
PMSM四象限驱动系统的自适应滑模和反步控制
2019-07-02 07:17吕广临于海生刘旭东于金鹏吴贺荣
微特电机 2019年6期
吕广临,于海生,刘旭东,于金鹏,吴贺荣
(青岛大学,青岛 266071)
0 引 言
目前,交流电机驱动系统得到国内外学者深入研究[1-3]。然而,传统的永磁同步电机(以下简称PMSM)驱动系统中,网侧变流器采用二极管或晶闸管等器件,难以实现直流母线电压稳定可控、电机四象限运行、电机转速稳定跟踪等目标。近年来,以绝缘栅双极晶体管为主体的背靠背交流器成功克服了这些缺点[4-6]。
文献[7]提出基于直接矩阵变流器的PMSM四象限驱动系统,降低了传统磁场定向控制(FOC)成本,实现了电机的四象限运行;文献[8]提出基于AC/DC/AC变流器的鲁棒控制,网侧设计电流环实现功率因数接近于1,设计电压环控制母线电压,机侧采用反步控制实现对电机转速跟踪,但在机侧负载有变化时直流母线电压波动较大;文献[9]提出网侧采用模型参考自适应控制,机侧采用基于模型参考的模糊自适应控制,但母线电压超调过大。
滑模控制具有较强的鲁棒性,文献[10]针对系统建模时未考虑成分,改进了指数趋近律,同时引入自适应控制,通过加入自适应项,实现系统状态到滑模面距离的自适应调节。反步法简化了控制器的计算,易于实现系统的全局渐进稳定[11]。
本文结合滑模控制、自适应控制和反步法的优点,设计了一种基于背靠背变流器的自适应滑模控制和反步法相结合的控制策略,实现直流母线电压可控、无超调,电机转速稳定跟踪。同时,将本文设计方案与网侧电压定向控制、机侧磁场定向控制进行比较研究。
1 系统的整体设计方案
系统控制原理如图1所示,由网侧子系统和机侧子系统两部分组成,两子系统通过中间储能电容相连。网侧子系统由电网、电抗器、电阻及网侧变流器组成,PMSM及机侧变流器构成机侧子系统。

图1 系统的控制原理图
2 PMSM四象限驱动系统数学模型
2.1 网侧子系统数学模型
网侧交流器在d,q同步旋转坐标系下的数学模型:
(1)
2.2 机侧子系统数学模型
对于机侧子系统,主要针对电机模型。PMSM在d,q同步旋转坐标系下的数学模型[11]:
(2)
T=p[(Ld-Lq)imdimq+Φimq]
(3)
式中:Ld和Lq为d,q轴上的定子电感;Rs为定子电阻;ωm为转子机械角速度;p为极对数;Φ为永磁体产生的磁链;T为电磁转矩;TL为负载转矩;Jm为转动惯量。
3 PMSM四象限驱动系统控制器设计
3.1 网侧子系统控制器设计
网侧控制目标:直流母线电压udc快速达到参考值Vdc且保持恒定;提高网侧功率因数,使其接近1。
3.1.1 自适应滑模控制器的设计
定义直流母线电压误差:
eg0=Vdc-udc
(4)
式中:Vdc为电压参考值。
在母线电压调节初始时,Vdc较大,而udc为零,这造成母线定义的电压误差过大,母线电压易产生超调。为解决电压超调问题,采用软给定的方式对Vdc进行设定:
Vdc=Vdcm(1-e-t/T)
(5)
式中:Vdcm为电压稳态值;T为时间常数。
选取滑模面:

(6)
选取指数滑模趋近律:
(7)
式中:βg>0;m>1;0
那么由式(1)、式(4)、式(6)和式(7)可得:
(8)
3.1.2 反步控制器的设计

(9)

kg1>0
(10)

kg2>0
(11)

因此,网侧子系统渐近稳定。网侧子系统控制器为式(10)、式(11)。
3.2 机侧子系统控制器设计

3.2.1 负载转矩观测器设计
设计负载观测器[12]:
(12)

3.2.2 自适应滑模控制器的设计
定义转速误差:
(13)
选取滑模面:
(14)
选取指数滑模趋近律:
(15)
联立式(2)和式(13)~式(15),得:
(16)
对于隐极式PMSM(Ld=Lq),有:
(17)
3.2.3 反步控制器的设计

(18)
(19)

(20)

因此,机侧子系统渐近稳定。机侧子系统控制器为式(19)、式(20)。
4 仿真结果
用MATLAB对该系统进行仿真分析。网侧参数如表1所示,机侧参数如表2所示。

表1 网侧仿真参数
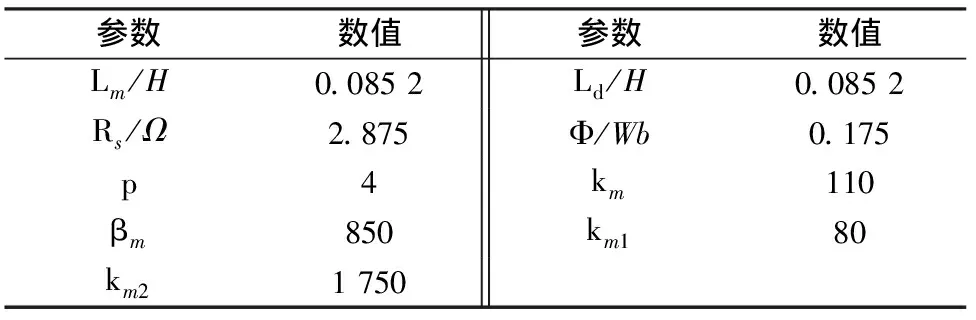
表2 机侧仿真参数

网侧直流母线电压曲线如图2、图3所示。对比图2、图3,加入软给定后,直流母线电压无超调。同时,将本文设计方案与电压定向控制作对比,在图3中可看出,采用自适应滑模和反步法的控制策略其母线电压可以更快达到预设值,在负载转矩有变化时,本文设计方案下母线电压更加稳定。
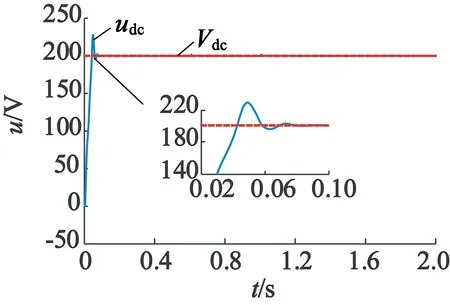
图2 不加软给定时直流母线电压变化曲线

图3 加入软给定后直流母线电压变化曲线
电网侧d,q轴电流如图4所示,机侧角速度如图5所示,电磁转矩曲线如图6所示。从图4看出,在系统运行过程中,igq始终接近为零,提高了网侧功率因数,使其接近为1。从图5看出,电机角速度快速到达设定值,跟踪性能良好;同时与磁场定向控制对比,本设计方案跟踪性能更加优越。由图5、图6看出,在0.2~0.4s,T-TL>0,ωm>0,电机在第一象限运行;在0.6~0.8s,T-TL<0,ωm>0,电机运行在第二象限;同理,可分析电机在第三、四象限运行的情形。

图4 电网侧d,q轴电流
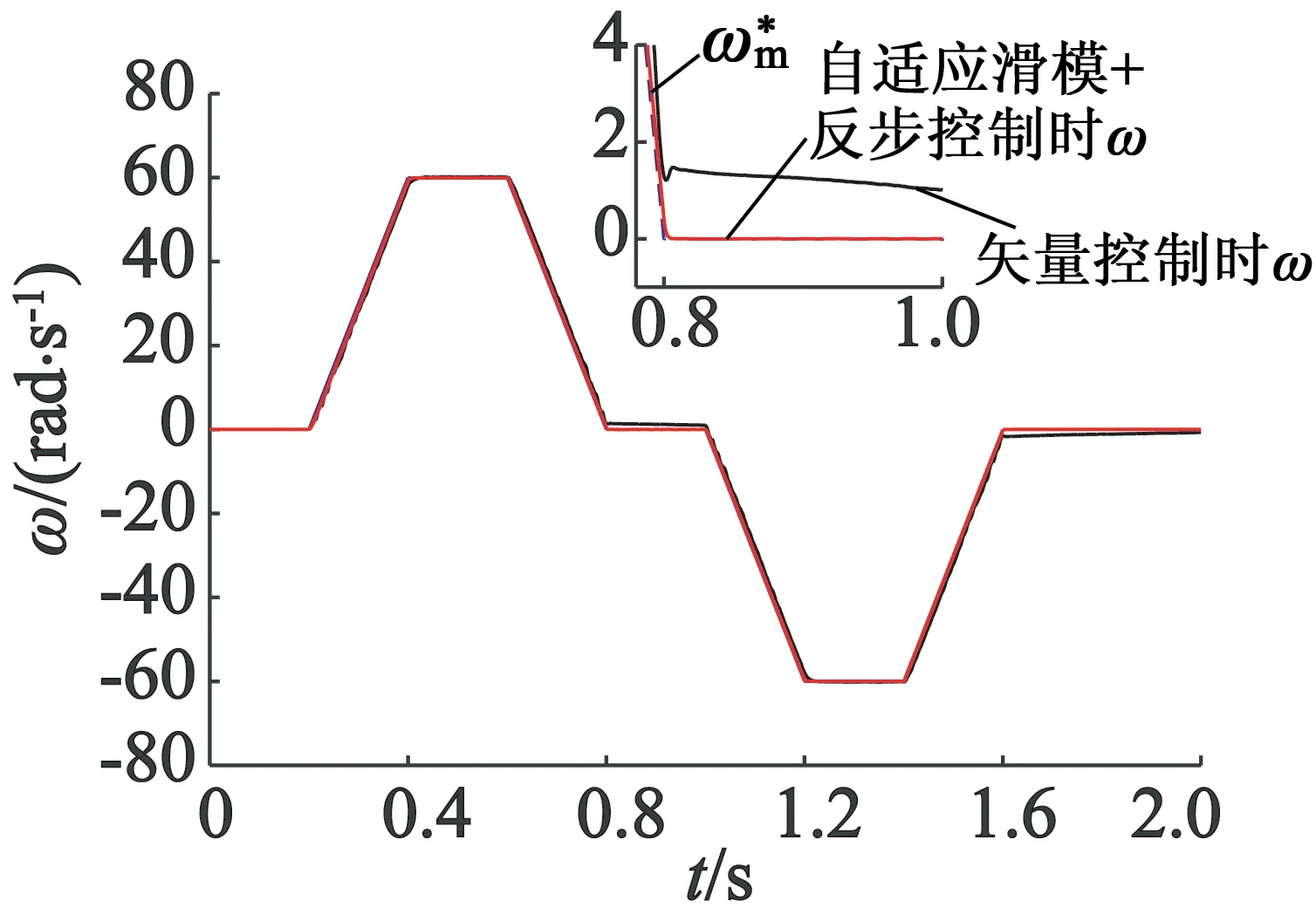
图5 机侧角速度曲线
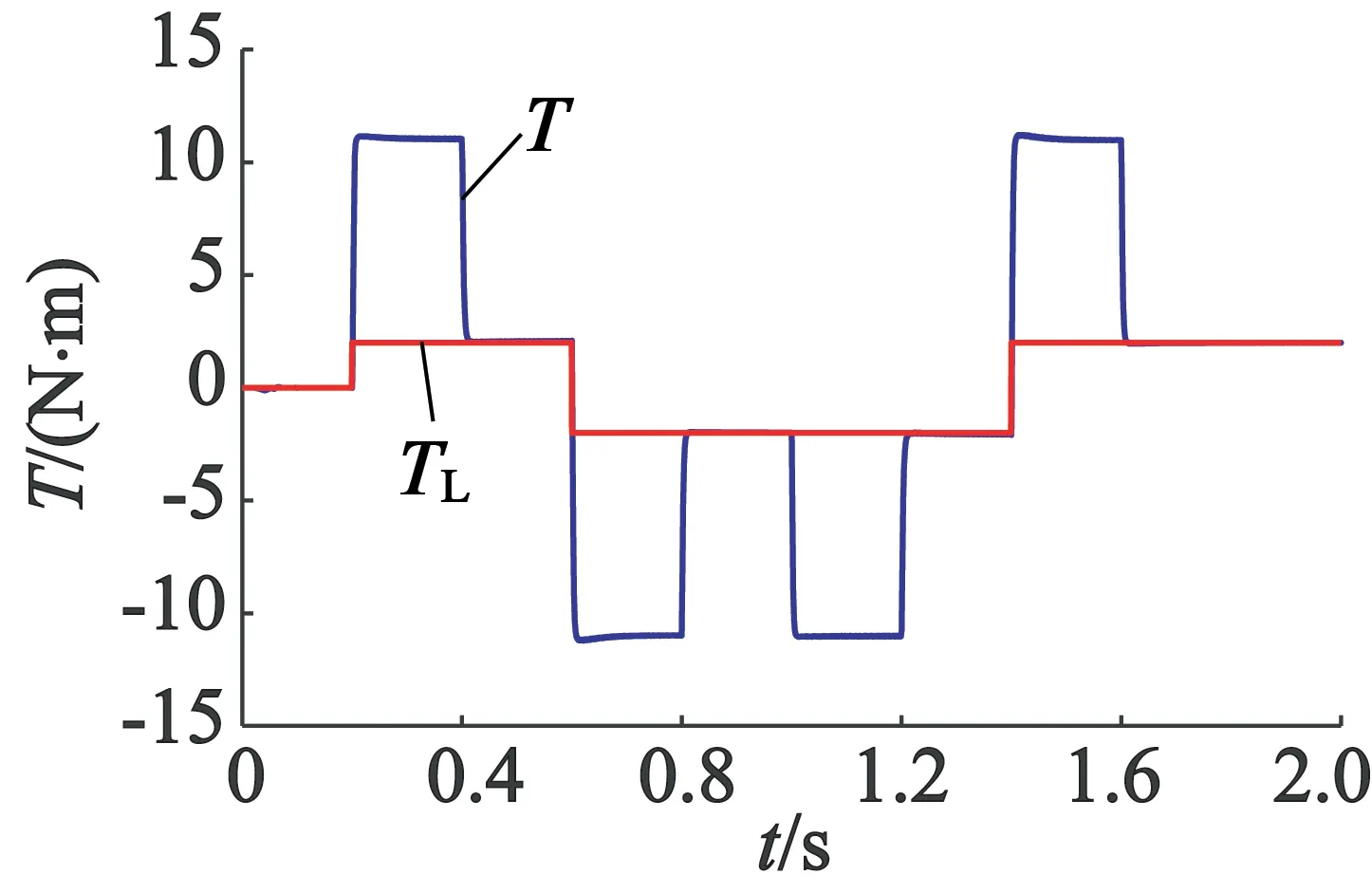
图6 机侧电磁转矩与负载转矩曲线
负载转矩观测器估计值及实际值如图7所示。设计的负载观测器能对实际负载转矩实时估计,保证了观测器的实时性、准确性。

图7 负载转矩观测器估计值及实际值曲线
5 结 语
本文研究了基于背靠背变流器的PMSM四象限驱动系统的自适应滑模和反步控制。网侧在此基础上通过改进电压参考值的设定方法,解决了母线电压超调问题,机侧设计了负载转矩观测器,优化了对电机转速的跟踪效果。在仿真分析中,同时与网侧电压定向控制和机侧磁场定向控制作了对比研究,仿真结果表明,本文设计方案解决了电压超调,电机转速效果更优。
猜你喜欢
河北农机(2021年12期)2022-01-06
科学技术创新(2021年21期)2021-07-30
铁道机车车辆(2021年3期)2021-07-12
科技信息·学术版(2021年7期)2021-01-10
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
煤矿机电(2020年5期)2020-11-02
航空发动机(2020年3期)2020-07-24
电子制作(2019年10期)2019-06-17
课程教育研究·学法教法研究(2018年20期)2018-08-11
