基于CNN神经网络的大型停车库实时优化
2019-07-01 06:27徐良杰
武汉理工大学学报(交通科学与工程版) 2019年3期
刘 念 徐良杰 赵 玮
(武汉理工大学交通学院1) 武汉 430063) (内蒙古大学经济与管理学院2) 包头 014010)
0 引 言
汽车数量的不断增长,停车需求的日益扩张,使得对停车场的功能要求越来越高,停车场的结构也日渐复杂[1].为使驾驶员进入停车场后方便快捷的找到合适的泊位,智能化的停车引导已成为一种发展趋势.据ETCP智慧停车产业研究院联合第一财经商业数据中心发布《2017中国智慧停车行业大数据报告》统计,2016年我国停车缺口率达到50%,而平均空置率也达到51.3%,现有的车位并没有充分利用[2].停车场功能及结构的复杂化使得停车路径引导十分重要,目前驾驶员停车通常采取随机停放的方式,常会发生在停车场内绕圈搜寻合适空车位的现象,使得停车场内部交通混乱,极易造成拥堵.停车场内滞留的怠速车辆还会对停车场内空气质量产生局部污染,降低停车场服务质量[3-4].若能合理引导驾驶员由较为通畅且行驶距离较短的路线前往目标车位停车,将提高停车场效率, 其中实时的停车路径智能算法的选择十分关键[5].
现有很多研究都集中于交通系统整体的优化上,赵玮等[6]通过实地采访和跟踪记录,采集乘客换乘的历史数据,对数据整体分析后进行整体火车站换乘系统优化,提高换乘的整体便利性.目前停车路径优化中常用的是Dijkstra算法[7-8],从起始节点开始,依次访问其他最靠近的节点,并逐步进行迭代检查的方式来找到至目标节点的最优路径.虽然该方法可以搜寻出静态情况下至目标车位的最短路径,但在实际情况下,由于没有考虑实际车流量,“最短”路线不一定会提高车辆的通行效率.A*算法等[9]启发式算法则存在搜寻速度较慢,且可能会出现局部收敛,最终路线不一定距离最短等问题.常用的停车检测手段为地埋式或悬挂式感应,但该手段无法检测正行驶在车道内的车辆,一般只用于停车位状态检测[10].
环境会对驾驶员产生影响,若提前用技术手段获取相关视觉信息并进行判断,可增加对驾驶环境的认知[11-12].Zhao等[13-14]在路面设置障碍和传感器,来实地测试驾驶员对危险的判断能力,利用了深度学习和迷糊理论建立的驾驶员对冰雪环境下危险的判断和避让能力模型.运用CNN卷积神经网络算法可以通过直接识别停车场内各停车位及通道图像,获取停车位状态以及通道路径上的实时流量状态,从而在静态最短距离路径的基础上同时考虑路径拥挤程度,综合选择行驶至停车泊位处时间较短的路径.
1 停车实时优化问题
1.1 停车模型的建立
大型停车库形式多种多样,建立一个停车场的简化模型进行研究.本文选取停车场包含一个出口和入口,每个车位前有一条行车通道相连接,可以依此进入车位.以停车位为网络节点,将停车场化为点线结合的网络,其中Pi为停车位节点(i=1,2,…N,N为停车场总车位数),xnp赋值为停车位距离入口(或出口)的距离.当停车位有车辆停放时该处停车位赋权值0,无车辆停放时赋权值为1.假设车辆在停车场内以速度v匀速行驶.
停车场通道交叉处定为通道节点,用Ck(k=1,2,…)表示为通道节点,R
1.2 车辆最优停车路径评价
在每段停车场通道R上进行车辆流量识别,根据每段通道上的车辆数确定路段通行权重α.根据驾驶员最终目标车位,判断从该车位至相邻节点C的通道路径距离长度,乘上权值α后再次比较并选取较小的节点.将选取的节点C再依次按上述步骤捕捉下一节点直至找到停车场出口(入口).将所选取的各节点依次连接起来则为最终停车优化路径.整体停车实时优化流程见图1.
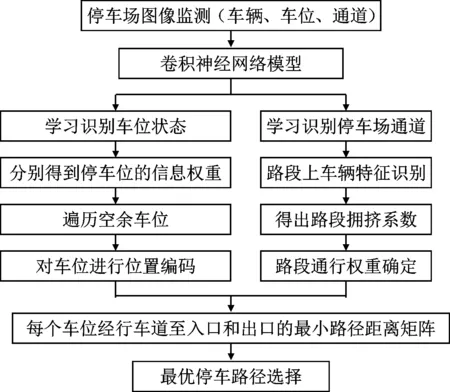
图1 停车实时优化流程
2 CNN停车图像识别
2.1 CNN卷积神经网络
CNN卷积神经网络是一种层次模型,输入数据后(尤其是图像数据或音视频数据),机器通过学习诸如边缘和曲线之类的低级特征来进行识别与分类,继而通过一系列卷积层级建构出更为抽象的概念.CNN卷积网络的核心之一是卷积核,也被称为滤波器.简单来说,训练CNN在相对意义上是在训练每一个卷积层的滤波器.
卷积神经网络建立的深度模型[15],输入的数据是未经处理的原始形式,在数据层之后再通过层层操作对数据特征进行“学习”和“提取”.整个所有的操作层可以看做一个复杂的CNN函数,函数损失由两部分组成,一部分为模型参数的正则损失,一部分为数据损失.整个模型在运行训练过程中,会依赖最小化损失函数来学习模型参数,最终误差还会存在反向传播的情况.模型简单来说可以看做将原始数据中的隐含特征提炼出来,再进行逐层抽象,不同操作的对应卷积神经网络中的不同“层”.卷积操作对应的是“卷积层”,池化操作对应的是“池化层”等等,其中“层”可以进行不同组合的堆叠.最后的目标任务形式化为目标函数,同时模型产生的误差会有最后一层逐层向前传播反馈,并更新模型每层的参数,更新参数之后再次正向前馈,循环反复直到卷积神经模型收敛,得出结果,见图2.

图2 卷积神经网络基本流程
卷积神经网络的根本核心是进行卷积运算.以二维场景中的卷积为例,输入图像后,每个像素作为一个小单位可化为数字矩阵,其对应卷积核为另一个规模较小矩阵.
2.2 改进CNN方法下的图像训练与识别
本文采用改进CNN算法,训练车辆参数模型,获取停车场通道上车辆数及车位状态情况.通过停车场视频监控实时监测车辆目标,建立停车场内状态参数矩阵方程,且保存到数据库中.其中车辆图像的识别与采取YOLO算法,将输入图像划分为S×S的网格,当某物体中心落在网格内时,该网格负责检测该物体.同时每个网格还负责预测边框、边框的置信度以及类别概率.其中边框为B个,类别数为C个,最后预测被编码为S×S×(B*5+C)的张量.具体YOLO算法下的图像识别见图3.每个网格预测多个边框,这样在训练时就仅需一个边框预测器来锁定目标物体.每个预测器专业化的预测特定大小、长宽比或目标类别,同时指定与目标重叠度最好的预测器来负责,就能改善整体的识别正确率.
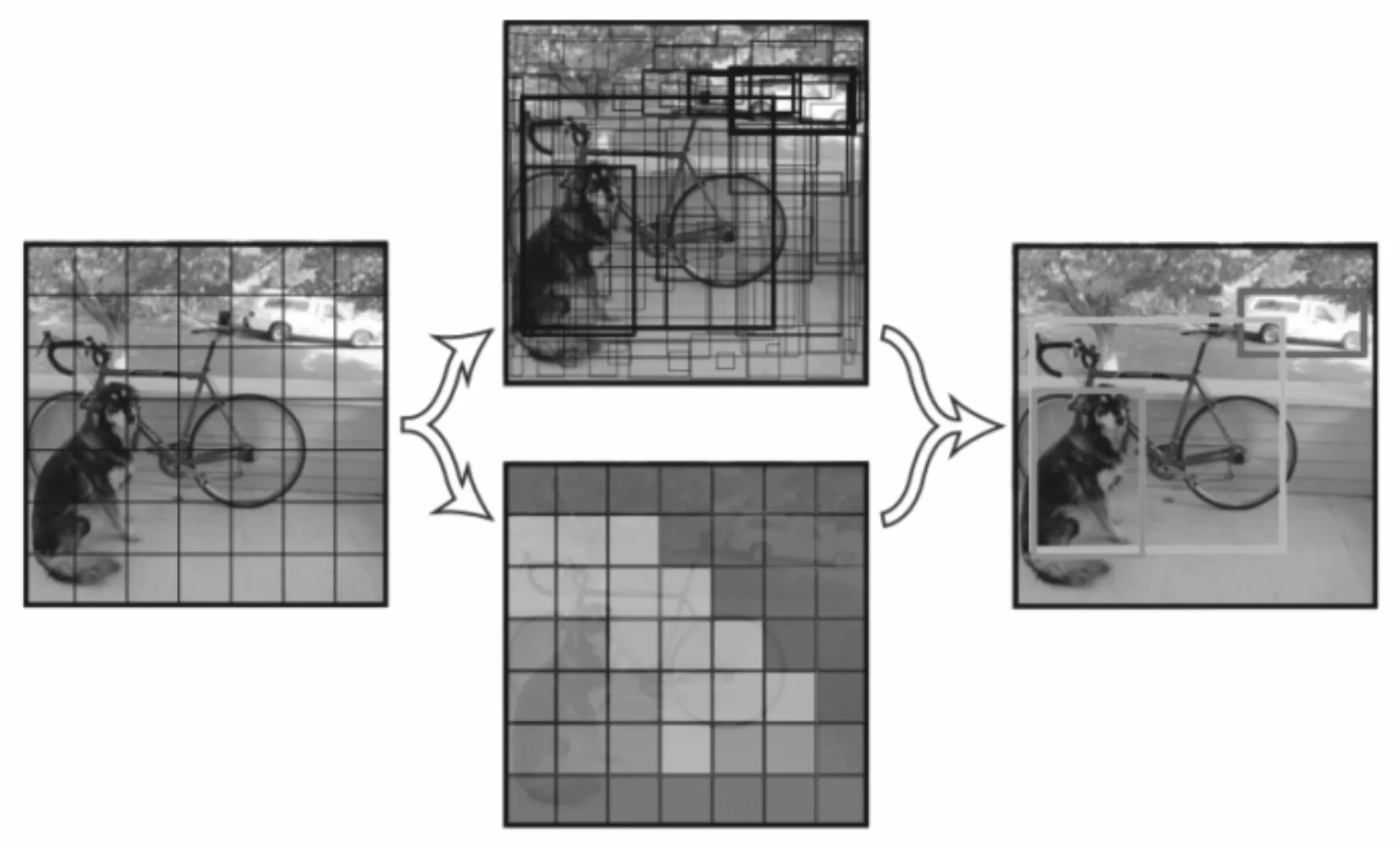
图3 YOLO算法模型下的图像识别
与常规CNN网络图像识别相比,YOLO算法简易且快捷,它基本可以在不到25 ms的延迟时间内处理动态视频,具有很高的实时性.
3 实时停车路径优化
在停车场网络中,最终目标为驾驶员停车至目标车位总时间最短,即最优选择停车路径较短且停车延误时间最小(因等待错车或拥挤排队)的路径.在视频分析车位状态,检测出节点间实时流量后,停车路径优化为
(1)

(2)
所检测出的每段R上的车辆将最终计入整体节点间的交通交通量中,通过计算筛选每一小段“通畅”路段,以最短时间驶入目标车位.
在停车的最短路是基于“最少”停车时间的,并作为算法方程的目标结果.利用在停车场所获得的实时车流现状,并进行道路信息和车流的分析,将停车场交通状况作为约束条件考虑,以此建立起实时的停车道路优化模型并找寻最佳停车线路.
4 案例分析
以武汉市宜家停车场为研究对象,通过分析其基本布局和结构进行停车优化.宜家综合停车场由若干片区停车场组合而成,分区情况及各区车位编排见图4.图5为截取其中某一分区停车场平面示意图.

图4 武汉宜家停车场平面分区布局
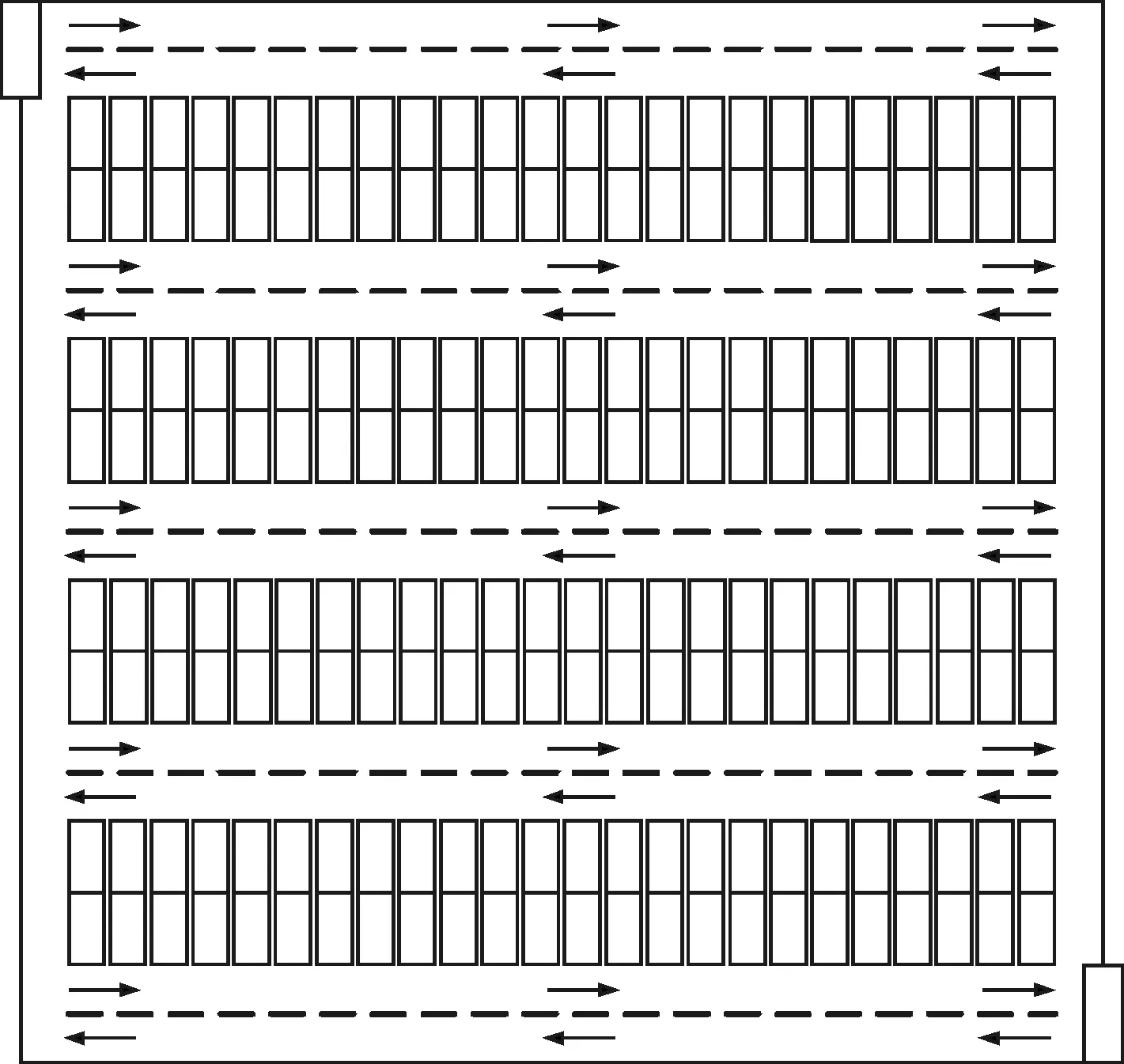
图5 武汉宜家部分分区停车场平面示意图
运用上述优化方法选取武汉市宜家大型停车场为实验参照,首先对停车场状态进行学习与识别.拍摄实际停车图像输入神经网络模型进行机器训练与识别,最终可输出识别图像,监控附近车辆检测成功率可达85%,画面中远处车辆虽然会出现检测不清的状况,但可以通过其他角度摄像弥补该问题.
通过训练行人图像,停车场内行人也可被检测出来,在一定程度上更加可以增加实时优化的准确性.
然后调查宜家停车场驾驶员的停车量、平均速度等为仿真参数.比较优化前后选车位时平均车速行驶车速、停车时间、停车延误时间等,见表1.根据上述优化算法编辑C++程序,平均车速设定为15 km/h,在相同的停车量下仿真运行一天的停驶状况.由表1可知,优化后停车延误降低,停车平均耗时约减少63%.
表1 优化前后后停车时间对比min
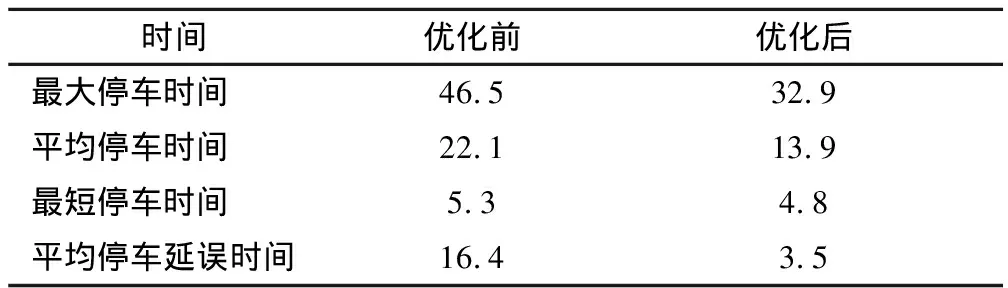
46.532.922.113.95.34.816.43.5
通过实地模拟实验,对CNN优化算法车辆监测情况进行了效果评估.图6为不同车辆数下,车辆监测错误率情况.根据停车场视频监控器所能拍摄的视野范围内的车辆数,总的监测错误率在15%以下,且由不同角度的图像检测,将能进一步降低错误率的影响.天气也会对图像识别及交通状况产生很大的影响[16].图7为天气不同时的检测错误率累计曲线,不同天气情况下,检测的整体效果仍可以达到精度要求的.若为室内停车场,天气情况的影响将会更小.整体来说该方法可以达到检测精度的要求.
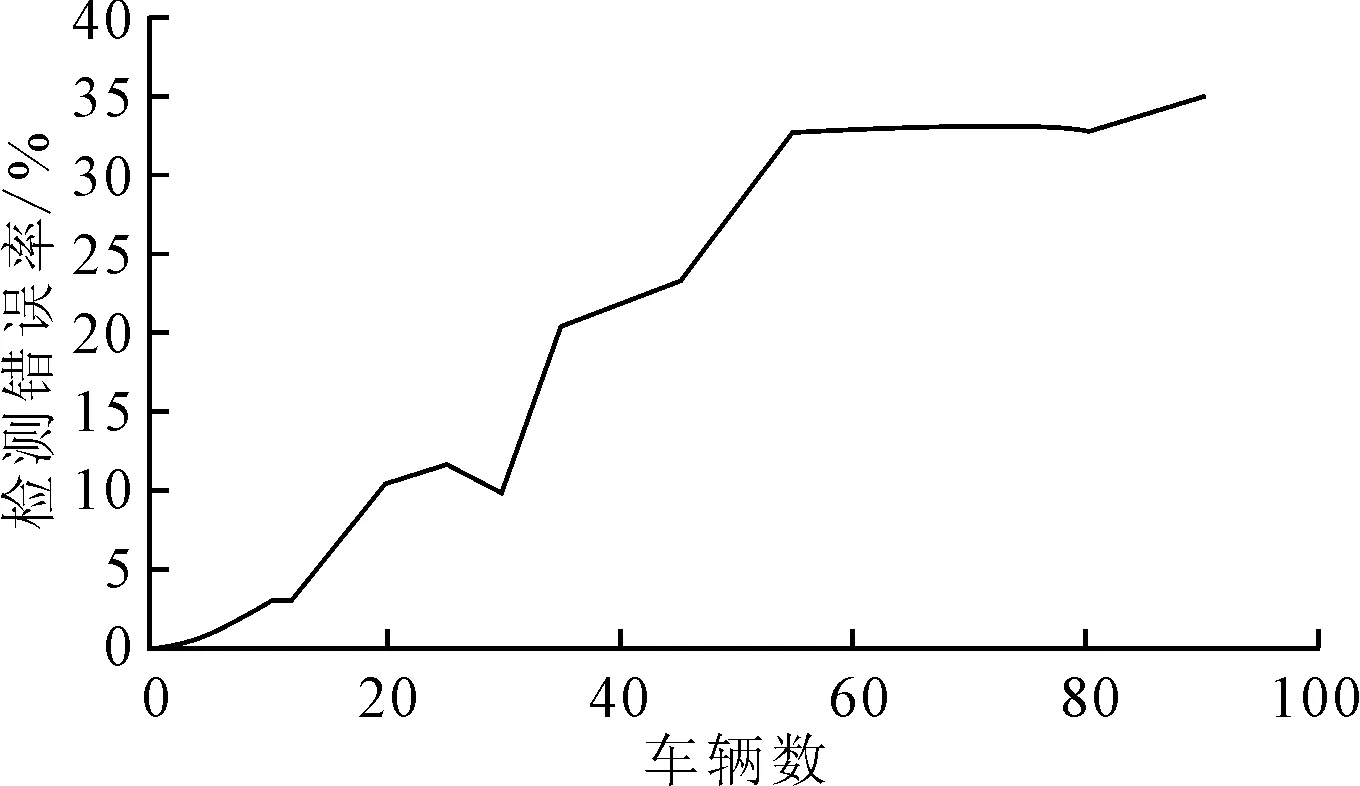
图6 不同车辆数下车辆监测错误率
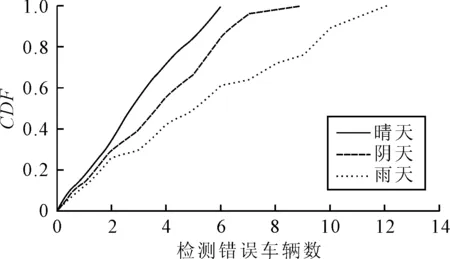
图7 不同天气情况下车辆监测错误车辆数累计情况
图8对比分析了四种不同停车方式分别与本文所采用的优化停车方式的时间比.在初始停车情况相同的条件下,四种停车方式分别为本文所采用的优化停车、就近选取停车位停车、随机停车以及选取最远的停车位停车.其中A方式为基于CNN的优化停车方式、B方式为驾驶员第一选择最近的停车位、C方式为驾驶员随机停车、D方式为驾驶员选择最远的停车位进行停车.对比分析可见,本文的优化停车方式降低了整体停车时间,增加了停车效率.
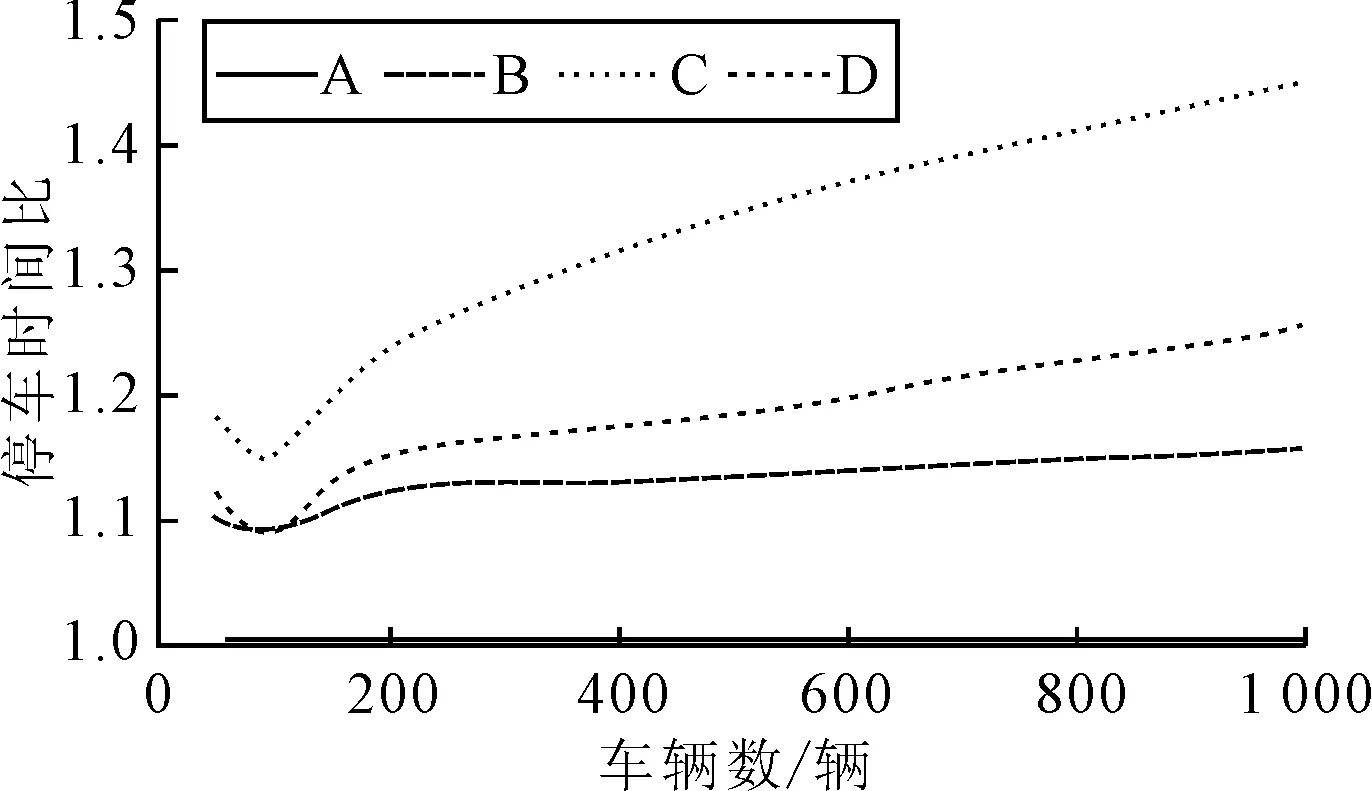
图8 不同停车方式与本文优化方式停车时间比
5 结 束 语
智能停车是未来大型停车场的发展趋势.本文基改进的CNN卷积神经网络算法重点研究了停车数据的采集与分析,从而选取拥挤程度小的较短路径,达到了大型停车场交通组织优化的目的.并以武汉市宜家停车场为对象进行实证研究,验证了算法的有效性.研究方法可以推广到具有一定规模的其他大型停车场,具有较高的现实意义与前瞻性.
本文用神经网络的方法实时的视频检测方便快捷,且能大幅提高停车效率,更加容易进行停车场交通组织.在停车数据采集与分析上具有前瞻性,是未来高效智能停车的趋势.
猜你喜欢
动漫界·幼教365(大班)(2021年4期)2021-05-23
汽车画刊(2020年5期)2020-10-20
英语文摘(2020年7期)2020-09-21
阅读(快乐英语高年级)(2020年6期)2020-08-28
祝您健康·文摘版(2020年3期)2020-04-09
数学大王·低年级(2019年12期)2019-08-14
环球时报(2019-07-24)2019-07-24
现代家长(2018年11期)2018-01-05
读书文摘·经典(2017年8期)2017-08-09
喜剧世界(2016年14期)2016-11-26