
基于模拟信号源的机载BDS接收机性能测试
2019-06-11 11:35倪育德马圆晨张心一刘鹏
中国测试 2019年4期
倪育德 马圆晨 张心一 刘鹏

摘要:针对机载北斗卫星导航系统(BDS)接收机无法进行实际测试的问题,基于对机载BDS接收机的首次定位时间(TTFF)、重捕时间和定位精度的分析与仿真,研究某一指标与相关参数的关系,提出利用全球导航卫星系统(GNSS)模拟信号源测试机载BDS接收机性能指标的测试方法。该方法结合真实飞行数据,利用GNSS模拟信号源模拟飞机运动过程,从而对飞行过程中机载BDS接收机的关键指标进行测试。测试结果表明:机载BDS接收机的首次定位时间满足RTCA DO-208对TTFF不大于5min的要求;重捕时间基本满足TSO-C146d对重捕时间不大于20s的要求;静态误差满足北斗公开服务性能规范对其不大于10m的要求,动态误差基本满足RTCA DO-208对其小于230m的要求,且测试结果均符合理论分析。
关键词:无线通信技术;性能测试;GNSS模拟信号源;机载BDS接收机
中图分类号:TN967.1文献标志码:A 文章编号:1674-5124(2019)04-0021-08
0引言
民用航空作为卫星导航的最高端用户,对机载北斗卫星导航系统(BDS)接收机的性能测试有着更为严格的要求,应具备特殊的质量标准体系和标准化的测试程序。国内外大多针对全球定位系统(GPS)接收机进行了性能测试与评估,重点制定了GPS接收机的测试评估标准及方案,而从事BDS应用终端测试技术的研究相对较少。目前,我国还没有关于机载BDS用户终端测试与评估的标准与规范。本文对国内外尤其是国际民航组织(ICAO)、美国联邦航空管理局(FAA)和美国航空无线电技术委员会(RTCA)等颁布的GPS性能测试方面的标准和技术规范进行深人研究,分析机载BDS接收机的首次定位时间(TTFF)、重捕时间和定位精度与相关参数的关系,并通过构建相应的测试平台测试BDS接收机的关键参数。研究成果将为机载BDS接收机性能测试标准的制定提供技术支持,对我国机载BDS接收机性能测试的标准化有较大意义。
基于模拟信号源的机载BDS接收机性能测试技术,具有准确、可控和可重复等优点。由于无法对机载BDS接收机进行实际测试,通过将真实的飞行数据导入模拟信号源,以测试不同飞行状态下机载BDS接收机的重捕时间和定位精度,为机载BDS接收机性能的测试与评估提供了便利的条件。
1机载BDS接收机性能测试平台
图1为机载BDS接收机性能测试平台框图,主要包括GNSS模拟信号源、机载BDS接收机、性能测试软件与数据处理软件。其中GNSS模拟信号源模拟卫星导航信号供接收机进行接收处理,性能测试软件通过远程控制指令实现对模拟信号源参数和场景的设置,以及BDS接收机的启动和指令读写。测试结束后,将模拟信号源参数与接收机测试数据送入数据处理软件进行处理,实现对机载BDS接收机的性能分析与评估。
2首次定位时间
首次定位时间是指在给定条件下,接收机从开机到利用所接收的卫星信号解算出首个符合精度要求的定位结果所需的时间。
接收机从接收到卫星信号到获得定位结果,需要对卫星信号进行捕获、跟踪、导航数据提取及位置解算等。因此,首次定位时间T可以划分为两部分即:
图2给出了不同相关器数目M下,接收机平均捕获时间与信号载噪比的关系。
由图可知,在低载噪比区间,随着载噪比的增加,平均捕获时间显著减小。随着载噪比的继续增大,平均捕获时间的减小幅度趋于平缓。伴随相关器数目的增加,平均捕获时间也相应变短。
接收机冷启动时,由于星历数据未知,需要对导航电文进行解调。在BDS系统中,D1导航电文数据速率为50b/s,因此,接收机下载整个帧需要30s,仅下载第一到第三子帧需要18s。在实际测试中,由于下载起始点未知,因此接收机冷启动时Td介于18~30s之间。
综上所述,接收机TTFF主要受信号载噪比、接收机捕获模块相关器数目以及接收机启动方式3个因素影响。
本文利用羅德与施瓦兹公司的SMBVl00A卫星导航信号源、NovAtel ProPak6兼容BDS机载接收机和自行设计的性能测试与数据处理软件,搭建机载BDS接收机性能测试平台,测试地点选在北京,分别进行500次热启动和冷启动TTFF测试,分别如图3和图4所示。
由图3、图4可知,降低信号载噪比,TTFF随之增加;同一载噪比下,冷启动TTFF比热启动TTFF大20s左右,与Td在18-30s之间的理论分析相符,且上述测试结果均满足RTCA DO-208对TTFF不大于5mm的要求。
3重捕时间
重捕时间是指当接收机由于卫星信号遭到遮挡,或接收机受到过大的动态应力而丢失所有的卫星导航信号时,从重新接收信号到获得第一个有效的导航定位结果所需要的时间。
图5对应表示了机载BDS接收机△t、Vmax分别为5s、241m/s,5s、288m/s,10s、241m/s,以及10s、288m/s 4种情况下重捕时间与载噪比的关系。
由图可知,随着载噪比的增加,重捕时间逐渐缩短。随着相关器数目增加,重捕时间也随之变短。比较图5(a)和图5(b)可得,当飞机最大运动速度增加时,重捕时间相应变长。比较图5(a)和图5(c)可知,失锁状态持续时间的增加也会导致重捕时间变长。
综上所述,接收机的重捕时间主要受4个因素影响,即信号载噪比、接收机捕获模块相关器数目、失锁状态持续时间以及飞机最大运动速度。
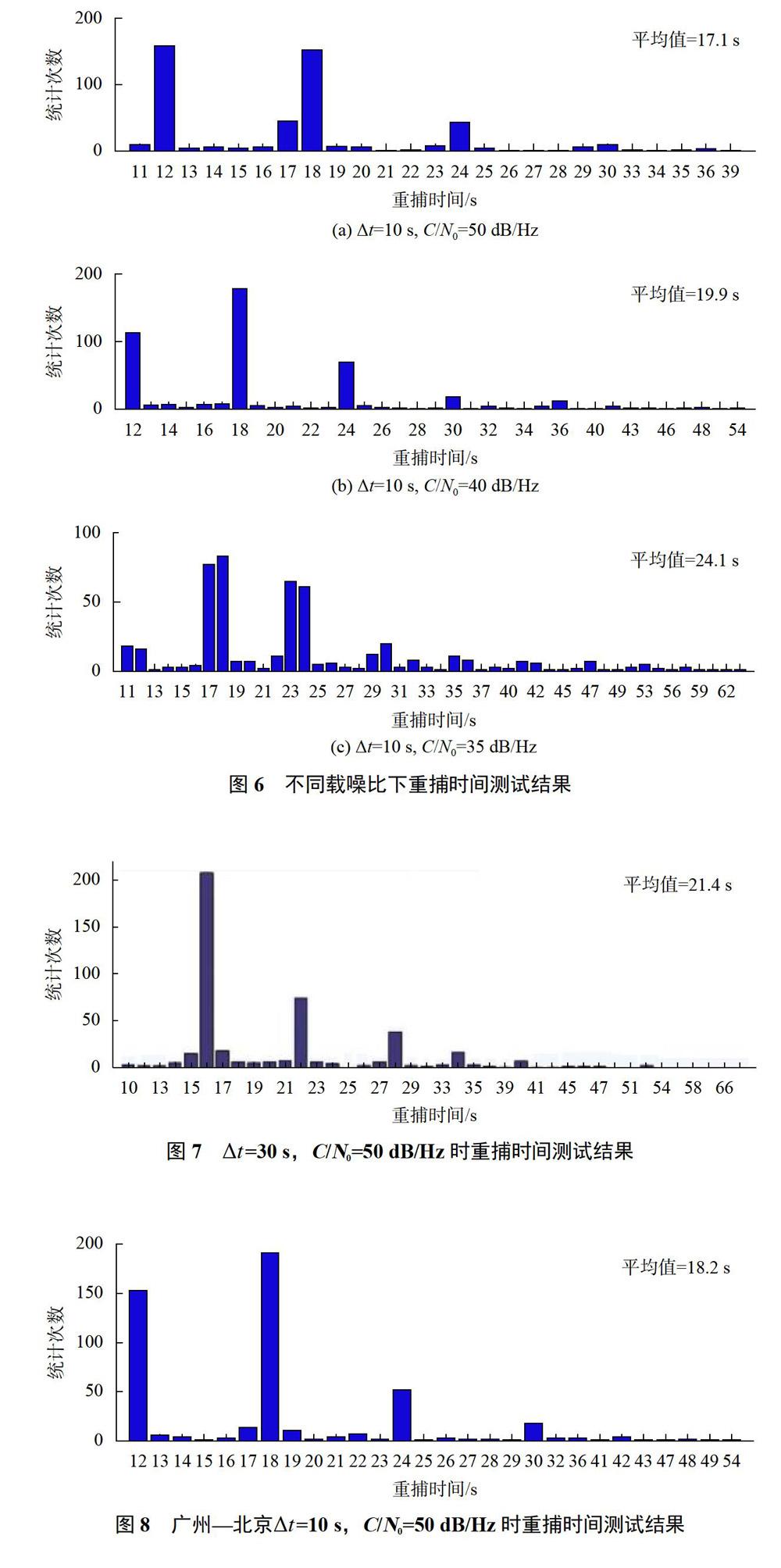
将2017年4月14日天津一哈尔滨CSC8568次航班飞行数据导入模拟信号源,对真实飞行轨迹下机载BDS接收机的重捕时间进行测试,测试结果如图6、图7所示。
图6给出了失锁时间为10s、飞机最大运动速度为241m/s时3种载噪比下机载BDS接收机的重捕时间。可以看出,随着载噪比的降低,接收机的重捕时间相应增大。图7为同一飞行过程下,载噪比为50dB/Hz、失锁时间为30s时的重捕时间测试结果。与图6(a)比较可知,失锁时间的增加将导致重捕时间增加。
下面以2018年1月16日广州—北京CSN3113次航班飛行数据为测试依据,验证机载BDS接收机在不同最大运动速度下的重捕时间,如图8所示。
与图6(a)比较可以看出,在载噪比和失锁时间相同的情况下,飞机最大运动速度(Vmax=303m/s)的增加使机载BDS接收机对卫星信号的重捕时间增加,与理论分析结果相符,且上述测试结果基本符合TSO-C146对重捕时间不大于20s的要求。
4定位精度
卫星导航接收机测量来自卫星的导航定位信号的传播延时,从而测得卫星信号接收天线相位中心与卫星发射天线相位中心之间的距离(伪距测量值),进而将它与卫星在轨位置联合解算用户位置。该位置误差为
可见,定位误差取决于伪距测量误差和该误差的放大系数PDOP。当参与定位的卫星星座被选定时,接收机的定位精度可通过伪距测量精度体现。
接收机主要误差来自接收机跟踪环路的误差,它由载波跟踪环测量误差及码跟踪环测量误差两部分组成。下面对码跟踪环测量误差进行分析。
综合热噪声误差与动态应力误差,在DO-229C给出的几种典型环路带宽Bn以及天津一哈尔滨CSC8568次航班的真实加速度a情况下,仿真了码跟踪环测量误差引起的伪距测量误差,如图9所示。
综上所述,影响机载BDS接收机定位精度的因素主要包含4个,即载噪比、飞机运动加速度、环路噪声带宽和预检测积分时间。需要注意的是,减小噪声带宽会改善码环的热噪声性能,但同时会降低其应对动态应力的能力,故要综合衡量选取较合适的噪声带宽。
定位精度测试分为静态测试和动态测试,静态测试选取同一时间下的北京和东京为测试地点,通过搭建的测试平台,对载噪比分别为50dB/Hz和35dB/Hz情况下3号卫星的伪距数据以及位置数据进行采集,并计算卫星信号源与机载BDS接收机的伪距及定位误差,分别如图10~图12所示。
由图10可以看出,载噪比的降低导致伪距测量误差增大,但误差相差较小。由图11和图12可以看出,载噪比的降低将导致水平定位误差增大,而对垂直定位误差的影响较小,同时上述测试结果满足北斗公开服务性能规范对静态误差不大于10m的要求。
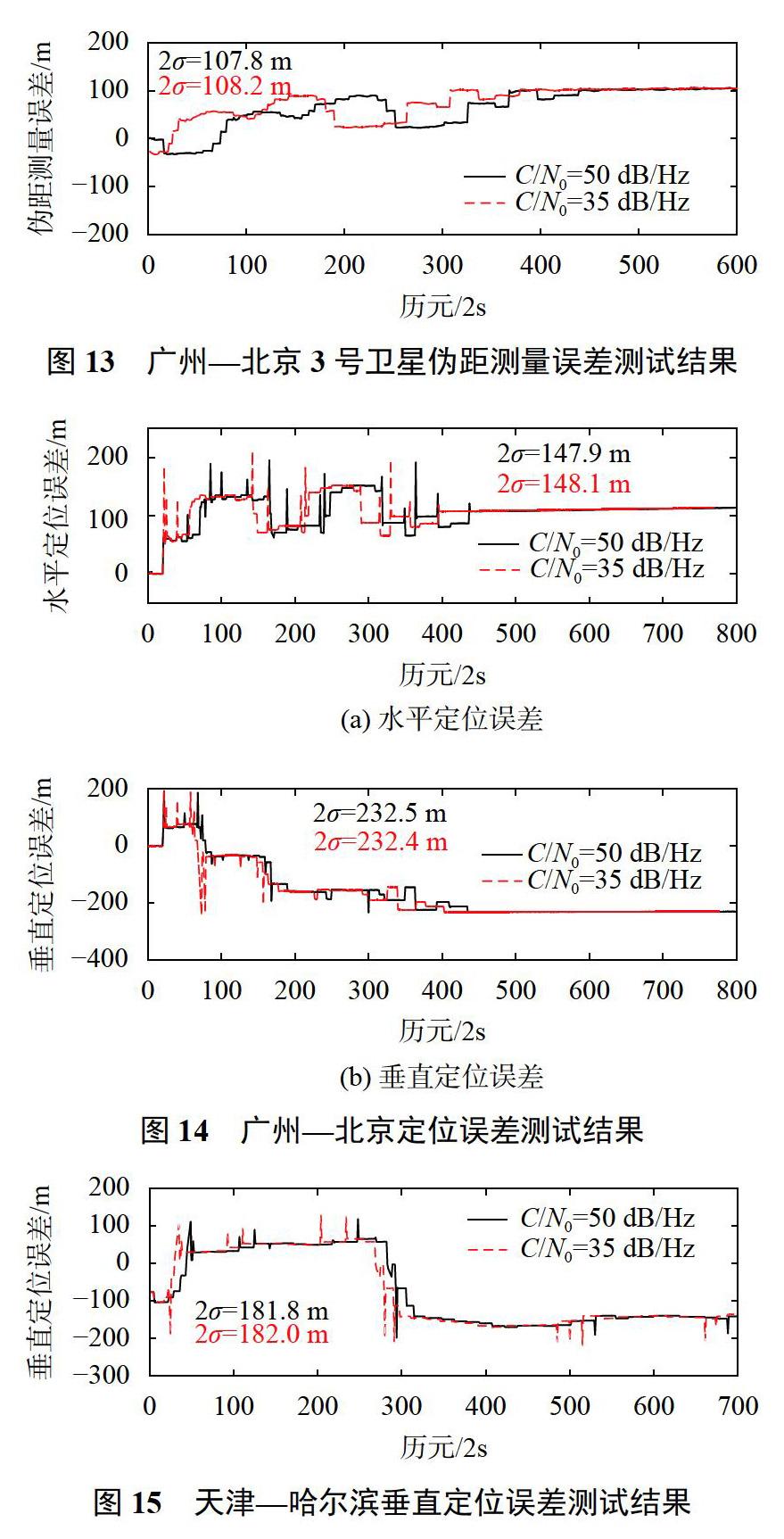
下面选取广州一北京CSN3113次航班与天津一哈尔滨CSC8568次航班真实飞行轨迹,对飞机爬升阶段的伪距误差和定位误差进行计算,测试结果如图13-图15所示。
将图13、图14分别与图10、图11和图12比较可以看出,由于飞机爬升阶段动态应力的影响,机载BDS接收机的伪距测量误差和定位误差均远大于静态误差。飞机爬升阶段,广州一北京飞行过程的最大垂直加速度为4.68g,天津一哈尔滨飞行过程的最大垂直加速度为1.73.g。故由图14(b)和图15可以明显看出,相同载噪比下前者的垂直定位误差大于后者,验证了飞机运动加速度对机载BDS接收机定位精度的影响,同时上述测试结果基本满足RTCA DO-208对动态误差小于230m的要求。
5结束语
对机载BDS接收机的首次定位时间、重捕时间与定位精度进行了分析,研究每项指标与相关参数的关系,利用搭建的测试平台对机载BDS接收机进行测试,测试结果表明机载接收机的各项性能基本满足标准中所述要求,同时测试结果验证了性能指标与主要参数的关系。研究成果对我国卫星导航终端的适航审定和标准的制定具有较大意义,同时为BDS接收机在中国民航领域的研发和应用提供支持。
猜你喜欢
软件导刊(2016年12期)2017-01-21
现代商贸工业(2016年22期)2016-12-27
企业技术开发·下旬刊(2016年9期)2016-11-23
艺术科技(2016年9期)2016-11-18
电脑知识与技术(2016年15期)2016-07-04
中国纤检(2015年3期)2015-03-13
