
带DC绕组的正弦磁阻电机矢量控制
2019-07-02 07:17蒯松岩
微特电机 2019年6期
熊 树,张 赫,蒯松岩
(1.淮阴师范学院,淮安 223300; 2. 中国矿业大学,徐州 221116)
0 引 言
永磁电机由于其高性能、高功率因数和起动转矩大而得到广泛应用。但制造高性能永磁体需要稀土资源,使得电机价格上涨。同时,永磁材料在高温下会发生去磁效应,影响电机的稳定性。因此,开关磁阻电机由于不需要永磁体,结构简单,鲁棒性好以及成本较低,而在航天、轮船和发电等领域有着广阔的应用前景。
传统的开关磁阻电机采用不对称半桥电路,单极性电流对每相独立供电。文献[1-3]证明了双极性电流也能应用在开关磁阻电机上。在双极性激励下,电机虽然噪声得到较好的控制,但是平均转矩有所减小[4-5]。文献[5]对正弦激励下的开关磁阻电机的转矩进行了深入分析,并得出了单位铜耗下最大转矩电流比控制策略,但是在这种控制方法下部分角度会产生负转矩。文献[6]提出一种利用转矩内环来抑制电机转矩波动的控制策略,但是转矩观测器较难实现。
本文针对传统六相直流偏置磁阻电机的问题,对直流偏置磁阻电机转矩特性进行分析,改进了绕组连接方式。然后,通过仿真参数建立电机的数学模型,在Simulink软件中建立此电机的矢量控制系统模型。最后,通过实验验证了在此控制系统下,能够减少开关器件的使用,达到较好的转矩控制效果。
1 电机结构改进及功率变换器
传统的12/10开关磁阻电机如图1所示。定子每一极上有一绕组,相隔180°的两极上绕组相互串联形成一相,12个定子极则有六相。由于转子极上无绕组,故能承受更高的温升。此电机遵循“磁阻最小原理”,各相在特定时刻依次通电,产生的磁力线“拉”着转子不断转过一定的角度,使转子不断运动。为使各相分别单独导通,传统磁阻电机采用不对称半桥电路作为主电路,如图2所示。

图1 传统12/10磁阻电机
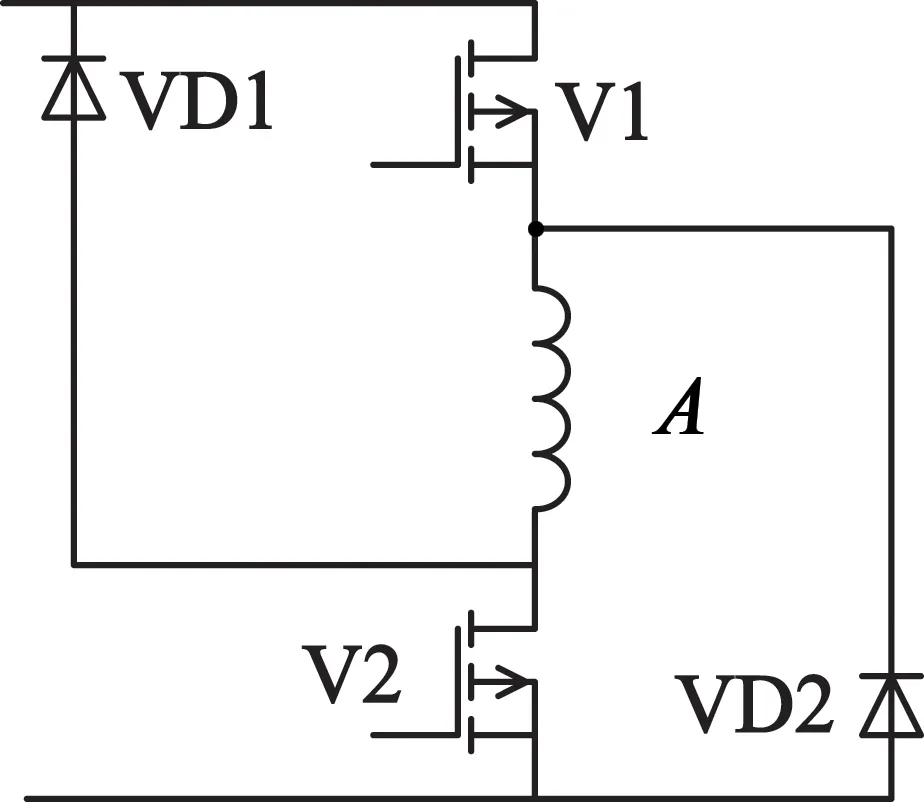
图2 一相不对称半桥电路
开关磁阻电机转矩公式:
(1)
此电机采用带DC偏置的交流电流驱动,则电机转矩可以表示:
同时:
ia=I1cosθ
(3)

(5)
id=I1cos(θ+π)
(6)
(7)

(8)
因此:
同理:
(ie+If)2=(-ib+If)2
(10)
(if+If)2=(-ic+If)2
(11)
电机转矩可以简化:
由式(12)可知,如果IDC由独立励磁绕组供电,则A相和D相可以由同一逆变器桥臂供电,类似的,B相和E相,C相和F相也可以由同一逆变器桥臂供电。图3为改进后的带有励磁绕组的开关磁阻电机,励磁绕组通入直流电流,电枢绕组通入双极性正弦交流电流。

图3 12/10 DC偏置磁阻电机结构图
功率电路连接如图4所示,G为直流励磁绕组。A相和D相,C相和F相,E相和B相分别反向串联,合并为新的U,V,W三相。合并之后,原本六相绕组变为三相绕组,可以采用三相全桥电路。同传统电机不对称功率电路相比,节省了一半数量的开关器件,控制方式也变得更为灵活。

图4 合并后的绕组连接以及功率电路
2 新型电机数学模型
电压方程:
(13)
运动方程:
(14)
磁链方程:
(15)
式中:φi为各相磁通,Li为各绕组自感,Mij为各绕组互感,Mif各相交流绕组与直流绕组之间的互感,If为直流绕组电流。
利用Maxwell软件分析电机电感参数。样机定子为12极,极弧系数0.4,转子为10极,极弧系数0.5,额定输出功率15 kW,额定电压380 V,额定转速为1 000 r/min,直流绕组为14匝,交流绕组14匝。其他具体参数如表1所示。
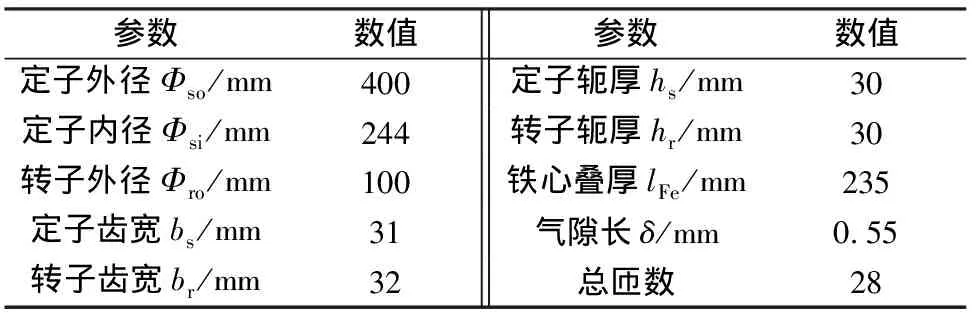
表1 样机参数
仿真结果如图5所示,可以看出,在仅A相和A相DC绕组通电情况,相较于A相交流绕组与DC绕组互感,A相与其他相绕组的互感值很低,可以忽略不计;同时,因为交流绕组和DC绕组匝数相同,A相交流绕组自感和A相与DC绕组的互感波形几乎重叠,二者数值上可认为相等。A相电感情况可以推广至其他相。

图5 A相互感
磁链方程可简化:
(16)
反向串联后磁链方程:
(17)
反向串联后,U,V,W三相电感为原本两相电感之和。由于电机本身的结构特性,导致了六相自感波形互差60°,A相和D相之间的自感波形相差180°,斜率相反。B相和E相,C相和F相也是如此。
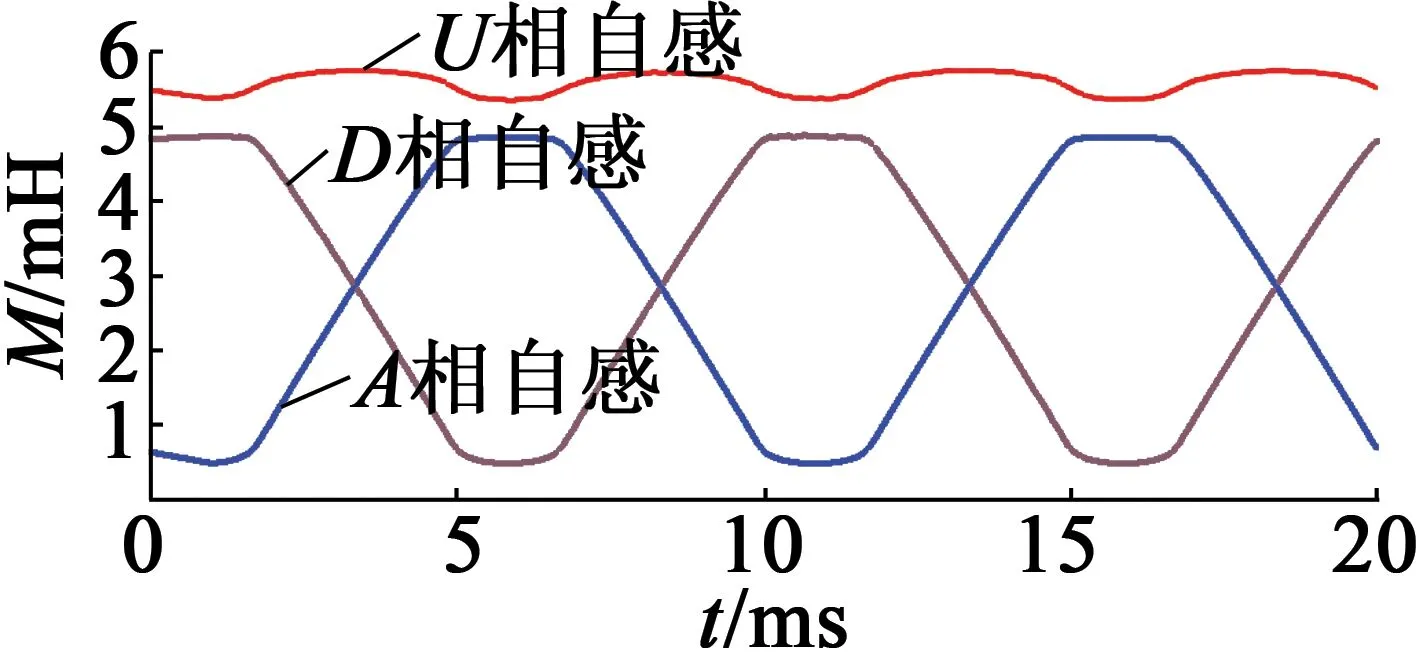
图6 A相,D相以及反向串联后U相自感
由于U,V,W三相电感波动不大,所以将磁链方程代入电压方程,可得反向串联后的电压方程:
(18)
式中:k分别代表U,V,W相;Lk为反向串联后的自感,Mkf为反向串联后的互感。
由以上内容,可将式(2)电磁转矩方程化简:
机械方程:
(20)
式中:T为总电磁转矩;TL负载转矩;J为转动惯量。
3 Simulink建模
此电机自感和互感均可用余弦函数来近似。以下是互感近似函数:
M=M0+M1cos(θ+φ)
(21)

(22)
式中:φ为初始相位。由上述仿真可计算出Mmax=0.004 8 H,Mmin=0.000 5 H,那么M0=0.002 65 H,M1=0.002 15 H。
在Simulink中可以根据电机数学解析式建立模型。图7是根据电机的电压方程和转矩方程建立的电机一相模型,图8是在图7的基础上根据运动方程和机械方程建立的完整磁阻电机模型。

图7 电机一相模型
图7中,输入从上到下依次为角度,即角度信号,直流励磁电流,一相电压;输出为一相转矩和电流。

图8 电机模型
图8中,输入为三相电压、励磁电流、角度信号和负载转矩;输出为电磁转矩、各相电流以及角速度。
4 矢量控制
此电机可以将DC绕组视作励磁绕组,交流绕组视作电枢绕组,进行矢量控制。
在矢量控制之前要进行坐标变换,把三相静止坐标系变换到旋转的d,q坐标轴。首先,进行3/2变换,将三相静止变换到两相静止坐标轴。按照变换前后总功率不变的原则,变换公式:
(23)
在得到两相静止坐标系后,需要进行Park变换,将两相静止坐标系变换到正交旋转坐标系:
(24)

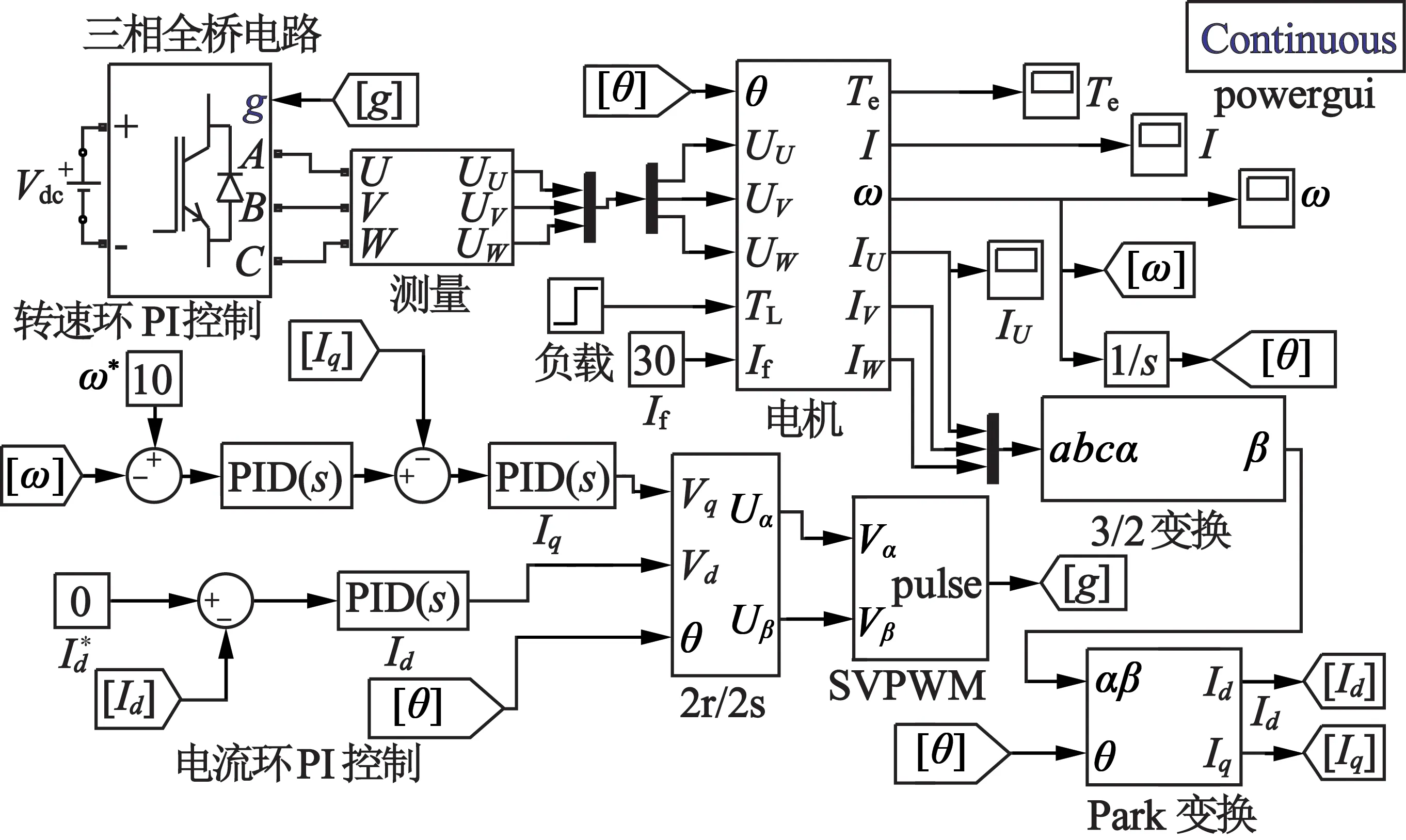
图9 开关磁阻电机矢量控制系统
5 仿真结果
初始给定负载转矩20 N·m,在1 s时变为30 N·m,励磁电流30 A,设定角速度为10 rad/s,调节合适的PI控制器参数,得到如图10~图12的结果。可以看到,在1 s时转矩变化,系统能够快速进行调节,使转矩保持在30 N·m左右,同时转速仅有微小波动,很快就保持稳定,证明了此系统具有良好的动态性能;稳态时,转矩波动不超过2 N·m,转速波动不超过0.5 rad/s,稳态性能同样较好。
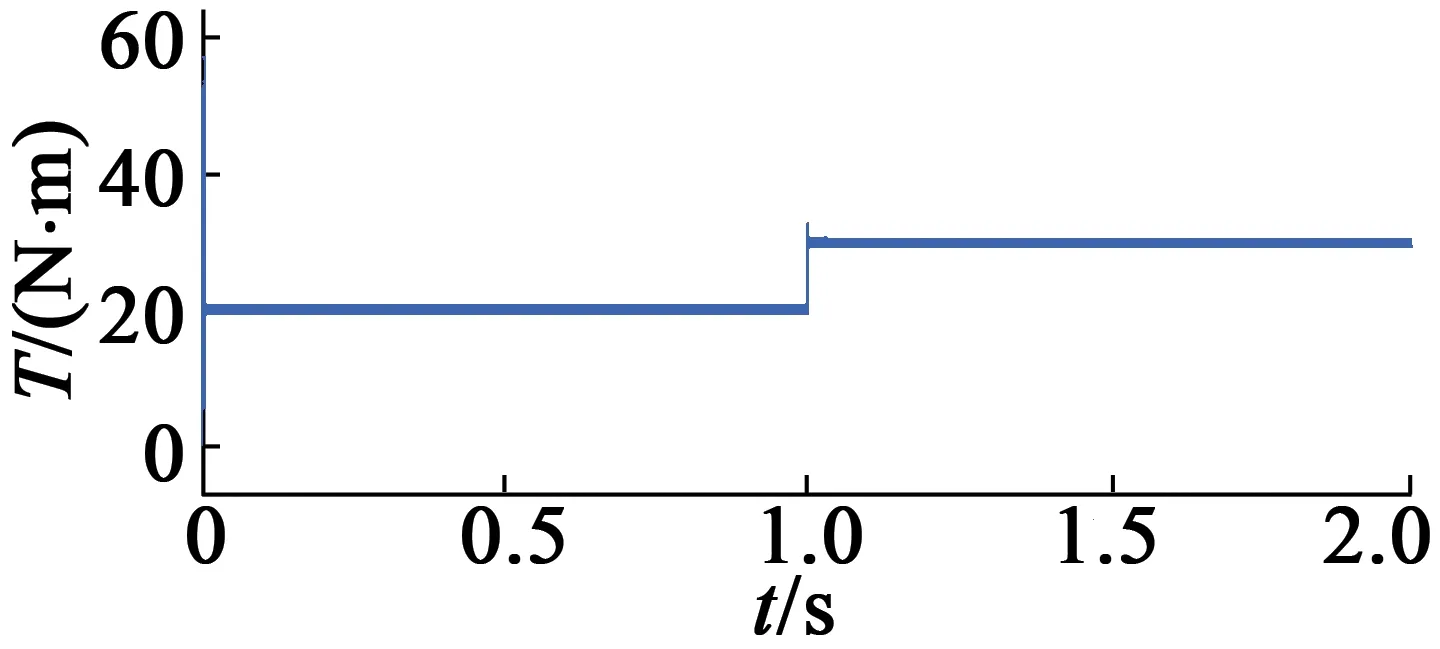
图10 转矩波形

图11 速度波形
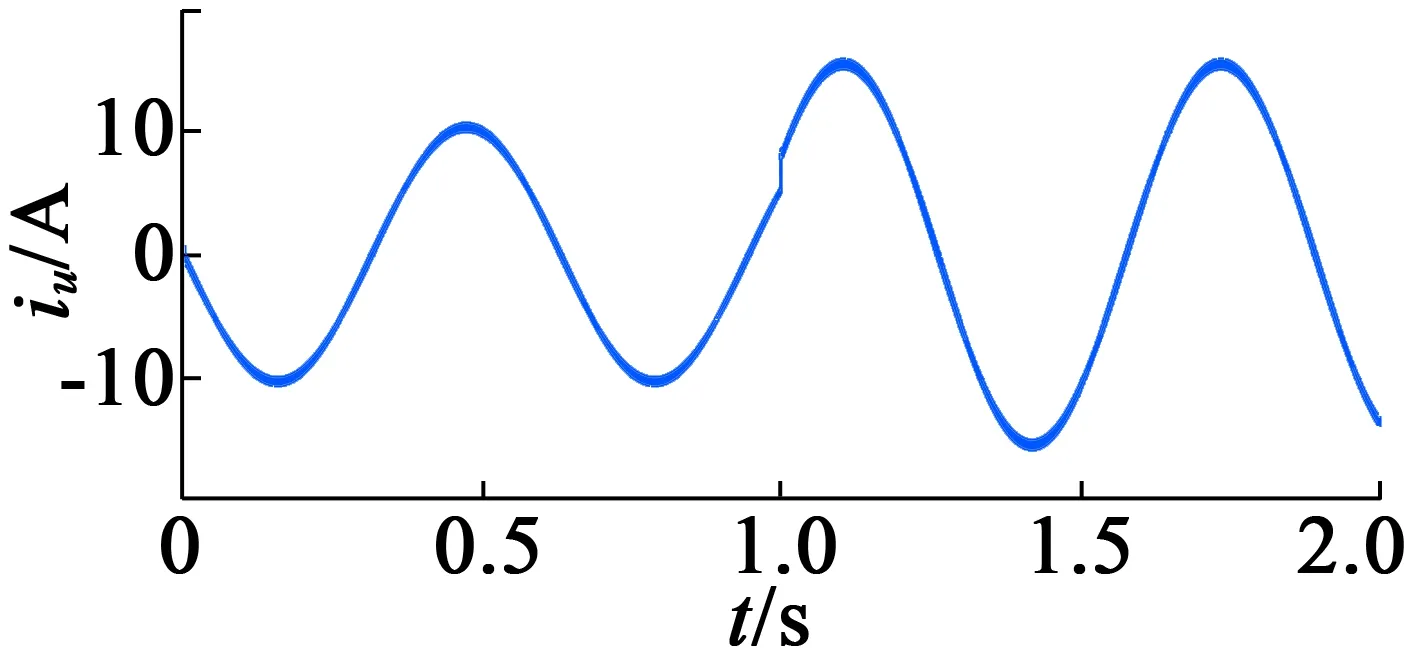
图12 U相电流波形
6 实验结果
对上述控制方案进行实物验证。主电路采用三相全桥电路,主控芯片采用TMS320X2812的DSP芯片,EP1K30QC208-3N的CPLD芯片进行信号检测和PWM波形生成。对一台功率为5.5 kW,额定转速为1 500 r/min的12/10 DC偏置磁阻电机(直流绕组通入恒定电流)进行矢量控制,使其运行在低速情况下。

(a) 实验样机

(b) 控制电路
转矩电流波形如图14所示。当交流电流为1 A,直流电流为1 A时,电机平均转矩达到1.25 N·m且转矩波动不大。实验证明,该控制方式能够节省开关器件,并且能有效降低系统转矩脉动。
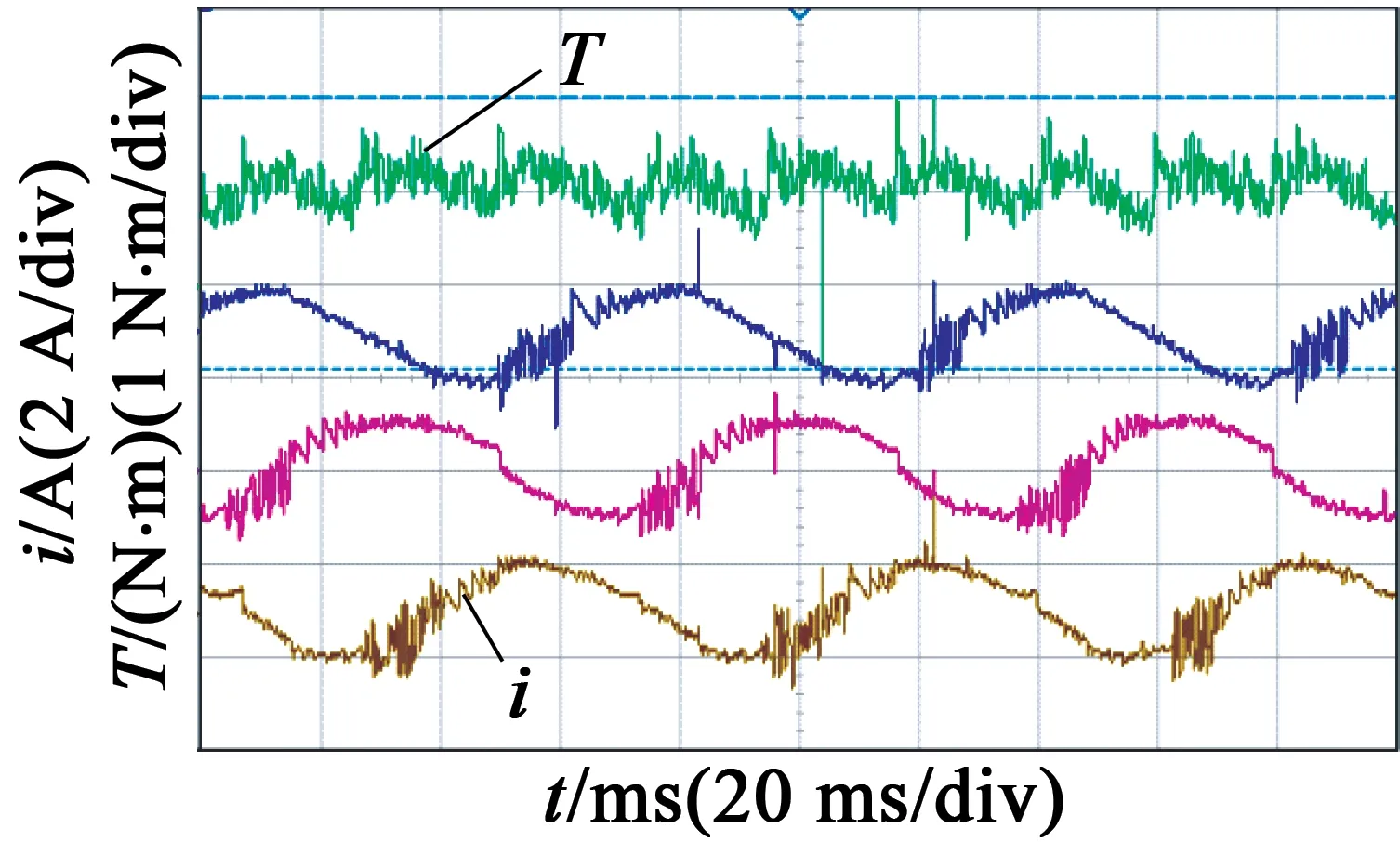
图14 转矩和电流波形
7 结 语
本文叙述了传统磁阻电机与DC偏置的磁阻电机之间的区别,通过将电感波形互错180°的两相绕组反向串联,将原来六相绕组合并成为三相。这样就可以使用三相全桥电路作为主电路,节省了开关器件。分析了电机的状态方程,以此建立了Simulink模型,并搭建了电机的矢量控制系统。通过实验证明,应用此矢量控制系统能够减少开关器件的使用,降低成本,获得较好的转矩特性。
猜你喜欢
大电机技术(2022年5期)2022-11-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年1期)2022-02-16
防爆电机(2021年6期)2022-01-17
防爆电机(2021年6期)2022-01-17
防爆电机(2021年4期)2021-07-28
防爆电机(2021年4期)2021-07-28
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
防爆电机(2020年3期)2020-11-06
