
基于足球比赛运动的避障系统开发设计
2019-05-24 09:48郭铜樑
农机化研究 2019年7期
郭铜樑,任 波
(晋中学院,山西 晋中 030619)
0 引言
随着科技的快速发展,机器人[1]在多个领域得到了推广应用,在农业领域的应用需求越来越大。特别是在农业人口比较少的地区,采用机械化生产可以减轻劳动力紧缺的压力,而且智能化的农业机器人可以更好地适应农业科技的发展。在我国,农用机器人的应用改变了传统农业生产模式,改善了种植户的生产劳动状态,提高了劳动效率。机器人可以担任农业生产中重复、危险的工作,且可以连续进行作业,节约了大量的资源,是现代农业必经之路。目前,农业生产中如采摘、收割、分级等工作都开始引进机器人代替。采摘收获机器人的研究开始于20世纪60年代,当时研究出来的采摘方式主要以振摇式为主,该方式容易对果实造成损伤,且采摘时无法进行选择,成熟的和不成熟的果实都采摘下来了。因此,随着计算机技术的发展,研究出智能化的采摘机器人[2-11]。
由于采摘机器人作业环境的复杂性,其识别定位和避障规划问题是必须解决的,人们研究出了许多技术手段。在识别问题中,主要研究出各种传感器进行识别定位,如视觉传感器、红外传感器及超声波传感器等[12-15]。工作时,通过传感器等手段采集环境信息,并将信息进行处理后[16-19],通过智能化的算法计算出最优路径。基于足球比赛运动决策[20-22]的避障设计采用的方法中有模糊算法、神经网络法等智能化方法[23-26]。避障系统实行的步骤是感应-建模-计算-执行。感应通过传感器实现,单靠一种传感器采集的信息不完整,本文设计为多传感器融合采集信息,以模糊控制算法进行路径计算以避开障碍物,并设计行为控制器。模糊控制器将行为分解为避障行为、趋向行为等,并将行为输出达到避障目的。
本研究基于足球比赛运动的避障系统开发设计,实现了采摘机器人的自主识别导航,提高了采摘机器人的智能化水平,旨在为农业生产机器人研发提供参考。
1 采摘机器人控制系统机构设计
1.1 控制系统结构设计
采摘机器人实现的前提是结构设计,即根据用途去设计机器人结构,并考虑设计成本等性能指标:①机器人行走机构。根据作业环境选择如履带式、轮胎式等,本文研究的机器人是在田间作业,田间起伏比较小,可选择轮胎式,轮胎式的设计比较简单,且易于控制。②驱动电动机则采用直流电动机,成本比较低,但性能高。③采摘机器人以四轮双电机同步驱动,双电机分布控制两个后轮,两个后轮则同步驱动同向的前轮(见图1),采用双电机控制易于实现机器人的运动行为,提高转向的灵活性。
控制系统的主要硬件还有计算机、图像数据采集卡及运动控制器等。其中,计算机为控制核心,对机器人控制所有操作,转向、速度、信息采集、信息处理等,还需要具备控制算法的计算及各项信息接收。图像数据采集卡则是计算机与传感器中间桥梁,因为传感器输送出来的信号是模拟信号,需要利用采集卡将模拟信号转换为计算机可以识别的二进制信号。运动控制器则是接收计算机信号控制机械操作的中心。

图1 机器人驱动结构Fig.1 Robot drive structure
1.2 传感器结构设计
传感器在采摘机器人避障设计中是关键设备,采摘机器人作业环境的信息均通过传感器采集。传感器种类比较多,现今使用比较多的有视觉传感器、红外传感器及超声波传感器等。视觉传感器通过摄像头等设备采集图像信息,是获得作业环境中障碍物与机器人位置最基本的手段,还可以确定障碍物的性状、大小,以及确定机器人行走路径的视觉导向。视觉传感器采集的图像信息会存在一些干扰信息,通过一些技术手段将图像进行处理,精确图像中障碍物的位置、尺寸信息,利于机器人避障系统的运行。红外传感器是通过发射红外线检测障碍物的位置,正常情况下,空气中的物品温度会高于空气温度,红外传感器可感应出障碍物的位置;而且红外传感器还可以调节敏感度,对作业环境中光线干扰小,且盲区小。超声波传感器则是发射一种频率比较高的机械波,穿透性比较好。本文以视觉传感器和红外传感器融合使用,将传感器采集的信息进行处理,剔除无用的数据,增强了避障系统的容错能力,避免因一个传感器信息错误无法采集信息,以确保信息采集全面,实现对作业环境信息的完整描述。
2 采摘机器人运动控制策略
2.1 运动控制模型
本文研究的避障系统安装的机器人采用的是双电机同步驱动方式,在理想状况下,左侧轮胎或右侧轮胎是同样的转向、转速,通过控制电机的电压大小就可控制机器人的速度和转向。
采摘机器人的运动模型如图2所示。在二维坐标系中,以(x1,y1)为机器人的中心点,θ1则表示采摘机器人的转向角度,取值范围为(-π,π),ω1、v1则分别表示角速度、线速度,则
x1=v1cosθ1
(1)
y1=v1cosθ1
(2)
θ1=ω1
(3)
采摘机器人的位移S,速度v1,角位移θ1,角速度ω1的计算如下。其中,Sm、Sn分别表示左右轮的线位移,Qm、Qn分别表示左右轮的转速,D0为左右轮的中心距离,D表示轮胎的直径,则
S=(Sm+Sn)/2
(4)
v1=(Qm+Qn)Dπ/2
(5)
θ1=(Sm-Sn)D0
(6)
ω1=(Qm-Qn)Dπ/D0
(7)
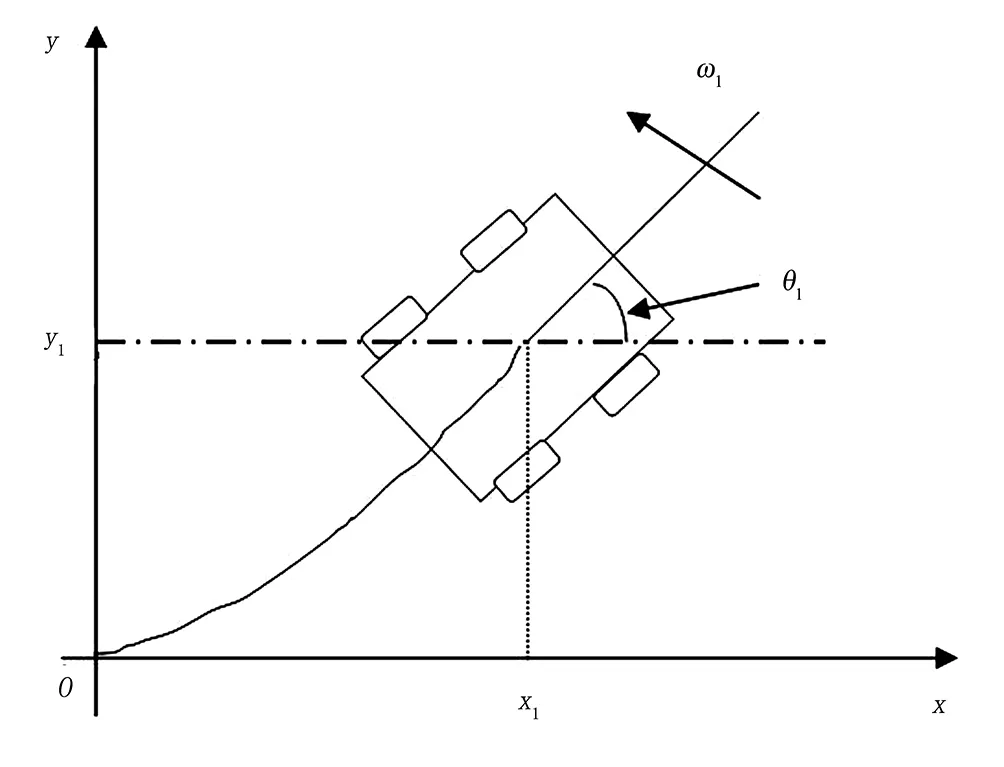
图2 采摘机器人运动模型Fig.2 Picking robot movement model
2.2 运动控制-转弯半径
Qm、Qn分别表示采摘机器人左右轮的转速;D0为左右轮的中心距离;D为轮胎的直径。
当Qm=Qn时,采摘机器人的转角速度为0,转弯半径为+∞,即采摘机器人是直线行驶。
当Qm=-Qn时,采摘机器人的转弯半径为0,机机器人做原地转圈运动,角速度则为
ω=Qm/D0
(8)
3 避障系统
3.1 模糊控制
模糊控制是以Zadeh提出的模糊集理论为基础,是将模糊集合理论和推理综合应用的控制方法。模糊控制包括4部分:模糊化、模糊规则、模糊推理、去模糊化。模糊控制的步骤是:将需要输入的信息模糊化,根据专家经验建立的知识库和规则,并结合已模糊化的信息进行模糊推理;得到的信息还无法使用,需要模糊化的逆向操作,即去模糊化,去糊化后的信息可输出。模糊控制结构如图3所示。
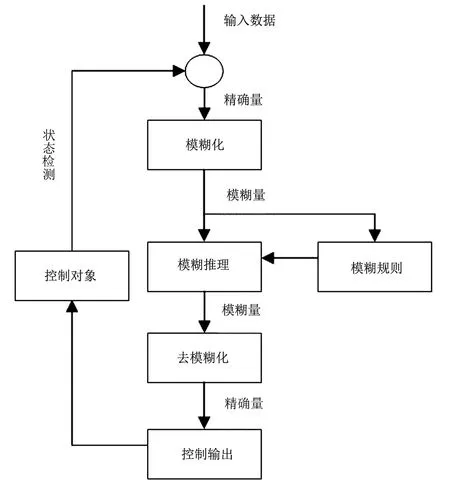
图3 模糊控制结构Fig.3 Fuzzy control structure
模糊逻辑算法改善了传统控制器过度依赖行为参数来设计机器人,模糊控制器的设计依靠经验。传统的控制器需要建立数学模型,操作比较困难,且控制过程也比较复杂。而模糊控制器的模型则是在知识库中存在,需要时直接从规则库中选择合适的模型使用,故模糊逻辑控制器适合处理避障问题的非线性问题。模糊控制器的规则库依靠设计者经验建立,在不易建立模型的复杂环境,模糊逻辑控制有以下优点:
1)不用根据现场的控制对象建立数学模型;
2)规则库是以人们经验建立的,规则比较符合人的思维方式,有易于人机交互的实现;
3)模糊控制器的构建简单,且运行稳定。
模糊逻辑控制是一种通过模拟人类思维方法的智能控制方法,在控制过程中抵抗干扰能力及适应性强,可以应用多种领域。
在模糊逻辑控制中,隶属度函数的选择至关重要,隶属度函数影响控制的准确性。隶属度函数根据控制需要进行选择,常用隶属度函数有高斯函数及Sigmoid函数等,其表达式为:
高斯函数为
f(x)=exp[-(x-c)2/2δ2]
(9)
Sigmoid函数(见图4)为
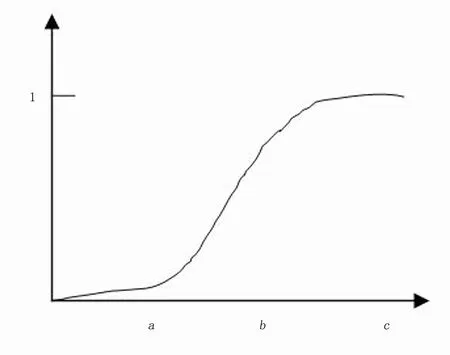
图4 Sigmoid函数图表Fig.4 Sigmoid function chart
基于机器人的鲁棒性,本文采用高斯隶属度函数,计算比较准确,且操作简单。
3.2 避障系统模糊控制算法实现
足球比赛运动是一个扰动系统,将该系统分为相对、高潮及取胜3个阶段。其中,相对阶段是时间最长的,类似避障系统中的正常状态,依靠的是队员、教练、裁判的控制,类似自主避障设计中的感应、控制算法及控制方法。避障系统中障碍物的感应就相当于队员的防守行为,控制模糊控制中心就是教练的指挥,而裁判就是机器人行为冲突时做出的决策,判断得分即执行那种行为。
4 仿真试验与结果分析
仿真试验采用双电机同步驱动的机器人为实验对象,传感器安装视觉传感器和红外传感器,以模糊逻辑控制算法控制避障系统,验证避障系统的有效性;与遗传算法、人工蚁群算法进行比较,比较不同算法路径规划效果。试验场所为1个8m×4m平台,有3个固定障碍物和1个动态障碍物,试验结果如图5所示。
图5中,3号路径为模糊控制算法控制规划,1号路径为遗传算法控制,2号路径为人工蚁群算法控制。试验表明,3种避障系统都可以达到避障效果,3号路径明显比其他两条路径优化。
由表1试验对比结果看出:模糊控制算法设计避障系统的路径优化时间明显比较短,规划出来的路径也是最短,验证了模糊控制算法的避障系统的实时性和可靠性。
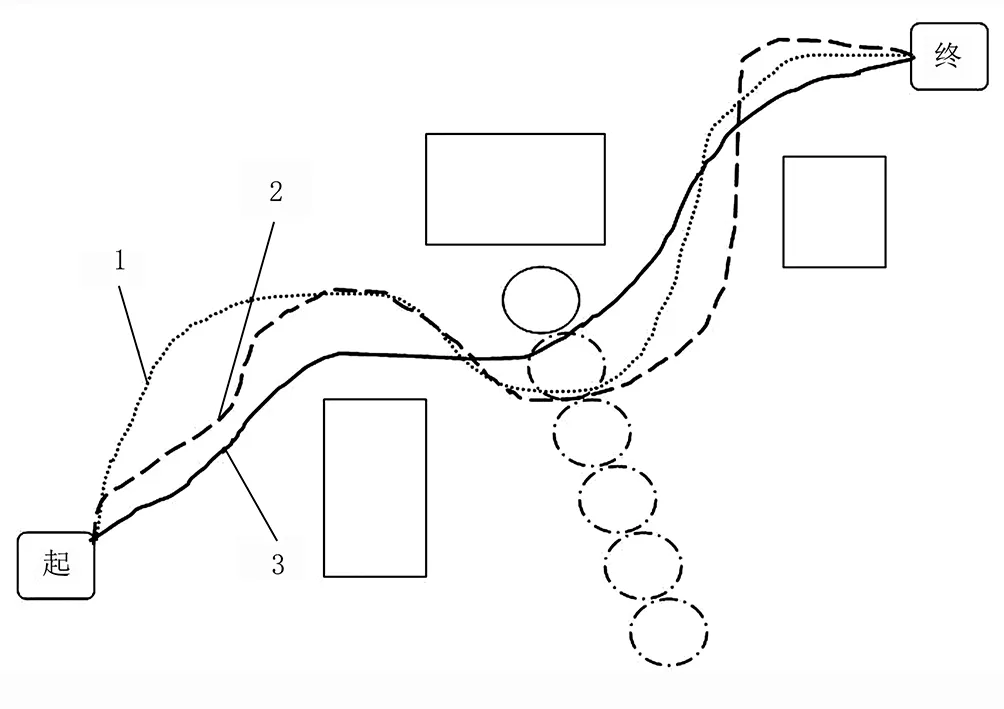
图5 不同算法避障路径Fig.5 Different algorithms for obstacle avoidance表1 路径规划结果Table 1 Path planning results
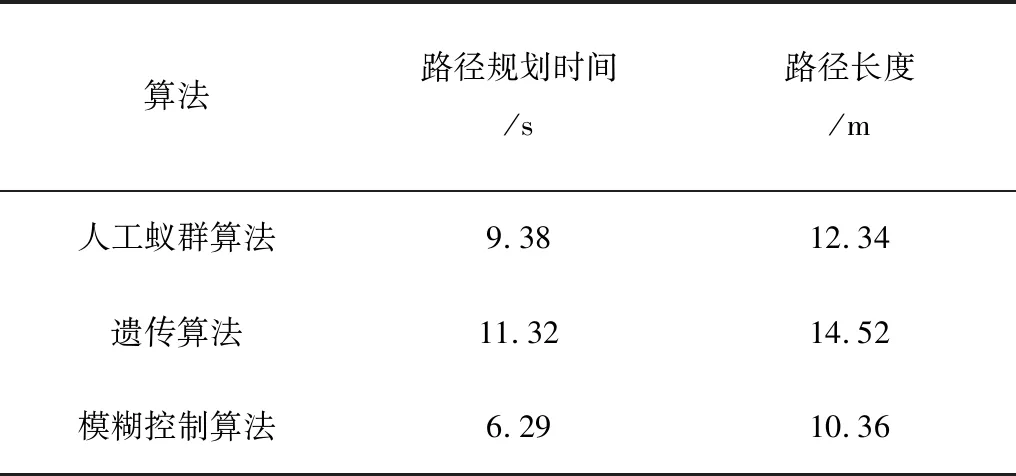
算法路径规划时间/s路径长度/m人工蚁群算法9.3812.34遗传算法11.3214.52模糊控制算法6.2910.36
5 结论
1)基于足球比赛运动的避障系统,将足球比赛运动中球员、教练、裁判和比赛规则引入避障系统设计中,用多融合传感器的模式采集作业环境信息,以模糊逻辑控制器分析障碍物信息并控制避障行为,实现了采摘机器人的自主避障设计。
2)改变传统农业机械操作对人的依赖性,让机器人具备自主导航、自主判断障碍物的位置,并自主实现路径优化。仿真实验表明:在复杂未知的工作环境,本系统可以有效避开障碍物,实时避障,完成该机器人的作业任务。
猜你喜欢
煤气与热力(2021年12期)2022-01-19
成都信息工程大学学报(2021年6期)2021-02-12
动漫界·幼教365(中班)(2020年3期)2020-04-20
电子制作(2019年13期)2020-01-14
创新作文(1-2年级)(2019年4期)2019-10-15
电子制作(2019年16期)2019-09-27
好孩子画报(2019年10期)2019-01-10
电子制作(2016年21期)2016-05-17
汽车零部件(2015年5期)2015-01-03
筑路机械与施工机械化(2014年4期)2014-03-01
