
空间引力波探测中的绝对距离测量及通信技术
2019-07-12 07:42刘河山高瑞弘罗子人
中国光学 2019年3期
刘河山,高瑞弘,2,罗子人*,靳 刚,2
(1. 中国科学院 力学研究所 微重力重点实验室,北京 100190;2.中国科学院大学 工程科学学院,北京 100049)
1 引 言
2016年初,美国地基激光干涉引力波天文台(LIGO)地面探测器宣布成功探测到引力波,这一重大的科学发现在全世界掀起了“引力波”的热潮[1-2]。LIGO、VIRGO等地面探测器主要关注kHz附近频段的引力波事件,但由于地面尺寸和振动噪声的限制,地面引力波探测装置很难探测更低频率的引力波信息[3-4]。自上世纪八九十年代起,科学家们就一直尝试着进行空间引力波的探测,进一步下探更低频段的信息,测量频率在0.1 mHz至1Hz之间更为丰富的引力波波源,包括中等质量黑洞并合、超大质量黑洞并合、中等质量比黑洞双星绕转以及大质量比黑洞双星绕转系统。由此可研究星系中心黑洞以及其寄宿星系的生长和演化历史[3-5]。
目前,空间引力波探测比较有代表性的是欧洲的LISA(Laser Interferometer Space Antenna)计划,研究了将近30年[6-7]。LISA技术验证星LISA pathfinder已于2015年12月份成功升空,开启了人类空间引力波探测的序幕[8]。我国在空间引力波探测领域起步较晚,2008年,由中国科学院多个研究所及院外科研单位共同成立了中国科学院空间引力波探测工作组。经过数年的研究与讨论,形成我国自主的空间引力波探测方案。我国目前已提出的空间引力波探测计划包括以中国科学院胡文瑞院士和吴岳良院士作为首席科学家的“太极计划[9-10]”和以中山大学罗俊院士作为首席科学家的 “天琴计划[11]”。太极计划的构想与LISA类似,均以发展日心轨道的等边三角形星组为目标。而天琴计划则以地心轨道的等边三角形星组为目标。二者科学目标不同,但均提出将于2033年前后,发射我国的引力波探测星组。本文以下的讨论中,如无特殊说明均以LISA和太极计划为前提,而天琴计划因自身的特殊性在此不做讨论。
空间引力波探测通常采用激光差分干涉的方法,即将由引力波引起的距离变化信息转换为干涉信号的相位变化信息,从而实现距离的高精度测量。和LIGO等地面干涉仪不同,空间干涉仪中卫星间的相对轨道运动,导致干涉臂长的变化,从而使干涉臂臂长并不相等。激光频率不稳定性噪声是激光干涉仪的一个主要噪声源,其值和激光的频率抖动与干涉臂臂长差成正比[6,12]。干涉仪两臂长差越小,频率变化引起的测距误差就越小。以LISA为例,由三星轨道的设计可知,轨道游离引起的臂长差最大可达ΔL≈105km。因此,只有将光源频率稳定性压制到10-6Hz1/2量级[13-14],才能使得频率噪声低于散粒噪声(以臂长500万公里计算,出射光强为1.2 W,波长为1 064 nm,望远镜尺寸为40 cm,此时散粒噪声约为10-11m/Hz1/2)。目前最佳的Nd∶YAG 固体激光器自由运行时,频率不稳定性约在106Hz1/2水平。为达到LISA 计划的需求,需将激光频率稳定性提高12个量级。
目前,LISA 采用三步法对激光频率不稳定性进行压制[12]:Pound-Drever-Hall(PDH)稳频,锁臂技术(arm-locking),TDI (time delay interferometer)技术。PDH锁频是通过锁相的方法将激光频率跟FP 腔(Fabry-Perot Cavity)的谐振频率进行锁定,锁定后的激光频率稳定性能达到30 Hz1/2量级。锁臂技术利用LISA臂长的稳定性来对激光频率进行锁定。虽然LISA 的干涉仪臂长在持续变化,甚至在1×105km的量级,相对变化量在1%~10%之间,但是LISA臂长的变化有稳定的周期,周期为1年。由轨道变化数据的频谱分析可知,LISA臂长变化主要集中在低频段(10-8Hz),而在LISA敏感频率段0.1 mHz~1 Hz之间,却表现的非常稳定。该技术理论上可将激光频率不稳定性压制到10-4Hz1/2量级。TDI技术为一种数据后处理方法,基本原理是通过对测量数据时间平移后重新组合生成等效的等臂长干涉仪测量数据,以达到频率噪声共模压制目的。LISA 臂长的绝对距离测量精度需达到30 cm,那么第二代TDI 数据类型可将激光频率不稳定性噪声进行压制,使其达到LISA要求。因此,绝对距离测量是实现TDI的关键技术单元之一。但地基的轨道预报、深空测控网一般仅能将轨道预报的精度达到10 km量级,远不能达到TDI所需的测距精度。因此需要卫星间建立额外的绝对距离测量链路。
LISA、太极等三星系统的数据同步及通信要求将另两航天器的测量数据传输至通信主星,再由主星将数据发送给中继卫星,最终传递给地面数据站。因此,卫星间仍需建立通信链路,以完成数据的交互。目前,LISA任务的绝对距离测量和通信已经完成实验室的原理演示,正在进行和干涉系统的整体联调工作[15-17]。但国内尚未有相关的研究报道。
本文以空间引力波任务中(如LISA、太极等)对绝对距离测量及通信的需求为出发点,具体阐述该技术的关键问题,实施方案等。结构安排如下:第2部分简述TDI原理,从而引出对绝对距离测量和通信的要求;第3部分阐述空间引力波任务中绝对距离测量和通信技术的实现方法。
2 TDI简述及需求分析
TDI技术通过对不同航天器的数据进行时间平移,数据上重新构建出新的等臂长干涉,进而通过共模抑制消除激光频率抖动噪声。根据不同的数据构型进行划分,仅第一代TDI(不考虑卫星间的相对运动)就有多种类型[18]。限于篇幅,本文仅讨论经典的Michelson构型用以说明TDI的原理,如图1所示。
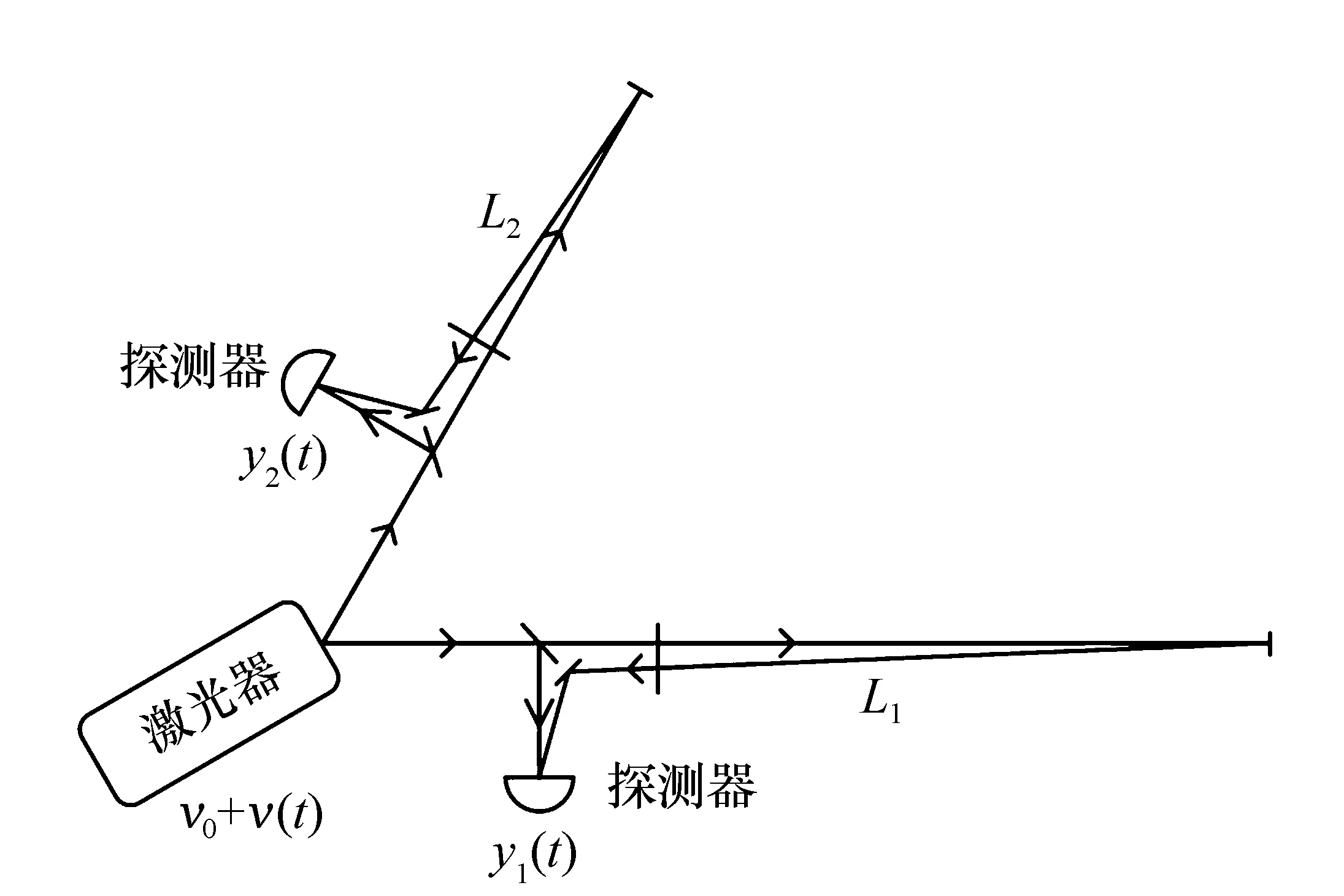
图1 TDI原理图Fig.1 Principle diagram of TDI
图1中,假设激光光源的频率噪声为ν(t)。y1(t),y2(t)为各自干涉臂所探测的信号。那么yi(t)可以写为:
yi(t)=ν(t-2Li)-ν(t)+hi(t) ,
(1)
其中,hi(t)为目标位移波动信息。在这里假设光速c等于单位1。那么,普通的Michelson干涉数据类型为:
y1(t)-y2(t)=ν(t-2L1)+h1(t)-
ν(t-2L2)-h2(t) .
(2)
通过式(2)可以得知,如果干涉臂L1和L2相差过大,ν(t-2L1)-ν(t-2L2)这一部分的激光频率抖动噪声将无法消除,从而淹没待测位移波动信息h1(t)-h2(t)。
TDI数据类型的构造分别将不同干涉臂的数据作时间延迟,构造新的数据类型如式(3):
y1(t-2L2)-y2(t-2L1)=ν(t-2L1-2L2)-ν(t-2L2)+h1(t-2L2)-ν(t-2L2-2L1)+
ν(t-2L1)-h2(t-2L1)=ν(t-2L1)-h2(t-2L1)-ν(t-2L2)+h1(t-2L2) ,
(3)
那么,
φTDI=y1(t-2L2)-y2(t-2L1)-[y1(t)-y2(t)]=
h1(t-2L2)-h2(t-2L1)+h2(t)-h1(t) .
(4)
因此,延迟后构造新的TDI数据类型,就可以在保留位移波动信息的条件下,从原理上消除激光频率抖动的噪声。需要指出的是,以上TDI数据构型属于第一代数据构型之一。但在空间引力波探测中,式中L1、L2是时刻变化的(航天器间的相对运动),此时第一代数据构型将不再适用。如果要求卫星间距离的测量精度达到30 cm,那么加入变化量的第二代TDI数据构型则能够达到要求。
从以上的讨论可知,要实现TDI的数据构型,首先需要对不同干涉臂的数据进行时间延迟。因此,时间延迟(绝对距离)测量精度直接决定了TDI的精度。另外,本部分仅考虑了单颗卫星的数据延迟。像LISA、太极计划等采用多颗卫星的结构时,就需要对不同卫星间的数据进行时间延迟。多颗卫星数据的时间延迟和数据重组相对较为复杂,不仅牵扯到TDI技术,而且需要多颗卫星的时钟同步、数据通信等。
3 绝对距离测量及通信
空间引力波任务中干涉仪需同时满足干涉测距、星间绝对距离测量和数据通信、时钟噪声传递(本文不做讨论)的需求。为节约载荷数量及尽可能简化系统,需将上述多项功能集成在一个系统内,拟在主干涉通路中,额外调制测距及通信信息。方法和传统扩频通信的直接序列扩展(Direct Sequence Spread Spectrum)相似,其基本原理如图2所示[16]。
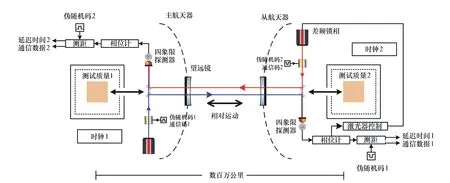
图2 星间绝对距离测量和激光通信原理图Fig.2 Principle diagram of the inter-satellites absolute ranging and laser communication
图2中,通过EOM (Electro-Optic Modulator)调制主激光器,将伪随机码(Gold序列)和通信码(二码异或运算)调制至激光相位中[16,19]。伪随机信号调制频率可选为50 MHz,码片率约为1.5 Mbps(50 MHz/32),此频率选择依据锁相环与延迟环的硬件处理速度。2 048个调制比特用来编码一个通信比特(提高信噪比,降低误码率),因此通信速率约为24.4 kbps。伪随机码信号重复频率可选为几kHz至几百kHz,取决于待测距长度。可根据实际情况依据轨道预报、地面及深空测控网的不确定度决定。含有测距及通信信息的激光,经数百万公里,传输至另一航天器。此时激光的信息如下:

(5)
接收卫星通过干涉仪解调出此伪随机码。此时接收卫星有两种选择,一是将此码通过锁相后,重新发送回传输卫星,传输卫星将返回的伪随机码时间序列与本地存储的伪随机码时间序列进行比对,计算出伪随机码到达的延迟时间;二是接收卫星事先存储了此伪随机码,在解调伪随机码时间序列的同时跟事先存储的伪随机码时间序列进行相关函数计算,从而读出时间延迟。LISA、太极计划目前均采用第二种方案,如图2所示。第二种方案对星间时钟对钟要求较高,若星间对钟偏差为δt,那么乘以光速c,由此带来的测距误差为c·δt。而第一种方案可能会由锁相环处引入额外噪声,从而影响相关函数的计算精度。
含有伪随机码与通信码的激光从远端航天器传输至从激光器,并且与从激光器锁定后,得到干涉信号信息如式(6):
(6)
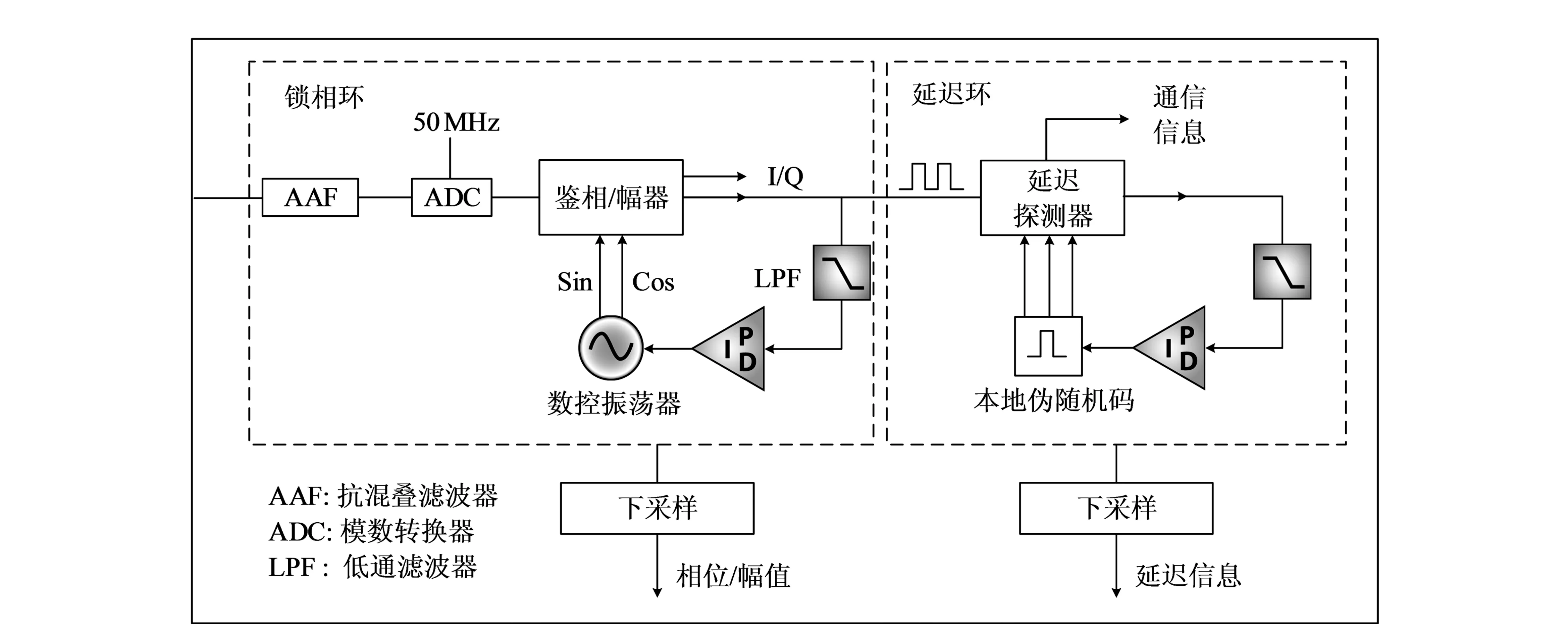
图3 锁相环及延迟锁相环框图Fig.3 Diagram of Phase lock loop and Delay lock loop
(7)
经过上述过程,锁相环将测距及通信信息读出,后通过延迟环将延迟时间D读出。延迟环的延迟计算器本质上负责计算本地伪随机信号与Q分量的互相关函数。EOM调制的伪随机码与本地伪随机码为同一组伪随机信号,并由同一个时钟同时触发。这就避免了由不同时钟触发时引入的时钟对钟问题。延迟环工作模式分成两个部分,一是捕获,二是跟踪。在捕获阶段,延迟环快速大幅度调节本地伪随机噪声的延迟,寻找相关函数值最大时的延迟时间。设本地伪随机噪声信号为N(t),捕获的延迟时间为T。在捕获后,本地伪随机噪声生成器将生成三路伪随机噪声,其中一路为N(t+T),另两路信号分别稍稍超前和延后于N(t+T)。设时间差为Δt,则这两个信号可表示为N(t+T+ΔT)和N(t+T-ΔT)。第一路提供延迟输出T,另两路提供延迟跟踪时的控制信号,用来实时调整延迟时间。捕获完成后,通过解调即可分别得到通信的数据和延迟测距时间T。
通过以上分析可知,空间引力波任务中,在不影响测距精度的条件下,整个系统仅增加EOM和相应调制和解调功能模块(相位计系统组成单元之一)即可完成绝对距离测量和通信功能。
4 结论与展望
空间引力波探测计划,如LISA、太极等,为消除激光频率不稳定噪声,需引入TDI技术。而使用TDI技术时,需要将航天器间的绝对距离测量精度提高到1 m以内。星间测距及通信方案拟采用直接序列扩展的方法。通信码与高速率的伪随机码(扩频码)波形相乘(异或)形成复合码,形成的复合码对激光载波进行相位调制,发送至远端航天器。在远端航天器产生一个和发送端的伪随机码同步的本地参考伪随机码,对接收信号进行相关处理,即可计算出相对于本地伪随机码的时间延迟,从而利用光速乘以延迟时间来计算星间距。可进一步解调出通信信息。
本文所阐述星间绝对距离测量和通信方案不仅适用于LISA、太极等空间引力波任务,而且适用于未来的深空探测任务。随着我国空间技术的发展,特别是嫦娥计划以及载人航天的巨大成功,深空探测如火星探测已提上日程。2016年4月,国家航天局宣布,中国火星探测任务已正式立项,争取在2020年发射探测和着陆巡视的火星探测器,一步实现绕火及着陆。火星探测项目是继载人航天工程、探月工程之后,又一个重大空间探索项目,也是我国首次开展的地外行星空间环境探测活动。目前火星探测器的测控、通信和对钟等均采用地基深空探测网络来实施。由于现阶段探测器数量不多且对测控精度要求不高,地基深空探测网络尚能满足需求。设想数十年后,我国(或全球)的火星探测器及其他深空卫星的数量或许将像现在的地球卫星的数量一样多,并且卫星测控的要求将可能达到北斗或GPS的精度要求。建立通信中继星(地球轨道一颗、火星轨道一颗)——相当于深空北斗或GPS系统——利用激光为媒介,将火星探测器及其他深空卫星的数据进行回传,同时接收和分发地球发出的测控指令,将成为未来火星计划或其他深空卫星任务在轨服务的必然选择。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
现代装饰(2020年4期)2020-05-20
百科探秘·航空航天(2020年12期)2020-01-22
科学(2020年3期)2020-01-06
劳动保护(2019年3期)2019-05-16
电子制作(2017年7期)2017-06-05
科学大众(中学)(2016年9期)2016-12-29
海峡姐妹(2016年2期)2016-02-27
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
太空探索(2014年1期)2014-07-10
