手术机器人的检测方法
2019-07-11 09:37梁晓雄余国瑞黄莉上海市计量测试技术研究院
上海计量测试 2019年3期
梁晓雄 余国瑞 黄莉 / 上海市计量测试技术研究院
0 引言
手术机器人是将传统医疗器械与信息技术、机器人技术相结合的产物,在微创的基础上,将手术的精度和可行性提升到了全新的高度,今后必将成为外科手术的一大主流。相比传统手术,手术机器人有着很多优势和改进。对于手术人员而言,它能增加视野角度,减少手部颤动;改善工作环境,降低术者疲劳;减少参加人员,降低人力成本等。对于患者而言,能使患者术后恢复更快,创伤更小;减少术后疼痛等。随着手术机器人技术的发展和普及,国内一流三甲医院已经不断引入手术机器人开展外科手术,而随之而来的质量控制也急需完善。
1 手术机器人的构成
如图1所示,以市场上最先进的DaVinci手术机器人为例,其主要由医生控制台、成像系统和机械臂系统三大部分组成。
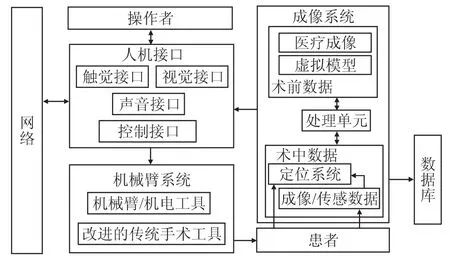
图1 手术机器人结构框图
在手术过程中,主刀医生无需与病人接触,将在位于无菌环境外的医生控制台开展手术。期间,主刀医生可以使用双手操控两个主控制器,用脚踏板来控制器械和高清内窥镜,手部轻微的颤动将会被过滤,从而提高手术实施中的精准性。成像系统可以将主刀医生的手术视野放大十倍以上,有助于清晰地辨认解剖组织结构。而机械臂系统则是手术机器人执行的终端,助手医生需要在无菌环境内协助主刀医生完成手术,一旦遇到意外,助手医生对机械臂有优先控制权,以确保患者的安全。
2 手术机器人的安全隐患
近年来,因为手术机器人自身故障导致的手术意外时有发生。据2015年英国《每日邮报》报道,被运用广泛的DaVinci手术机器人,在手术过程中一个机械手不肯放开它抓住的人体组织,一个机器人的手臂还打了一个躺在手术台上的病人,结果病人在手术不久后就意外去世了。美国食品药品监管局2015年数据显示,仅美国国内,机器人手术中致死的患者就已高达144人,这让人们对手术机器人的安全性产生了担忧和不安。
由于手术机器人是高风险三类医疗设备,其可靠性和安全性尤为重要,且国内大部分医院通常只有一台同类设备无备机可用,一旦出现不可恢复的设备故障,势必会影响手术计划的实施,降低手术的成功率,因此对手术机器人进行检测是非常必要的。
3 手术机器人的检测
笔者查阅了大量的相关文献,发现导致手术机器人发生故障的原因很多,有自身控制系统出错,如机械臂不受医生控制导致的;有自身安全系统,如在手术过程中电源意外断电而电源储备系统发生漏电导致的;有性能指标未达标,如机械臂位移准确度未达到手术要求,使得手术刀误伤人体其他组织导致的等。
本文通过深入分析手术机器人的工作原理、实际操作情况以及医用电气设备相关要求,从计量检测角度,对手术机器人的控制功能、性能参数以及电气安全三个方面进行分析,简要阐明了检测目的、测试内容以及参考方法,望给手术机器人的质量控制人员提供一点参考。
3.1 手术机器人的控制功能检测
控制功能是手术机器人执行操作者指令的有效体现,对控制功能的检测是为了确保手术机器人能被操作者有效操控,不因为其控制失常影响手术的安全和进程。
控制功能检测的内容包括:机械臂控制系统、操作控制系统、开机自检系统、故障报警系统、电源应急响应系统等。
控制系统的检测可以参考手术机器人的产品说明书,根据其应实现的功能,在医生控制台逐一进行测试并观察机械臂的响应、输出功能反馈、指示灯点亮等情况。
3.2 手术机器人的性能参数检测
性能参数是手术机器人运行过程中准确性和有效性的直接体现,对性能参数的检测是为了确保手术机器人各方面性能指标达到出厂标准,使手术能够准确、有效地进行。
性能参数检测的内容包括:高频电刀、内窥镜、机械臂咬合力、机械臂位移范围、机械臂位移准确度、机械臂自由度、图像处理系统、触觉反馈系统、定位系统等。
目前部分参数的检测可以参考已有的规范或标准,如高频电刀可以参考JJF 1217-2009《高频电刀校准规范》,内窥镜可以参考YY/T 1587-2018《医用内窥镜 电子内窥镜》,位移参数可以参考JJF 1305-2011《线位移传感器校准规范》和JJF 1352-2012《角位移传感器校准规范》,图像处理系统可以参考YY/T 0482-2010《医疗成像磁共振设备主要图像质量参数的测定》和YY/T 0741—2018《数字化摄影X射线机专用技术条件》等。
3.3 手术机器人的电气安全检测
电气安全的合格与否是手术机器人安全性的直接体现,对电气安全的检测是为了确保机器接地良好并且不漏电,操作者和患者不因为手术机器人设备被电击。
电气安全的检测内容包括:接地阻抗、漏电流、绝缘电阻、电源存储模块、电源分配系统、电线、光纤等。
医疗器械的电气安全主要分为:通用电气安全和专用电气安全两部分。通用电气安全可以参考GB 9706.1-2007《医用电气设备 第一部分:安全通用要求》、GB 9706.15-2008《医用电气设备 第一部分:安全通用要求1.并列标准:医用电气系统安全要求》和YY 0505-2012《医用电气设备 第1-2部分:安全通用要求并列标准:电磁兼容 要求和实验》等。专用电气安全可以参考GB9706.4-2009《医用电气设备 第2-2部分:高频手术设备安全专用要求》、GB9706.9-2008 《医用电气设备 第2-37部分 医用超声诊断和监护设备安全专用要求》、GB 9706.19-2000《医用电气设备 第2部分 内窥镜设备安全专用要求》等。
4 结语
近年来,国外先进的DaVinci手术机器人不断进入中国市场,截至2018年10月,全球已有4 000多台DaVinci手术机器人投入临床使用,其中中国内地有70多台,中国香港地区有10台。2018年11月上海进博会期间,短短一天,国家卫生健康交易团就签下了超过6 000万美元的DaVinci手术机器人采购意向书。国内北航、哈工大、天津大学、上海交大等高校自主研发的医用机器人也开始崭露头角,短短几年,全国各地共完成了近10万例手术,国内的手术机器人市场潜力巨大。就上海而言,三甲医院使用手术机器人进行外科手术就高达上万例,并呈逐年上升趋势。而随着手术机器人的推广和普及,其安全问题不容忽视,定期的检测是确保其安全和性能的关键,也是手术机器人发展的必经之路。
猜你喜欢
现代仪器与医疗(2022年1期)2022-04-19
商品与质量(2021年43期)2022-01-18
现代仪器与医疗(2021年6期)2022-01-18
现代仪器与医疗(2021年4期)2021-11-05
建材发展导向(2021年12期)2021-07-22
中学生数理化·高一版(2020年6期)2020-12-17
中学生数理化(高中版.高二数学)(2020年6期)2020-12-04
湖北农机化(2020年4期)2020-07-24
消费导刊(2018年10期)2018-08-20
小天使·六年级语数英综合(2017年3期)2017-04-25