
二电平和三电平网侧变流器控制及谐波比较*
2021-07-12 13:23宋术全
铁道机车车辆 2021年3期
宋术全
(1 中国铁道科学研究院集团有限公司 机车车辆研究所,北京100081;2 北京纵横机电科技有限公司,北京100094)
在我国铁路牵引领域二电平变流器和三电平变流器均有采用[1],二电平变流器在机车和动车组上均有应用,而三电平变流器则主要应用于动车组上。以CRH动车组为例,采用三电平变流器的有CRH2型系列动车组和CRH3A动车组,其中CRH3A动车组网侧变流器为三电平,而逆变器仍为二电平,就变流器的构成而言,相比于二电平变流器,三电平变流器主电路的结构自然比较复杂,但是也具备一定的优点[2-3]:首先,单个开关器件所承受的电压低,在相同中间直流环节电压下只有二电平变流器的一半,因此相同的开关器件可以应用于更高电压、更大容量变流器;其次,三电平变流器的单个桥臂有4个开关器件,通过不同器件的导通和关断可以获得4种开关状态,桥臂的输出可以有3种输出电压等级,因此在相同的开关频率下三电平变流器输出的电压波形更接近正弦,从单个变流器角度看其电流谐波会优于二电平变流器。
将基于坐标旋转变换的空间矢量解耦控制算法用于网侧变流器的控制,该控制方法在控制原理上可适用于二电平和三电平网侧变流器,两者之间的主要区别在于脉宽调制环节。采用文中的矢量解耦控制算法对二电平和三电平网侧变流器分别进行仿真计算,对两者的谐波情况进行了比较,指出两者的区别以及不同的应用范围。
1 网侧变流器及控制
二电平网侧变流器主回路原理图如图1所示,其中Un为折算至变压器输出侧的电源电压;in为变压器输出电流;Ln和Rn则为折合到变压器二次侧绕组漏感和电阻;us为网侧变流器的输入电压;Cd为变流器中间直流环节支撑电容。三电平网侧变流器主回路原理图如图2所示,与图1中二电平网侧变流器的主要区别在于变流器采用了Nabae提出的中点钳位方案[4-5]。无论是二电平还是三电平网侧变流器,如果在交流输入侧只考虑调制波电压us的基波矢量S1,那么两者交流侧主电路均可以等效的电路图如图3所示。

图1 二电平网侧变流器主回路原理图

图2 三电平网侧变流器主回路原理图
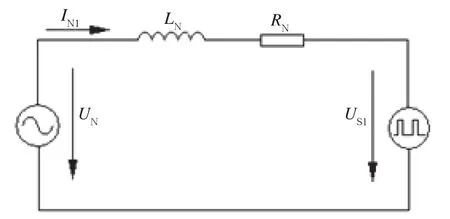
图3 交流电源侧等效电路图
为了方便对网侧变流器进行分析,采用基于坐标旋转变换的矢量思想进行模型建立[6-8]。
通常单相系统网压表示为式(1):

式中:Up为网压幅值;ω为电压角频率;ϕu为网压初始相角。
通过构造网压的正交分量,可将式(1)表示为旋转坐标系α-β下的矢量为式(2):

同理可以得到网流在旋转坐标系α-β下的矢量为式(3):

式中:Ip为网流幅值;ω为电流角频率;ϕi为网流初始相角。
针对图3网侧变流器的电源侧等效电路,根据基尔霍夫电压定律有式(4):

将式(2)、式(3)代入式(4)中可得式(5):




当以网压向量作为D-Q坐标系的参考基准时ϕ=ϕu,同时将式(7)、式(8)和式(9)代入至式(6),整理后可得式(10)、式(11):
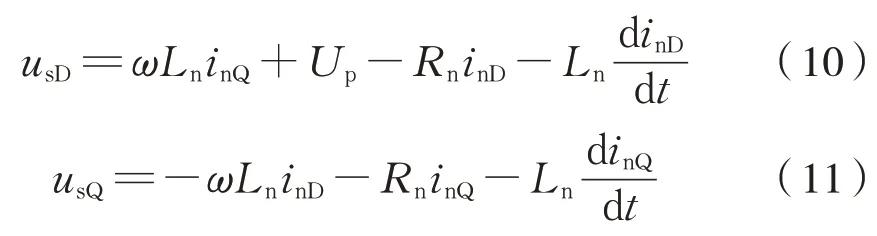
变压器绕组内阻通常较小,如果忽略其影响,那么从式(10)可以看出,在系统进入稳定状态时输入电流in的q轴分量inQ主要受usD的控制,即usD对网侧电流的无功分量影响较大;而根据式(11)可见,输入电流in的D轴分量inD主要受usQ的控制,即usQ对网侧电流的有功分量影响较大。根据式(10)和式(11)得到变流器在静止坐标系D-Q下的输入电压向量后,将其乘以ej(ωt+ϕ)进行反变换,即可得到在旋转坐标系α-β下的对应向量,其实部即为控制所需要的与三角载波进行比较即可得到开关器件动作所需的脉宽调制信号。基于坐标旋转的网侧变流器矢量控制原理如图4所示。

图4 基于坐标旋转的矢量控制原理
2 脉宽调制方法比较
无论是二电平还是三电平整流桥,SPWM是较为常用的脉宽调制方法,在这里针对两者之间的差别进行说明,二电平变流器脉宽调制波形如图5所示,是最常见的调制方法,其中三角载波频率与开关器件的开关频率相同,通过与调制波(控制电压us*)比较得到2个桥臂的开关信号,最终在变流器输入端形成控制所需要的电压信号。
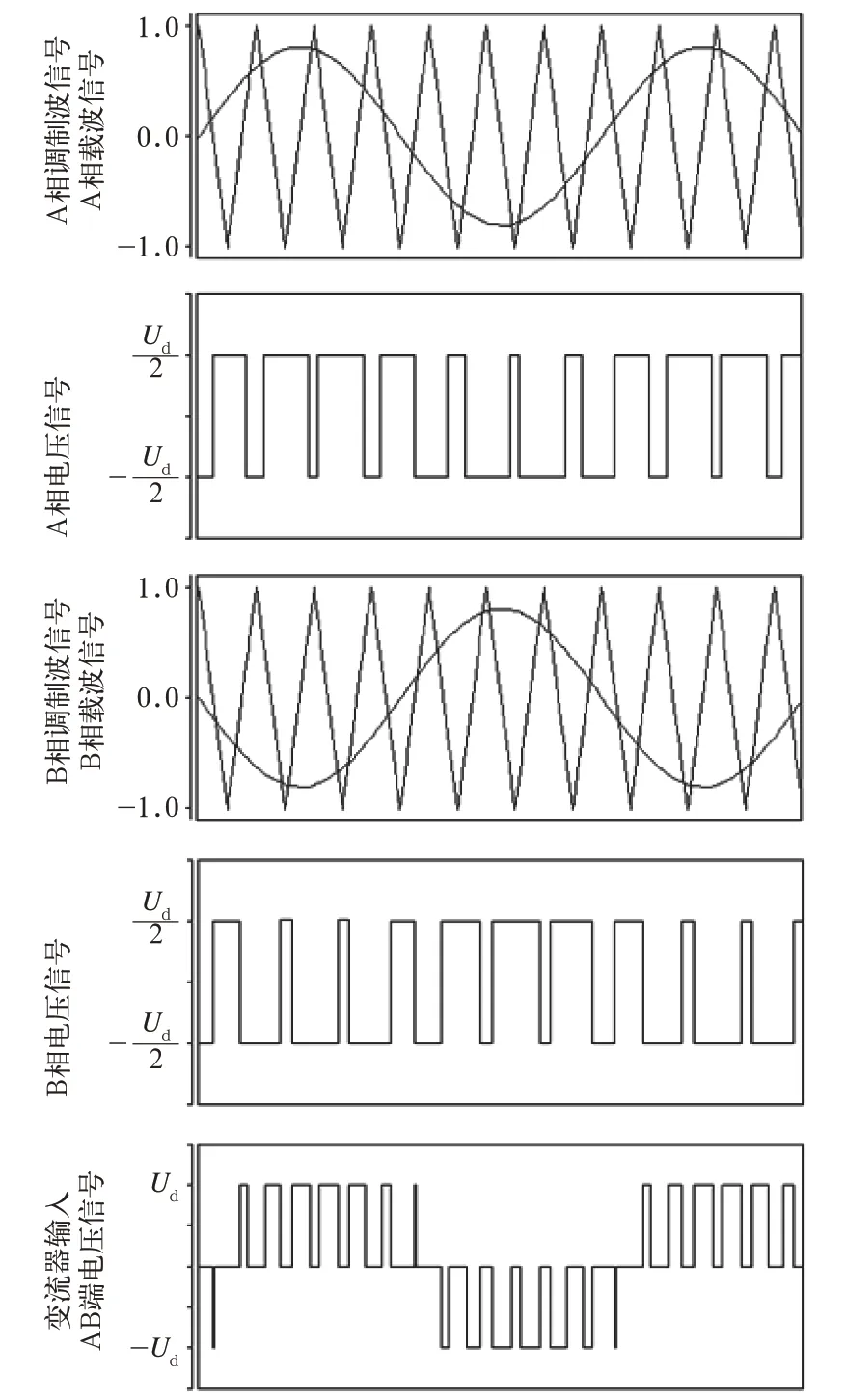
图5 二电平脉宽调制原理
三电平变流器脉宽调制波形如图6所示,其与二电平变流器的主要区别在于载波,由于三电平开关器件比二电平多一倍,通常采用正负半周2个载波的调制方式,因此对应调制信号的正负半周仅有1个桥臂的上半部分或下半部分动作,导致同样器件开关频率对应的载波频率要高一倍。另外为了保证三电平减少谐波含量的效果,2个桥臂之间的载波相位相差180°。

图6 三电平脉宽调制原理
3 仿真结果及比较
3.1 仿真系统概述
为了对2种网侧变流器进行比较,文中仿真时对二电平变流器采用两相两重方式进行仿真,而三电平则只采用1个整流器。二电平仿真系统主回路如图7所示,三电平仿真系统主回路如图8所示。2种系统的控制策略均采用文中的空间矢量解耦控制算法,调制方法则利用上节介绍的二电平和三电平脉宽调制原理。二电平系统和三电平系统的仿真用绕组电压、直流环节电压、系统功率和器件开关频率相同,而三电平系统由于只有1个绕组输入,相当于二电平系统2个绕组并联,因此其绕组漏感和内阻等效为二电平绕组相应参数的一半,见表1。
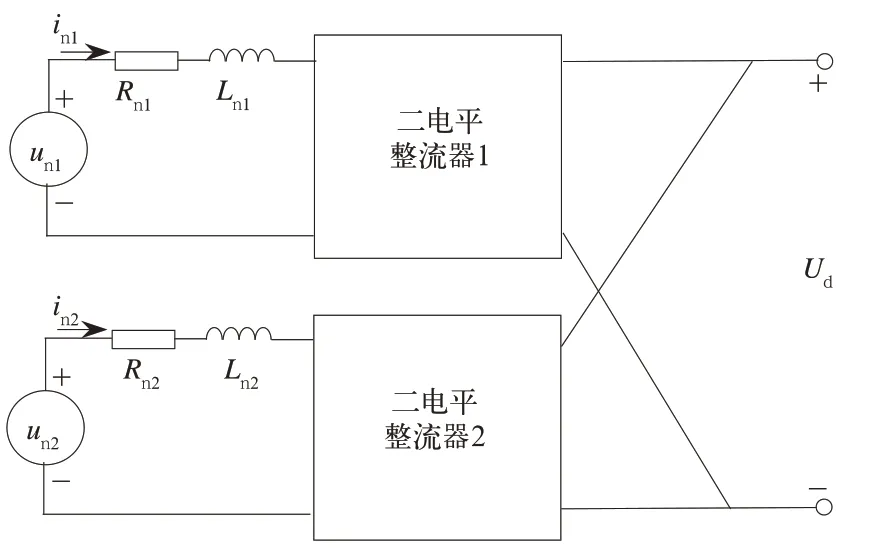
图7 二电平仿真系统主回路

图8 三电平仿真系统主回路
3.2 仿真时的边界条件
二电平和三电平仿真系统中网侧电源均采用理想的电压源来模拟;而其中二电平变流器由于采用两相两重方式,2个变流器之间载波移相角度为90°,此时在网侧形成的等效谐波电流最小;系统的负载通过在中间支流环节投入电阻模拟;网侧电流按单位功率因数控制;主要外部参数见表1。
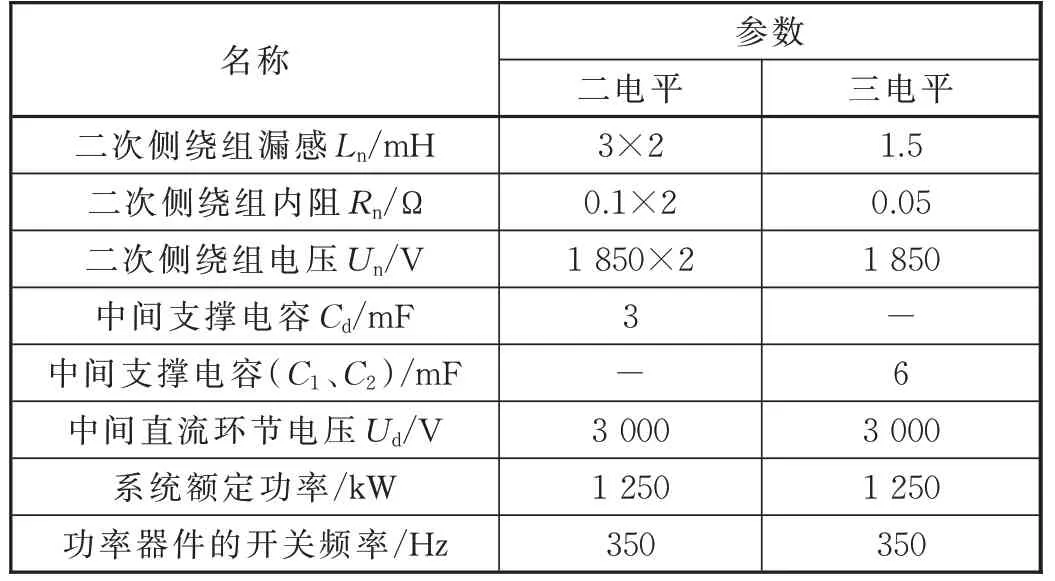
表1 仿真系统的基本参数
3.3 仿真结果
二电平网侧变流器在额定功率时的输入电流波形如图9所示,三电平变流器对应输入电流波形如图10所示,从两图比较可见,就单个变流器而言,相对于二电平变流器,三电平变流器的输入电流更接近正弦波形,电流中的谐波含量较少。二电平变流器2个输入电流相加之后的电流波形如图11所示,从图11中可以看出该电流波形与单个三电平变流器输入电流接近,图12和图13分别针对图11和图10的电流波形进行傅里叶变换,通过两图的比较可以看出两相两重二电平变流器在网侧所形成的谐波与1个三电平变流器是相同的。
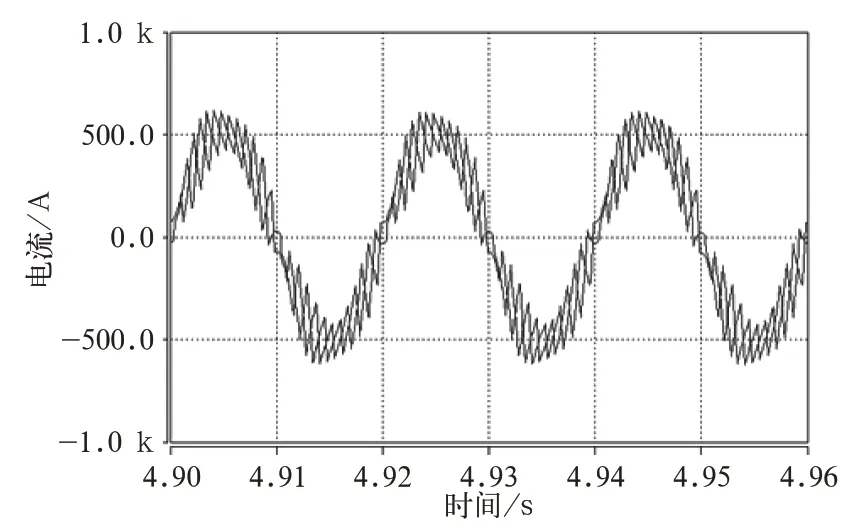
图9 二电平变流器输入电流

图10 三电平变流器输入电流
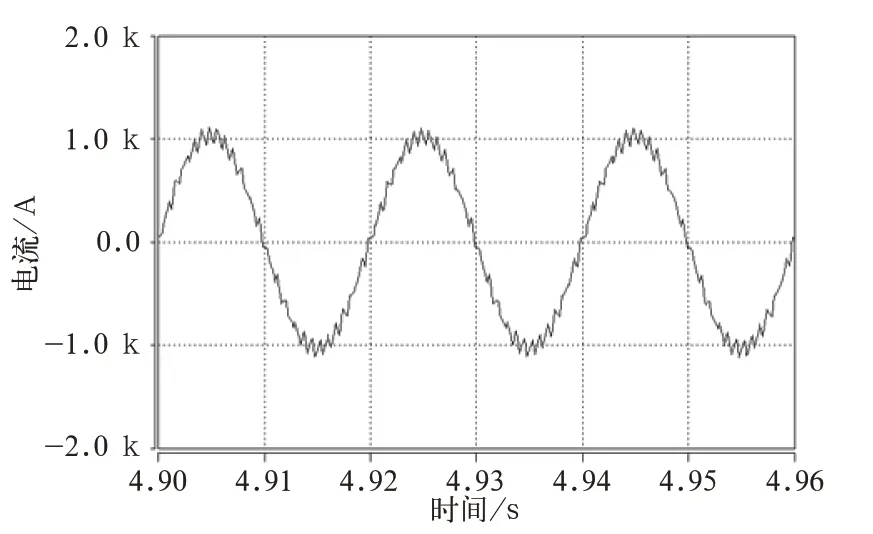
图11 两相两重二电平变流器输入电流之和
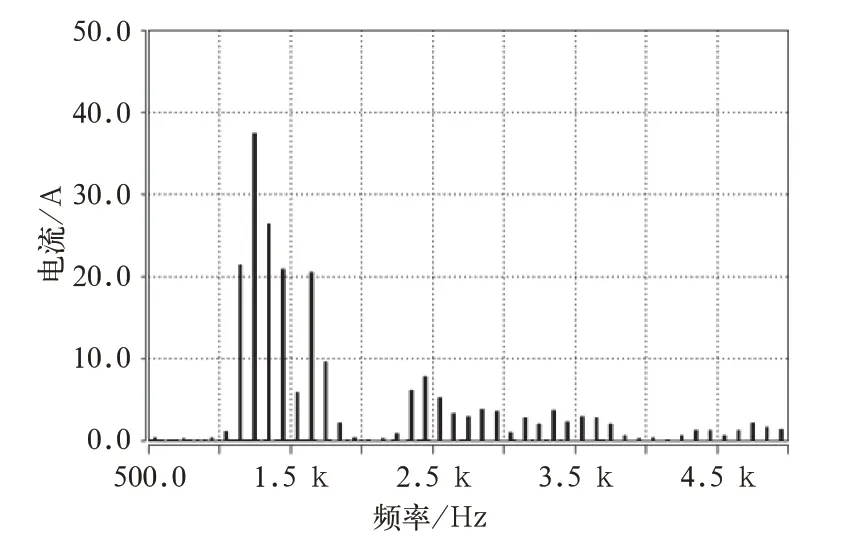
图12 二电平变流器电流谐波分析

图13 三电平变流器电流谐波分析
通过以上波形及分析可以看出,在相同的系统功率和电压等级下,两相两重二电平网侧变流器与1个三电平是等效的,二电平变流器要求开关器件有较高的耐压,但是电流减半,而三电平尽管对器件耐压要求降低,但是电流是二电平变流器的2倍。
4 结论
文中将基于坐标旋转变换的矢量解耦算法应用于二电平和三电平网侧变流器,针对2种变流器采用不同的调制方式分别进行控制。通过仿真分别对二电平系统和三电平系统进行了相同技术参数下的模拟计算,仿真结果表明文中的矢量解耦控制算法可以同时应用于2种变流器,虽然单个二电平整流器在同样条件下相对于三电平的谐波含量较大,但是采用两相两重方式与单个三电平变流器是等效的。因此在电传动系统需要综合考虑电压等级、功率容量以及技术成熟度等因素决定采用二电平或三电平变流器。
猜你喜欢
都市快轨交通(2022年2期)2022-06-28
电气技术(2022年6期)2022-06-27
热力发电(2022年4期)2022-04-30
科学家(2021年24期)2021-04-25
中国空间科学技术(2021年1期)2021-03-16
科学导报·科学工程与电力(2019年5期)2019-10-20
电机与控制学报(2018年9期)2018-05-14
电机与控制学报(2018年9期)2018-05-14
山东工业技术(2018年2期)2018-03-20
移动通信(2017年11期)2017-06-20
