基于模糊逻辑的混合动力汽车转向控制系统设计
2019-05-22 03:42朱忠伦
长春工程学院学报(自然科学版) 2019年1期
朱忠伦
(安徽省交通职业技术学院,合肥 230051)
0 引言
随着模糊智能控制技术的发展,采用模糊智能控制技术进行混合动力汽车的智能转向控制,提高混合动力汽车行驶的平稳性和转向的指向性,研究混合动力汽车智能前驱转向优化控制的方法,在优化混合动力汽车的转向系统设计和提高混合动力汽车的安全性方面具有重要意义[1]。当前,对混合动力汽车前驱转向的控制的方法主要有基于模糊神经网络控制和自适应控制方法,结合混合动力汽车前驱转向的非线性和强耦合特性进行控制力学分析,提高转向控制能力[2],但上述方法在进行转向控制时模糊度较大,指向性不好。对此,提出一种基于模糊逻辑的混合动力汽车转向控制系统。构建混合动力汽车转向动力学模型,采用模糊逻辑控制方法实现混合动力汽车转向控制律的优化设计,并进行了系统的硬件设计,通过实验分析得出了其有效性结论。
1 汽车转向动力学模型和被控对象描述
1.1 汽车转向动力学模型
为了实现对混合动力汽车前驱转向的稳定性控制,采用四轮联合控制和传感器信息融合跟踪识别的方法[3],进行混合动力汽车前驱转向运动状态参数的调节,构建混合动力汽车转向动力学模型,采用两轮平衡控制方法实现独立转向控制。为了实现对混合动力汽车的平衡控制,需要首先构建混合动力汽车的平衡控制数学模型,采用经典力学方法,给定各构件的初始运动条件及原动件的运动规律。混合动力汽车的运动空间分为速度坐标系Ox3y3z3、柔性运动副坐标系Ox1y1z1、轮动坐标系Ox2y2z2和地面坐标系Axyz。混合动力汽车的前轮质心为坐标系原点O,欠驱动机构坐标系Ox3y3z3的原点O取在混合动力汽车的质心上,体坐标系Ox1y1z1与混合动力汽车的转向轮具有耦合性,坐标原点O取在混合动力汽车的质心上,构建混合动力汽车运动的质心动力学方程:
(1)
(2)
(3)
(4)
(5)
其中:
(6)
(7)
(8)
(9)
(10)

(11)
sinβ=cosθ[cosγsin(ψ-ψV)+sinϑsinγcos(ψ-ψV)]-sinθcosϑsinγ,
(12)
sinα={cosθ[sinϑcosγcos(ψ-ψV)-sinγsin(ψ-ψV)]-sinθcosϑcosγ}/cosβ,
(13)
sinγV=(cosαsinβsinϑ-sinαsinβcosγcosϑ+cosβsinγcosϑ)/cosθ。
(14)
式中:m为混合动力汽车的总质量;P为车轮的惯性矩;θ为混合动力汽车纵向运动倾角,它表示机构的坐标系在Ox2轴与地球坐标系的夹角;α为柔性杆的欠驱动摆角。混合动力汽车质心的速度矢量(Ox3轴)在混合动力汽车纵向对称面Ox1y1上的正交空间与Ox1轴具有扰动性,首先求得各构件与x轴正方向的夹角,然后对位置方程对时间求导,用X,Y,Z表示混合动力汽车在平衡地面运行的阻力、侧向力和摩擦力。Mx、My、Mz分别为横滚力矩、侧向力矩和原动件驱动力矩;Jx、Jy、Jz分别为汽车轮动体系回旋转动惯量;x、y、z为混合动力汽车质心位置;混合动力汽车的纵轴(Ox1轴)与水平面(Oxy平面)间的夹角能有效调节转向角,通过上述混合动力汽车的运动状态数学模型的构建,得到了混合动力汽车的运动状态方程,采用拉格朗日法则建立机构的动力学模型,以此为基础进行平衡控制。
1.2 被控对象描述
采用阻尼参数及负载的联合驱动方法,对混合动力汽车前驱转向的运动空间进行联合控制[4],假设混合动力汽车运动在平面上,混合动力汽车运动的轮动自平衡约束条件描述为:
XRL=R×θRL,
(15)
XRR=R×θRR,
(16)
XRL-XRR=D×δ,
(17)
XP=XRM+LsinθP,
(18)
(19)
YP=LcosθP,
(20)
(21)
XRR+XRL=2XRM。
(22)
式中:R为车轮半径;L为混合动力汽车的轨迹偏差;D为两轮轴线间的距离;Km,Ke为电动势系数;MP,MR表示质量;JR=JRL=JRR、JPθ、JPδ,在笛卡儿空间内,采用严格反馈控制方法进行混合动力汽车前驱转向的末端位姿记忆性控制[5],利用比例—积分控制器进行混合动力汽车前驱转向的多模式驱动力学稳定性调节,系统的状态方程描述如下:
(23)
式中:y∈Rm为混合动力汽车装箱周期运动输出矢量;f∈Rm为动能和势能的广义坐标;u∈Rm,b∈Rm,满足rank(b)=m;Δf和d(t)分别为各杆件转动惯量,干扰项,满足:
|Δf(X,t)|≤F(X,t),|d(t)|≤D(t)。
(24)

(25)
V=MPgLcosθP。
(26)
移动副的弹性势能为:
(27)

2 控制律优化设计
考虑柔性因素,采用驱动力机构组件控制方法进行混合动力汽车转向的指向性控制设计,建立混合动力汽车转向控制的运动学、动力学模型[6],在混合动力汽车自平衡状态下,设混合动力汽车前驱转向的运动圆周轨迹Q为Rm处的任意q点的集合,表示为控制曲率矢量d1,d2,…,dq,找到一个适合的控制规则,使得混合动力汽车转向控制满足收敛条件,引入一个滑膜积分项,计算得混合动力汽车前驱转向的最优连杆长度参数和阻力参数[7],输出为:
(28)
计算得到系统动能与绕质心转动的系统动能的总和,原点A到弹簧固定点E的动能为:

(29)
式中K为正整数,表示混合动力汽车转向的恢复力矩和阻尼力矩的误差比值,对式(29)求积分,得到:
(30)


(31)
对产生的弹性反力进行模糊逻辑控制,实现了对混合动力汽车的自适应自平衡控制,且对不确定性干扰参数采用模糊逻辑控制方法进行稳态调节[8],得到原动件运动规律:
(32)

(33)

3 控制系统的硬件设计
在嵌入式的DSP环境下进行控制系统的硬件设计,基于ADSP21160基线控制协议进行混合动力汽车转向控制系统优化设计,首先进行系统的总体设计构架分析,在总线控制协议下进行混合动力汽车转向控制的程序加载和交叉编译设计,通过对混合动力汽车转向控制信息的采集和指向性的调度,进行AD控制和倍频处理,混合动力汽车转向控制的主控系统采用ADI公司的ADSP21160处理器系统,最低采样率为24 MHz,系统包括PCI总线控制模块、基线恢复模块、程序加载模块和交叉编译模块等,系统的总体设计构架如图1所示。

图1 系统硬件总体设计构架
采用MAC层交互协议设计方法,进行PCI总线控制,通过工业标准级的六线同步串口实现混合动力汽车转向控制系统的PCI总线设计和信息调度,选用VCA810作为内部晶振,通过VME总线发送控制指令到上位机中,采用PXI触发总线进行转向控制指令的时钟采样和集成控制,提高混合动力汽车转向控制的逻辑性,综上分析,得到系统的硬件设计如图2所示。

图2 系统的硬件设计实现
4 实验测试
在Visual DSP++环境中进行系统调试和仿真实验,结合Matlab 7编程进行控制算法设计,采用2个并行输入/输出控制接口进行混合动力汽车转向控制系统的基线恢复器输出接口设计,在存储器中采用DMA控制器进行电路的控制模拟,混合动力汽车转向控制模式设定为SPI和PSI两种工况模式,混合动力汽车前驱转向的位置参数采集的时间间隔为0.48 s,转动轮的质量为Mp=1.6×104kg,机构原动件的角加速为24 rim/s,惯性力矩为mr=1.13×104kg,根据上述参数设定,进行混合动力汽车转向控制设计,得到转向控制的x方向以及有方向的指向性估计误差如图3所示。

(a)y方向
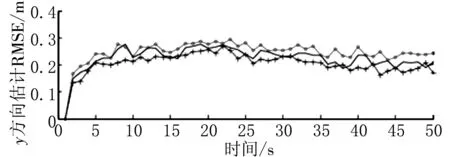
(b)x方向图3 转向估计误差
分析图3得知,该方法进行汽车转向控制的误差较小,测试汽车转向的估计和真实的跟踪性能曲线,得到结果如图4所示。

图4 转向轨迹跟踪性能分析
分析图4结果得知,该系统能有效实现混合动力的汽车转向控制,控制的稳定性较高,转向指向性明显,轨迹跟踪性能较好。
5 结语
研究混合动力汽车智能前驱转向优化控制方法,优化混合动力汽车的转向系统设计,提高混合动力汽车的安全性。提出一种基于模糊逻辑的混合动力汽车转向控制系统。采用四轮联合控制和传感器信息融合跟踪识别方法,进行混合动力汽车前驱转向运动状态参数调节,利用严格反馈控制方法进行混合动力汽车前驱转向的末端位姿记忆性控制,利用比例—积分控制器进行混合动力汽车前驱转向的多模式驱动力学稳定性调节,采用模糊逻辑控制方法实现混合动力汽车转向控制律优化设计,并进行系统硬件设计。研究得知,设计系统能有效实现汽车转向控制,控制精度较高。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
导航定位学报(2022年2期)2022-04-11
北京航空航天大学学报(2021年4期)2021-11-24
陶瓷学报(2020年2期)2020-10-27
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
中国资源综合利用(2017年4期)2018-01-22
当代化工研究(2016年7期)2016-03-20
应用化工(2014年11期)2014-08-16
航天器工程(2014年5期)2014-03-11