
机器人模仿沙漠蚂蚁找到“回家路”
2019-06-14 06:30
发明与创新 2019年9期
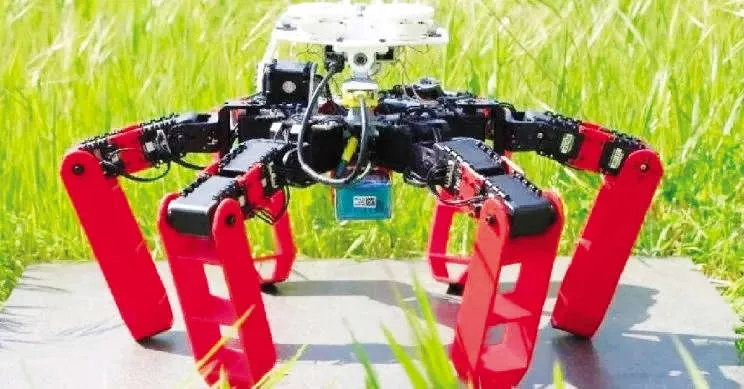
多亏了从沙漠蚂蚁那里借鉴的策略,一种六足机器人可在没有GPS(全球定位系统)帮助的情形下找到回家的路。
多数昆虫依靠分泌信息素导航,然而撒哈拉沙漠的高温可以瞬间将这种外激素烤干,生活在这里的箭蚁因而进化出一种特殊导航能力:利用特定波段阳光的偏振光来确定方向,同时记录步数,然后合并计算出回巢的准确路径。
研究人员受到启发,开发出装有“光学罗盘”和“光移动传感器”的小型六足机器人AntBot,可以走“之”字形漫步14米后返回起点,误差约1厘米。“光学罗盘”通过两个光电二极管将太阳发出的紫外偏振光转化为电信号;“光移动传感器”可通过步数、机器与地面相对速度等确定移动距离。将移动方向和距离合并计算后,“机器蚂蚁”就能确定当前相对于起点的位置。
该团队目前正致力于研发能穿行更远距离的新版本机器人。他们相信,这项技术能在GPS失灵时,提供重要的备用导航系统。研究人员表示,下一个挑战是改善传感器,从而确保导航系统在夜晚、降雨或者树下依然准确。
猜你喜欢
奇妙博物馆(2021年4期)2021-05-04
空间电子技术(2020年5期)2020-03-11
小演奏家(2018年9期)2018-12-06
电子制作(2018年19期)2018-11-14
现代职业教育·中职中专(2018年11期)2018-06-11
党的生活(黑龙江)(2017年10期)2017-11-09
作文·初中版(2017年2期)2017-03-06
新闻传播(2015年9期)2015-07-18
中国中医药现代远程教育(2014年14期)2014-03-01
物理与工程(2011年1期)2011-03-25
