDU模块。盲区检测控制器为被测试件,其通过EDAC接口与机柜相连;测试过程中通过IPG软件进行测试场景仿真,利用整个硬件平台将车速、档位等不同的输入给到盲区检测控制器,最后通过IPG对控制器的输出进行监控,实现盲区监控系统的自动化测试。
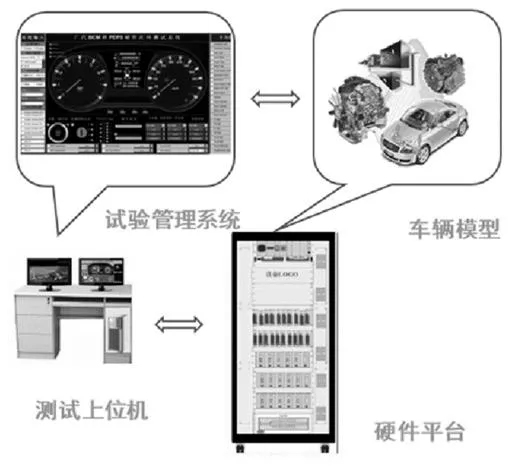
图2 HIL测试系统结构示意图
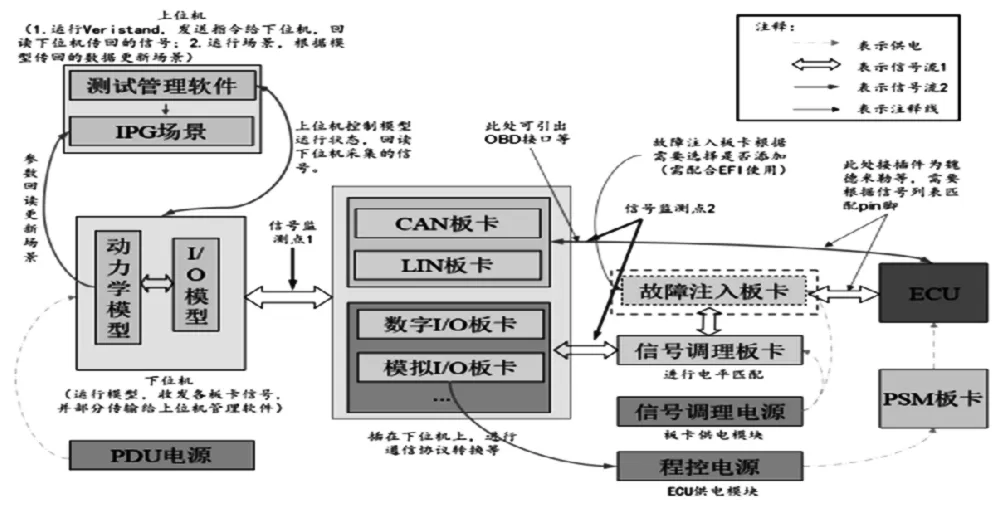
图3 HIL测试硬件结构及信号流向图
3 BSD HIL系统自动化测试方法
3.1 仿真模型搭建
仿真模型包括IO模型和车辆动力学模型,IO模型利用机柜的信号列表和整车DBC文件导入到Matlab中的IO模型生成器自动生成,车辆动力学用IPG自带的动力学模型;由于HIL测试设备采用NI的硬件,IPG软件并不能直接调用NI板卡各通道,因此需要通过Mapping的方式,关联上NI板卡的通道。如图4所示,虚线下方为模型部分,包含CM_mdl与IO_mdl两个模块,它们之间实时通信,其中Convert模块是用于一些简单的逻辑转换(如单位换算等),IO_mdl内部的信号通过Mapping的方式关联NI板卡,CM_mdl内部的信号通过Mapping的方式关联IPG内部信号,从而实现IPG软件对NI硬件信号通道的调用与控制。
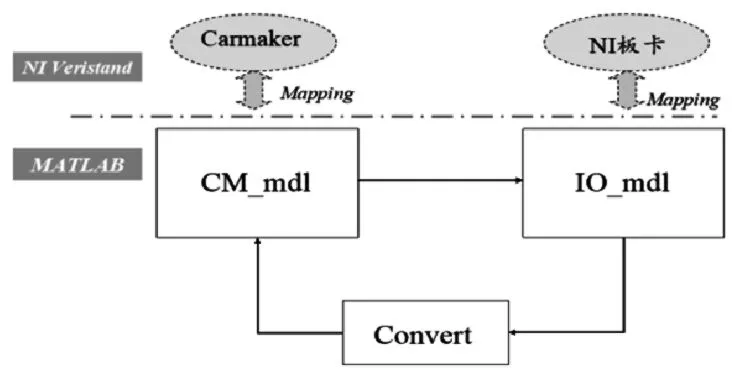
图4 模型信号流向图
3.2 IPG软件自动化测试设计
为实现IPG的HIL测试,测试人员需要完成搭建TestRun及TestManager两部分工作内容。其中,TestRun包含执行该测试用例的初始条件及操作步骤等所有信息,同时,一般在TestRun中,我们会采集某些变量的值,以便用于后续序列评价准则的构建。而TestManager的主要作用则是测试序列管理,在该部分可以实现测试序列评价,打印测试报告等。
本文以搭建一个目标车辆超越本车测试用例为例,介绍搭建TestRun及TestManager的方法,测试用例描述如下:左弯道半径250m,试验车以72km/h速度行驶,目标摩托车在试验车左后方以82km/h速度靠近试验车,目标摩托车右侧最外沿与试验车中心线的距离为2m,目标摩托车进入试验车盲区范围内,BSD报警,记录开始报警时刻和结束报警时刻试验车和摩托车的纵向距离。
3.2.1 TestRun搭建
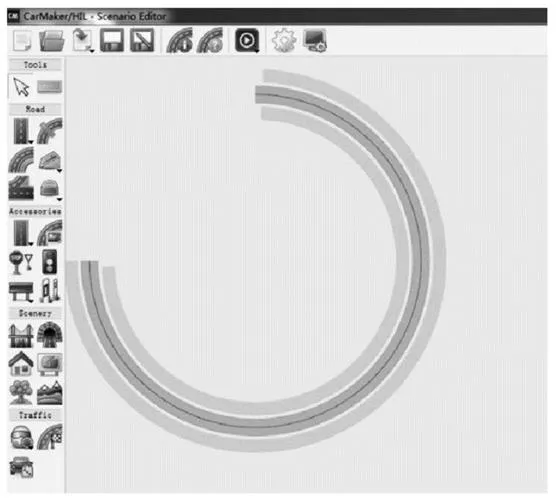
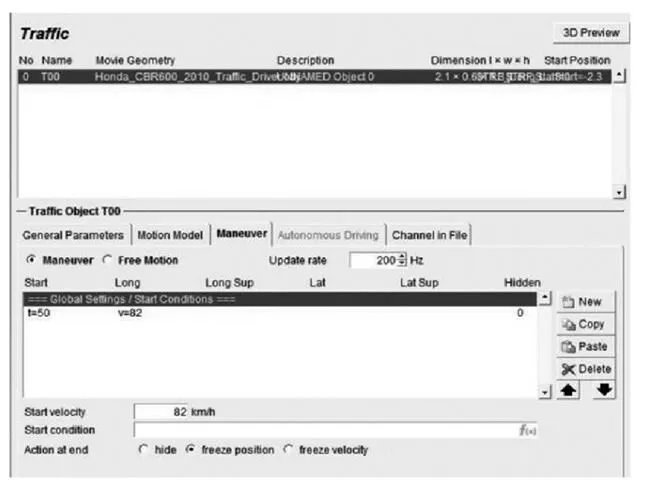
图6 目标车参数配置
TestRun包括道路搭建、交通参与者参数配置、试验车辆信息配置等步骤;道路搭建包括道路属性预设、道路绘制、附属物添加、路径设置等,具体的效果如图5所示;交通参与者的配置主要包括目标车的初始位置、Route属性设置以及行驶速度等,如果6所示;试验车辆信息配置包括Label、End Condition、Duration(time/dist)、车辆纵向控制以及横向控制和相关的操作指令,如图7所示:
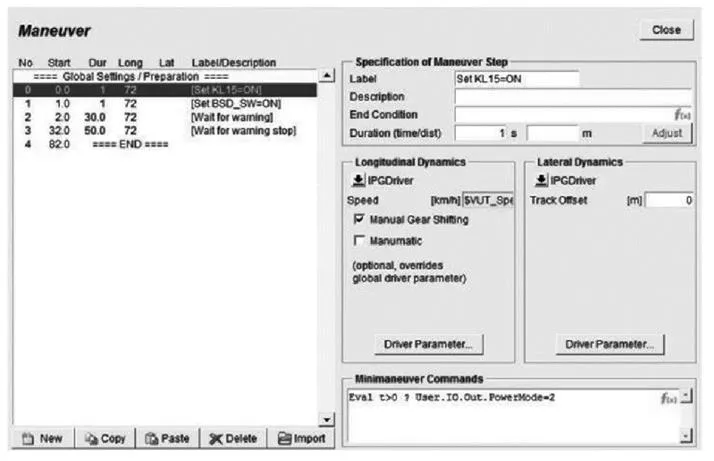
图7 试验车辆信息配置
3.2.2 测试序列管理搭建
测试序列管理包括Characteristics添加、Criteria添加、Diagram添加;对于该测试TestRun,BSD开始报警和结束报警时的距离是我们比较关注的参数,为了使得开始报警和结束报警时刻本车和目标车之间的距离打印出来,我们需要添加一些Characteristics。图8是添加的Characteris -tics,其主要利用实时表达式(RTexpr)脚本计算报警时刻和结束报警时刻的本车和目标车之间的距离;为评价测试用例是否通过,需要通过Add添加评价准则,如图9所示。在上文所述的测试用例中,评价准则报警时刻的BSD主状态(SYSTEM_STATUS1);对于测试报告而言,为了直观的分析测试结果,需要添加图表将一些变量的变化绘制出来便于后期分析,如图10所示。
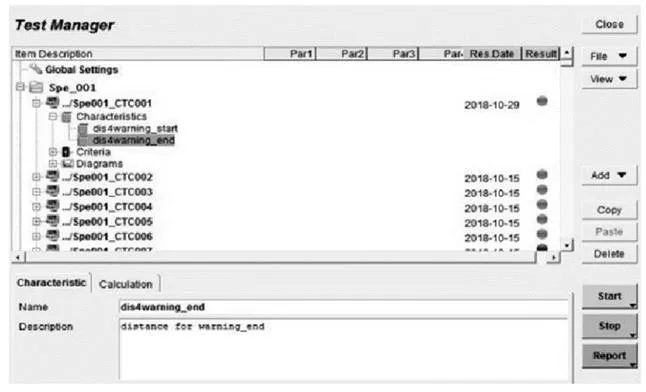
图8 Characteristics添加
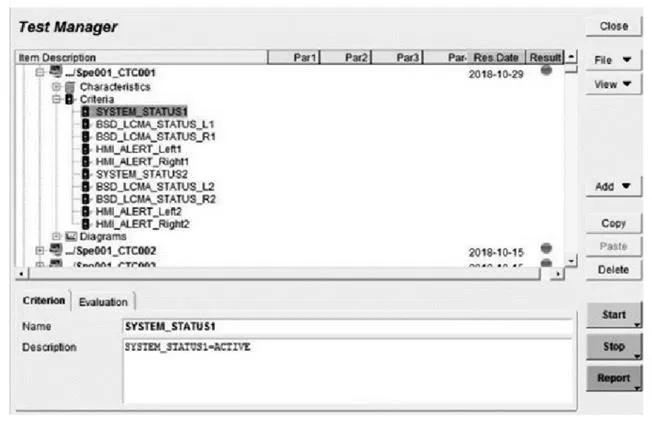
图9 添加评价准则
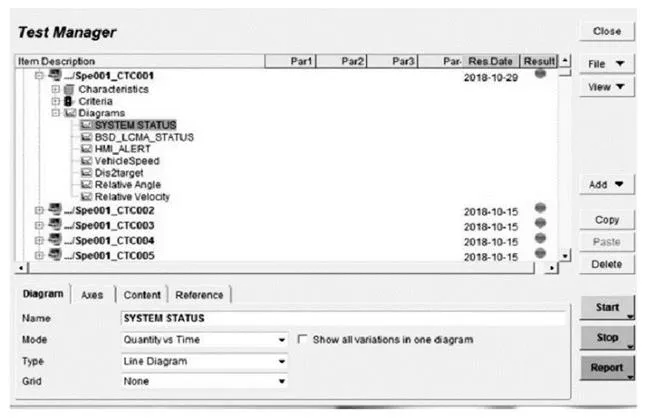
图10 添加图表
3.2.3 测试报告生成
在执行完测试序列之后选择生成测试报告,测试报告如图11所示。
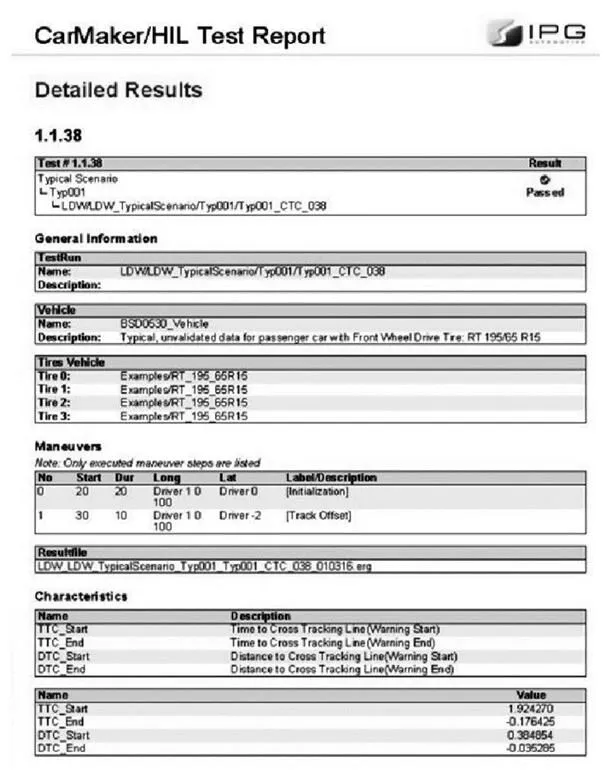
图11 自动化测试报告
3.2.4 测试仿真示意图
测试模型建好之后,可以打开Veristand软件,实施读取Carmaker软件及UI界面,实施显示测试效果及动画,如图12所示,图中显示红色按钮显示目标车进入主车报警区域,UI界面发车报警信号。
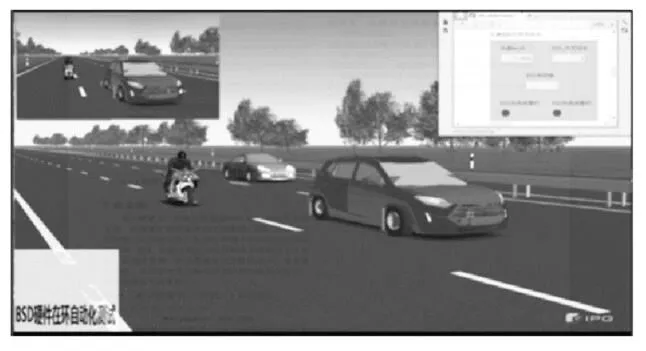
图12 仿真测试动画示意图
4 某型BSD 控制器测试结果及分析
通过自动化HIL测试发现了某款车型BSD控制器的功能性问题。如果对该款车型BSD控制器进行手动测试一般需要一周时间,而自动化测试大概需要24小时,后期回归测试一键测试,效率能够提高5-7倍。
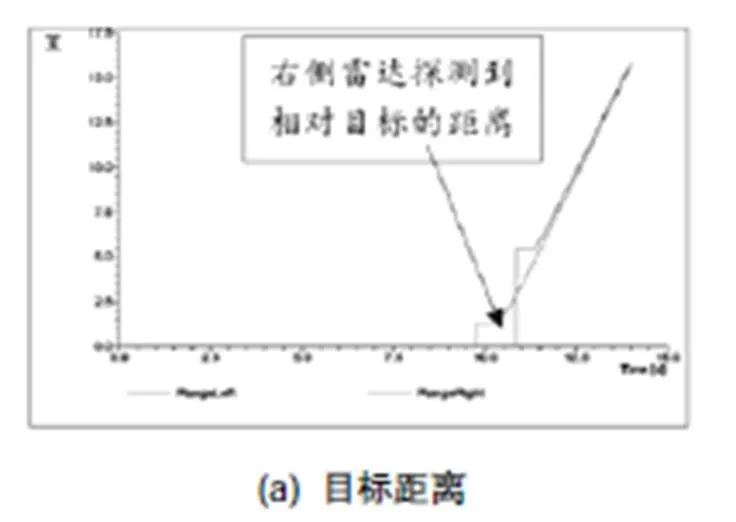
以下举例说明,主车超越目标车(相对速度差为15km/ h),BSD功能不报警;(当两车相对速度<13km/h时,BSD功能可以正常发出报警,当两车相对速度>13km/h时,BSD功能不报警)。如图13所示。
5 结论
本文阐述了一种盲区检测系统的HIL自动化测试方法,包括盲区检测系统的工作原理,BSD HIL系统的工作原理以及举例说明了在IPG环境下的自动化测试详细流程,HIL自动化测试方法明显优于传统的人工测试,在测试周期、测试覆盖度以及降低成本上具有显著优势,有利于电气功能在开发阶段功能充分验证,降低车辆电气故障率。
[1] Hyun E, Jin YS, Lee JH. Design and development of automotive blind spot detection radar system based on ROI pre-processing sche -me[J].International Journal of Automotive Technology,2017, 18(1): 165-177.
[2] 田真,张曼雪,董婷婷,等.基于V模式的整车控制系统开发及模型单元测试[J].汽车工程学报, 2012, 2(6):458-463.
[3] 戎辉,张明路,张小俊.基于Veristand的硬件在环测试系统设计[J]. 科学技术与工程,2016, 16(8):167-170.
[4]陈卫东,魏利辉. 1M点FFT算法的FPGA设计与实现[J].舰船电子对抗,2009, 32(3):100-103.
[5] Ding Chen, Jinping Ni, Lang Bai, et al. Detection method for the dynamic signal in light screen array based on constant false alarm rate [C]// International Conference on Photonics and Optical Engine -ering , 2019.
[6]付孝龙,白渭雄,李欣,等.基于多普勒频率差的拖曳式诱饵干扰检测[J].北京航空航天大学学报, 2017, 43(10):2081-2088.
[7]刘洪艳,郜丽鹏,司锡才.比幅比相测角系统信号处理技术研究[J]. 应用科技, 2003,30(10):7-9.
[9] 陈同山,朱群峰,方治.基于NI FPGA可重构I/O的SPI仿真[J].今日电子,2017(3):52-54.
[10] 张志强,王颖.一种应用于ECU HIL测试系统的PWM信号自学习模块设计[J].汽车电器, 2017(2):56-58.
Study of Hardware-in-loop Automatic Testing System for Vehicle Blind SpotDetection System
Li Shi
(Anhui Jianghuai Automobile Group Co., Ltd., Anhui Hefei 230601 )
In order to shorten the development cycle of vehicle blind spot detection(BSD) system and reduce the develop -ment cost, a hardware-in-loop(HIL) automatic testing system for BSD system is developed in this paper based on the hardware architecture of NI and the IPG software platform. The composition and working principle of the automatic testing system are introduced.On this basis, a HIL automatic testing method for BSD system is proposed, andthe BSD controller is connected to the constructed automatic testing system. Through designing testing cases, editing testing sequences and execution the sequences,a detailed testing report is generated finally to complete the automatic testing for BSD system.Finally, by using the automated test method proposed in this paper, the functional problems of the BSD controller for a certain type of vehicle are founded, and the proposed BSD system HIL automatic testing method shows great advantages over the traditional manual testing method in terms of testing cycle and cost.
Blind Spot Detection (BSD) system; Hardware-in-Loop (HIL); Automated Testing; NI Hardware Platform
U467
A
1671-7988(2019)09-137-05
U467
A
1671-7988(2019)09-137-05
李石 (1978-),男,硕士,工程师,就职于安徽江淮汽车集团股份有限公司。
10.16638/j.cnki.1671-7988.2019.09.045
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
中国自行车(2022年3期)2022-06-30
文萃报·周二版(2019年8期)2019-09-10
小雪花·初中高分作文(2019年2期)2019-06-27
网络空间安全(2019年8期)2019-03-18
知识就是力量(2018年8期)2018-08-16
课外生活(小学1-3年级)(2018年4期)2018-05-26
为了孩子(3~7岁)(2016年5期)2016-05-14
小学生·多元智能大王(2015年3期)2015-05-25
现代电子技术(2014年21期)2014-11-07
