
奶油蛋糕远程3D打印机器人数控协同机电系统设计
2019-06-19 00:47安嘉强汤晓华TG杨泗萍YG李天骄
食品与机械 2019年5期
安嘉强 - 汤晓华TG - 吴 婧 杨泗萍YG - 李天骄 -
(北京工商大学材料与机械工程学院,北京 100048)
一般的奶油蛋糕制作过程先选用一定形状规格的蛋糕坯料,然后将奶油平整地涂抹在坯料上,此过程称为抹坯,最后再做各种装饰,装裱花型,完成蛋糕加工工艺流程[1]。传统上这些工作都是由手工完成,效率、效果也因技师的技能不同而差别甚大。随着3D打印技术的不断成熟,其应用范围也随之扩展,在食品行业已有以巧克力、奶油、糖浆、面糊、果酱等为打印材料的3D食品打印机出现[2-3]。这种食品打印机通常是由X、Y、Z3个方向的移动副构成,其中X、Y轴组成平面操作平台,带动喷嘴在平面内扫描,Z轴在电机的带动下做垂直运动,X、Y轴每扫描完1层,Z轴移动1个厚度,X、Y轴重新扫描,如此重复逐层堆积完成整个模型的成型[4]。逐层堆积的这种成型方式喷嘴始终垂直向下,这就要求模型下方不能出现悬空结构,否则就要在下面设计支撑结构,这对于食品打印来说后期的拆除不但麻烦而且还会造成食物浪费。
随着工业化程度的提高,特别是成型路径要求的提高,双机器人或者多机器人协同工作的优势越来越受到专家学者的关注[5-7]。目前的奶油蛋糕3D打印成型工艺中都是采用传统逐层扫描堆积成型[8-9],没有出现双机器人或者多机器人协同完成奶油蛋糕成型加工,传统的逐层扫描堆积成型方式由于喷嘴的姿态不可调整,限制了蛋糕裱花造型的多样性。为了满足蛋糕成型加工运动的复杂性,尤其是装裱花型成型运动路径的多样性、复杂性,扩大机器的加工工艺范围,本设计拟采用1台三轴机械臂和1台四自由度的运动台协同完成蛋糕成型加工,对机器人以及运动台的结构进行设计,并使用微控制器加运动控制芯片的结构对控制器进行设计,开发了相应的上位机,最后对控制器及整个机电系统进行测试,以期为提升蛋糕装裱造型加工的复杂程度和制作效率提供基础支撑。
1 系统分析及规划
手工进行奶油蛋糕的加工是在转台上完成,操作者一手拿抹刀或者裱花袋,另一只手旋转转台,裱花时的成型轨迹一般是1个半径渐缩的S形螺旋,如图1所示。要完成这个造型运动轨迹需要4个自由度,其中3个联动完成锥螺旋插补,另外1个自由度控制半径的尺寸。按照这种加工思路,使用三轴的机械臂来模拟拿抹刀或者裱花袋的一只手,使用四自由度的运动台来带动坯料运动。

图1 蛋糕裱花成形轨迹
裱花时的运动方程:
x=acost,
(1)
y=asint,
(2)
z=bt,
(3)
α=ct,
(4)
式中:
a——螺旋最大半径,mm;
b——螺旋上升速度,mm/s;
c——A轴旋转角速度,rad/s;
t——时间,s;
x——X轴位移方程,mm;
y——Y轴位移方程,mm;
z——Z轴位移方程,mm;
α——A轴旋转角度,(°)。
为实现上述成形运动,设计蛋糕加工机械结构如图2所示。机械臂3个关节从左到右可以分别绕O1X1Y1Z1坐标系中的Z1轴、Y1轴、X1轴转动以控制机械臂末端位姿。机械臂的基坐标系为O1,末端坐标系为O3。运动台系统可以沿O2X2Y2Z2坐标系下的X2轴、Y2轴、Z2轴3个方向移动,并且可以绕Z4轴转动,其基坐标系为O2,末端坐标系为O4。

(5)
当前市场上的运动控制器通常只针对单个机器人,为了能同时控制机械臂和运动台协同工作,需要开发一款协同运动控制器作为该系统的控制部分。

图2 机械系统运动原理图
通常运动控制器的硬件架构有3种。第1种是以嵌入式微控制为核心,这种控制器结构简单,开发周期短,计算能力相对较弱;第2种是以微控制器加专用的运动控制芯片,这种结构由于使用了专用的运动控制芯片,计算能力较强,并且能够有效缩短开发周期;另外1种是微控制器加FPGA的结构,这种结构计算能力强,而且开放性好,但是通常开发周期比较长[10]。从开发周期以及控制器需要完成的计算量等方面考虑,选用第2种方案,使用STM32F1系列微控制搭配MCX514四轴运动控制芯片作为控制器的核心硬件进行控制器的开发。
2 机械系统设计
机械系统是完成蛋糕加工的执行部分,由于蛋糕的加工载荷小,故免强度校核,重点在于实现相应的运动。图3是依据图2实现的结构设计:左部为1台三自由度关节机器人系统,右部为一四自由度运动台,蛋糕加工空间为Φ300 mm×200 mm。机器人机座回转中心至数控台机座中心距离O1O2为680 mm。
2.1 机器人结构设计
机器人系统主要实现夹持带动奶油喷嘴以及抹刀运动,见图4。变换其末端的位姿以协同数控运动台完成预定轨迹及奶油流量,完成预期造型工作。整个机械臂由下方步进电机带动绕基座转动,为了降低手臂的复杂程度,减小机器人占用空间,机器人手腕采用差动轮系结构以控制手腕的A轴和B轴2个自由度。
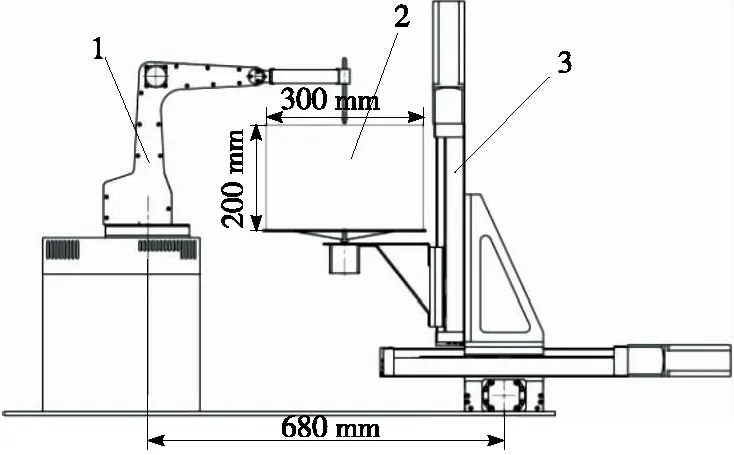
1. 机械臂 2. 工作空间 3. 四轴运动台
机械手的腕部结构是由锥齿轮组成的差动轮系,差动轮系的2个输入是由步进电机经过链传动输入,运动输出由行星轮6输出,当2个输入齿轮同向转动时,末端绕A轴转动,当2个输入齿轮反向转动时,末端绕B轴转动。
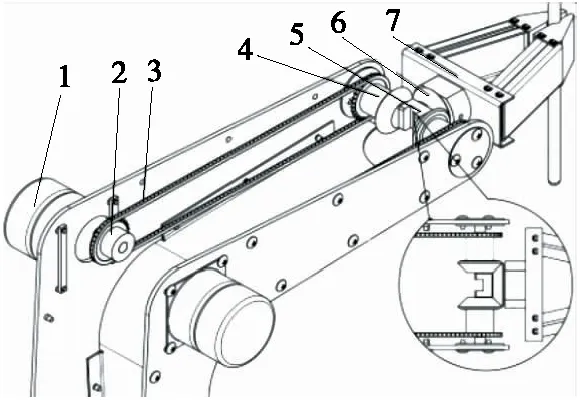
1. 步进电机 2. 链轮 3. 链条 4. 锥齿轮 5. 行星架 6. 行星轮 7. 末端手爪
图4 手腕结构
Figure 4 Wrist structure
2.2 运动台结构设计
运动台主要是带动蛋糕胚体运动,图5为运动台1个移动轴的结构,用3个类似结构进行叠加构成三轴方向的移动。各轴均由1台伺服电机带动,行程为200 mm,由于Z轴受重力作用,故Z轴电机需要有自锁功能,结构参数如表1所示。圆盘的转动由1个步进电机带动,圆盘直径为320 mm。

1. 滑块 2. 丝杠螺母 3. 丝杠 4. 导轨 5. 联轴器 6. 伺服电机

图5 运动台结构
3 控制系统设计
3.1 控制器硬件
考虑到系统对运算速度以及稳定性、开发周期等方面的要求,控制器硬件系统采用微控制加运动控制芯片的方案。使用日本NOVA公司的MCX514四轴运动控制芯片控制四轴运动台[11-12];STM32F103微控制器通过FSMC总线对运动控制芯片各个寄存器进行读写实现2个芯片间的通信。STM32F103通过自身的定时器实现对三自由度的机械臂进行控制,同时输出PWM波控制奶油泵流量。为了能实现远程个性化定制蛋糕以及后期功能扩展的需要,将STM32的4个串口引出,其中串口1用来和上位机进行通信,串口2接SIM800A DTU模块用来接收远程发来的蛋糕模型加工代码,串口3和串口4分别转换成RS232和RS485作为预留接口备用。控制器硬件结构框图如图6所示。
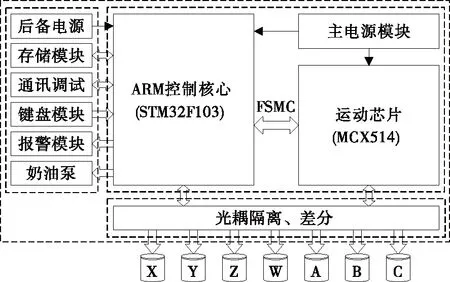
图6 控制器硬件结构框图
3.2 控制器软件
控制器软件结构以FreeRTOS嵌入式操作系统为依托,采用多线程编程模式实现各任务间并行处理以减低各任务间的耦合度。控制器的软件结构框图如图7所示,共6个并行任务。MCX514通过内部的8个16位写寄存器以及8个16位读寄存器实现四轴运动台的直线、圆弧以及S形螺旋插补功能,由于对MCX514的控制就是对其寄存器的读写,所以可以将其作为1个存储器挂在STM32的FSMC总线下作为STM32的外部存储器[13]。然后,依据寄存器的功能和命令码等,将MCX514的内部功能封装成运动控制函数供外部调用。机械臂的控制采用开源的GRBL数控系统[14],实现对3个关节的控制。
3.3 上位机
上位机用于加工系统的人机交互,主要有坐标显示、控制器加工控制、通信设置、控制器状态查看、机器人和运动台协同标定等功能,使用Qt框架开发[15]。控制器和上位机使用串口进行通信,上位机通过串口发送命令行指令用于设置查看控制器状态,图8为协同标定窗口。

图7 控制器软件结构框图

图8 协同标定窗口
3.4 远程通信
用户在远程客户端完成蛋糕定制后,需要将加工代码传给控制器。由于基于TCP/IP协议的GPRS网络拥有传输速度快、永远在线、支持透传等优势[16],使用SIM800A DTU模块来完成数据的传输,控制器接收到数据后将其保存到内部存储单元,并通过串口1发出接收到新文件的提示。远程通信的结构如图9所示,为了避免数据传输过程中出现数据丢失、出错等问题,需要在传输时加入校验等保证数据传输可靠。
4 系统搭建与测试
系统设计完成后,搭建如图10所示实验测试系统验证系统的可行性。确认接线无误后,首先使用串口将控制器和上位机建立通信连接,让机器人和运动台各轴都回到原点,再手动控制让机器人和运动台完成3次握手进行标定,标定完成之后即可将测试程序发给控制器启动加工。这里控制运动台进行一段圆弧和一段直线插补,并使用激光位移传感器对位移数据采集,将采集到的数据处理得到插补偏移距离误差,结果如图11所示。

图9 远程通信

1. 机械臂 2. 反光板 3. 激光位移传感器 4. 运动台 5. 驱动器 6. 数据接收器 7. 控制器 8. 上位机
图10 系统测试
Figure 10 System test

图11 插补测试结果
5 结论
在分析奶油蛋糕加工制作的操作行为以及奶油蛋糕成形轨迹的基础上,提出使用1台三自由度的机器人和1台四轴的运动台协同完成奶油蛋糕的抹坯、裱花等工序,这样不但可以扩大加工范围,而且由于喷嘴的位姿可以调整,避免了传统3D打印只能在垂直方向上逐层扫描堆积加工所带来的局限性,可以完成更复杂的成型轨迹,同时采用微控制器加专用运动控制芯片的结构设计了相应的控制器以及上位机系统,经测试整个系统的精度可以达到0.11 mm以内。本设计与传统的3D奶油打印机相比虽然能完成抹坯以及更加复杂的裱花造型,但在喷嘴、抹刀的自动清洗、更换以及多色奶油喷涂等方面有待进一步升级优化。
猜你喜欢
新作文·小学低年级版(2022年5期)2022-08-30
汽车实用技术(2022年5期)2022-04-02
装备制造技术(2020年11期)2021-01-26
现代装饰(2020年8期)2020-08-24
红领巾·探索(2019年9期)2019-10-09
制造技术与机床(2017年5期)2018-01-19
家庭生活指南(2016年11期)2016-12-20
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年5期)2016-03-22
中国卫生标准管理(2015年24期)2016-01-14
