
无拖曳控制技术研究及在我国空间引力波探测中的应用
2019-07-12 07:42邓剑峰蔡志鸣侍行剑余金培李华旺
中国光学 2019年3期
邓剑峰,蔡志鸣,陈 琨,侍行剑,余金培,李华旺
(中国科学院 微小卫星创新研究院,上海 201203)
1 引 言
随着科学技术的迅猛发展和社会需求的提高,越来越多的空间科学任务得以开展,微重力科学、空间基础物理验证、对地观测和航天器高精度导航等空间实验都要求航天器受到的残余扰动加速度尽可能小[1-2]。例如,空间基础物理研究中的低频引力波探测、等效原理检验、短线程效应和参考系拖曳效应的测量以及高精度地球重力场测量卫星都要求在测量频段内航天器的残余扰动加速度小于10-10m/s2,甚至更低。近地卫星受到的外部干扰主要来自大气阻力、太阳光压、高能宇宙射线以及地磁干扰等,内部扰动主要包括平台的结构振动、平台姿态调节产生的扰动以及航天器各分系统耦合产生的力与力矩,扰动加速度在1×10-5~1×10-3m/s2量级,远达不到空间高精度基础科学实验对航天器稳定度的需求[3-5]。
为满足空间科学任务对航天器稳定性的需求,Lange首次提出了无拖曳卫星的解决方案[6]。无拖曳控制的基本原理是利用放置在航天器内部处于真空腔中的悬浮检验质量(Test Mass,TM)作为惯性参考,当航天器受到外部非保守力扰动时,航天器与检验质量之间会产生相对位移,电容桥或激光束将检测到的位移信号作为输入反馈给无拖曳控制系统,控制微推力器的开关,抵消作用在航天器上的外部扰动力和力矩。无拖曳控制技术首次在美国的“Triad I”实验卫星上得以验证[7],并在引力探针B(Gravity Probe B,GP-B)[8-9]、重力场和海洋环流探测航天器(Gravity field and Ocean Circulation Explorer,GOCE)[10-12]、激光干涉仪空间天线项目(Laser Interferometer Space Antenna,LISA)[13-15]和MICROSCOPE卫星(MICRO-Satellite with drag Control for the Observation of the Equivalence Principle,MICROSCOPE)[16-17]等空间基础科学实验卫星中得到进一步改善和提高。
目前无拖曳控制主要有位移模式和加速度计模式[11]。其中,位移模式无拖曳控制中检验质量做纯自由落体运动,通过控制航天器跟踪检验质量,实现对航天器的无拖曳控制;加速度计模式中检验质量跟踪航天器的运动,并把检验质量的控制加速度直接反馈给无拖曳控制系统,抵消航天器受到的非保守力和力矩。
位移模式无拖曳控制中,由于检验质量位于航天器本体内部,且处于真空腔内,不受大气阻力、太阳光压等外部干扰的影响,又因为检验质量悬浮于电极腔内,与航天器本体不接触,基本实现自由落体运动,成为理想的惯性参考基准。同时,利用航天器与检验质量之间距离的变化作为无拖曳控制系统的输入,控制微推力器的开关抵消航天器所受到的非保守力,以保持航天器-检验质量之间间距不变,实现航天器的无拖曳控制。
加速度计模式下,检验质量受到静电悬浮控制系统施加的控制力,使其跟踪航天器运动。由于加速度计外壳固定在航天器上,加速度计所检测出的加速度大小,能够反映出航天器受到的非保守力引起的扰动加速度大小。因此,无拖曳控制系统根据加速度计的输出信号,提供大小相等方向相反的推力,尽可能地抵消航天器受到的非保守力,从而实现航天器的无拖曳控制。本文以空间引力波探测为背景,以历次成功的无拖曳控制卫星任务为代表,回顾了不同卫星采用的无拖曳控制方案以及国内的研究进展,分析了其特点及存在的问题,总结了无拖曳控制的关键技术,并针对我国空间引力波探测对无拖曳控制技术的需求进行了分析和展望。
2 历次成功无拖曳航天器控制方案
从Lange提出无拖曳航天器解决方案以来,国外已成功发射了多颗无拖曳航天器,且都由美国和欧空局(ESA)完成。因此,详细了解成功的欧美无拖曳航天器控制方案,尤其是ESA最新发射的引力波探测技术验证卫星LISA pathfinder(LPF)任务所采用的无拖曳控制技术方案,可以为我国未来空间引力波探测技术攻关提供有效的借鉴和指导。
2.1 “Triad I”无拖曳控制方案
“Triad I”卫星发射于1972年9月,是美国海军发射的第一颗无拖曳控制实验卫星,主要用来改善卫星导航的性能[7,18]。该卫星携带了一套干扰补偿系统(Disturbance Compensation System,DISCOS),用来进行无拖曳控制实验验证。DISCOS的设计指标是将所有非引力扰动加速度抵消到10-11g的水平。DISCOS中的检验质量是一个直径为22 mm的球体,内置于一个直径为44 mm的空腔中。检验质量是由70/30的黄金-铂金铸成的合金,总重111 g,合金具有高密度和接近于零的磁化率。
卫星无拖曳控制原理如图1所示,主要由惯性传感器,微推力器及无拖曳控制系统组成。整个DISCOS的控制系统如图2所示。检测到的电压信号经转换成加速度反馈给控制系统来控制冷气推力器的开关,从而保证检验质量悬浮在空腔的中心,实现对卫星的无拖曳控制。DISCOS系统采用Lange提出的基于燃料最优原则设计控制算法。
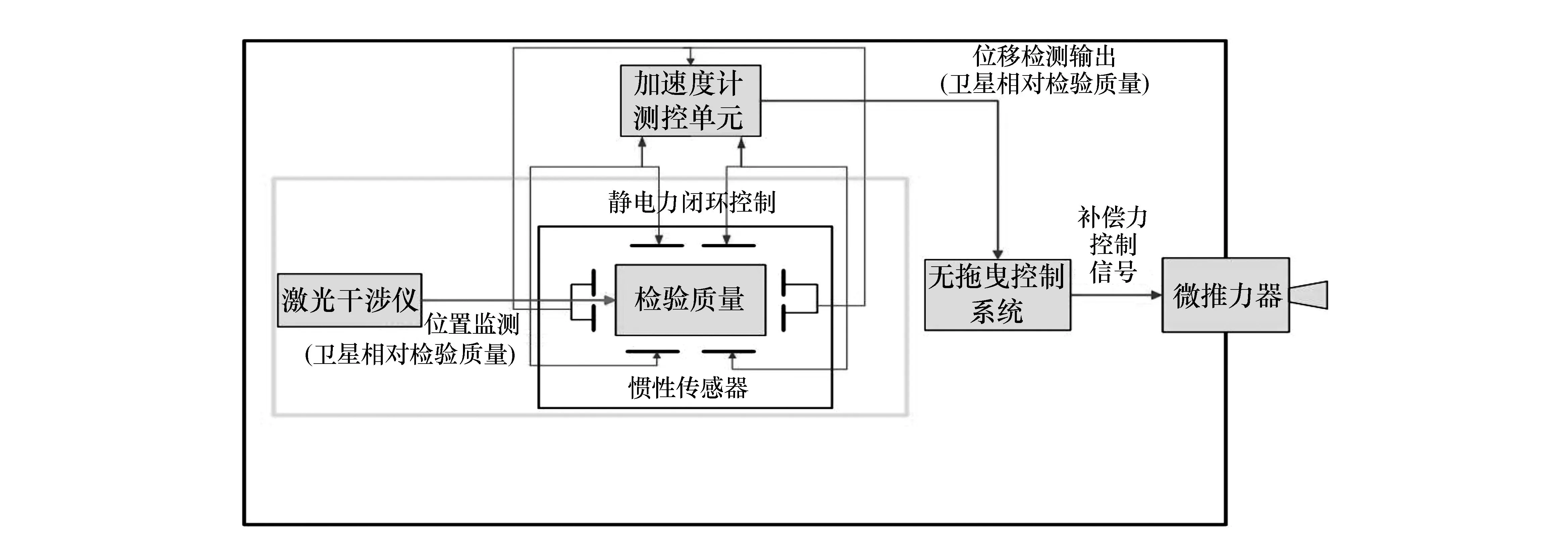
图1 在轨卫星无拖曳控制示意图Fig.1 Schematic of drag-free control of on-orbit satellite
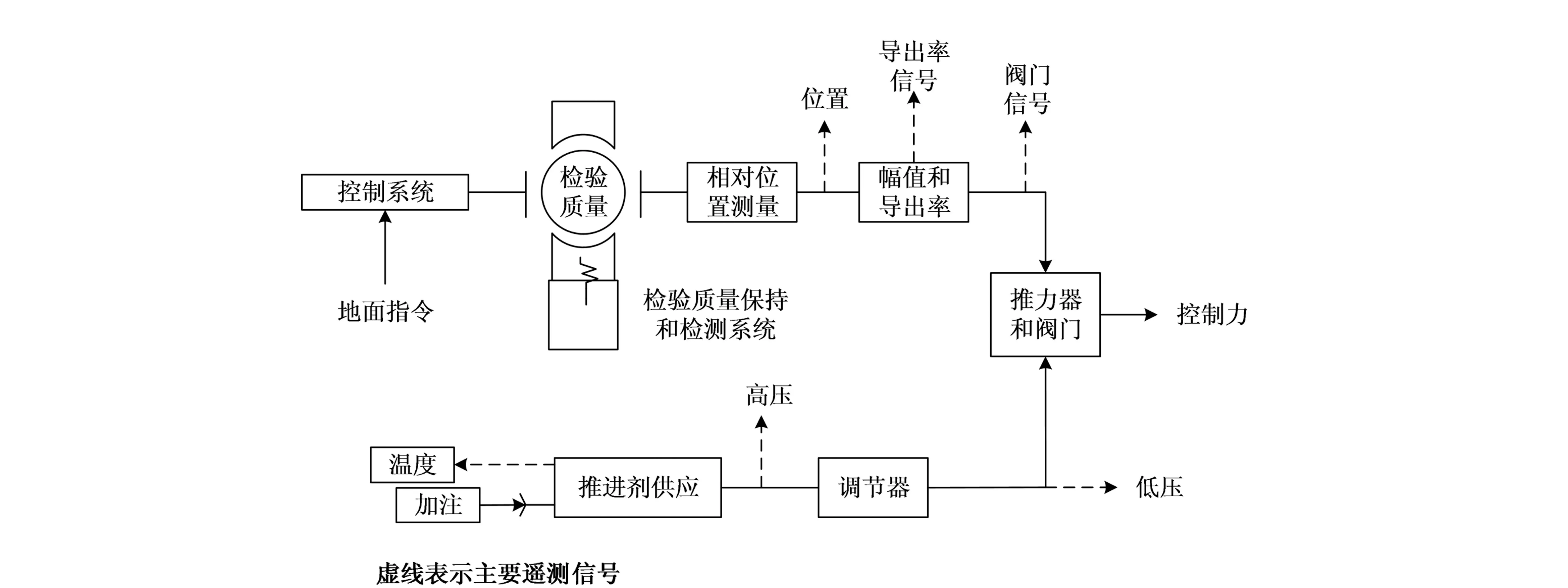
图2 “Trial I” DISCOS控制系统Fig.2 DISCOS control system of “Trial I”
由于“Trial I”是第一代无拖曳控制卫星,其在设计及技术上还存在不少问题,而且卫星携带的检验质量为标准球体,难以考虑其在空腔内的姿态变化;其次,采用电容传感器测量检验质量相对于空腔的相对位置变化,不可避免地给检验质量带来静电力干扰,降低了整个系统的测量精度;采用冷气微推力器作为执行机构,随着气体的释放,卫星的质心会发生变化,这会导致检验质量与卫星之间产生自引力,从而增加了系统建模复杂度。
2.2 “GP-B”无拖曳控制方案
引力探针B卫星(Gravity Probe B,GP-B)发射于2004年4月,主要用来验证爱恩斯坦广义相对论的两个推论[9,19]。通过观察将航天器轨道平面中的一颗遥远恒星作为参考的4个超精密机械陀螺仪自旋轴的进动,来测量广义相对论预测的测地线进动和参考系拖曳效应。为了实现上述科学实验,要求陀螺的随机漂移以及仪器的指向测量精度必须优于1×10-2角秒/年,“GP-B”的设计指标是在一年的实验期间,相对于参考方向的精度为5×10-4角秒。
“GP-B”卫星无拖曳控制系统主要包括内部检验质量、陀螺仪悬架系统、氦气供应系统、比例冷气推力器等,无拖曳控制采用位移模式为主,加速度计模式为备份两种模式。检验质量是直径为38 mm的镀金属石英球体,检验质量与空腔内壁的缝隙为32 μm。检验质量由外壳通道中切向流动的氦气射流驱动,以~75 Hz的频率旋转,可以视为低速旋转的陀螺仪。陀螺仪的自旋轴方向是通过测量转子的伦敦力矩确定的,伦敦力矩是由旋转超导体产生的偶极磁场,其轴与转子的瞬时自旋轴对齐。陀螺仪悬架系统(Gyroscope Suspension System,GSS)的主要功能是:(1)通过静电力将转子悬置在空腔中心,并在科学数据采集期间最小化转子悬架引起的干扰力矩;(2)在气体起旋期间,将检验质量定位并保持在靠近气体旋转通道位置处;(3)将检验质量的位置测量和控制力数据传输到航天器的姿态和平移控制(Attitude and Translation Control,ATC)系统,以实现对航天器无拖曳控制。氦气供应系统为无拖曳控制系统提供冷气推进剂。比例冷气推力器为无拖曳控制系统的执行机构,能够提供最小2.5 mN的推力,推力分辨率小于0.2 mN,推力比例因子变化小于6%,冷气推力噪声为25 μN/Hz1/2。
“GP-B”卫星有位移模式和加速度计模式两种无拖曳控制模式。在位移模式下,参考陀螺仪的悬架系统处于待机模式,检验质量处于自由悬浮状态,通过微推力器控制航天器本体使检验质量悬浮在电极笼的中心,整个控制过程如图3中加粗部分所示。GSS通过接口增益K1将转子的位置信息传递给ATC控制器,控制器由3轴PID组成。由于4个陀螺仪的安装位置偏离航天器质心一段距离,在控制回路中增加重力梯度力矩前馈补偿,抵消重力梯度力矩的影响。位移模式的主要优点是转子是自由落体运动,转子的静电控制回路处于待机状态,原则上最大程度地减小了转子上的干扰力矩。位移模式的不足之处在于:为了避免检验质量与电极笼接触,对检验质量的位移做了限幅,导致只能在相对较窄的带宽内实现无拖曳控制,且当航天器受到外界扰动时,会导致GSS系统频繁开关机;其次,位移模式也不能补偿加速度计的噪声。此外,检验质量和电极笼之间的任何力(例如残余电荷)都将导致转子向电极笼加速移动。反过来,为了将转子保持在电极笼的中心位置,ATC系统需要对航天器施加恒定的加速度,这将使航天器的运行轨道随时间改变。
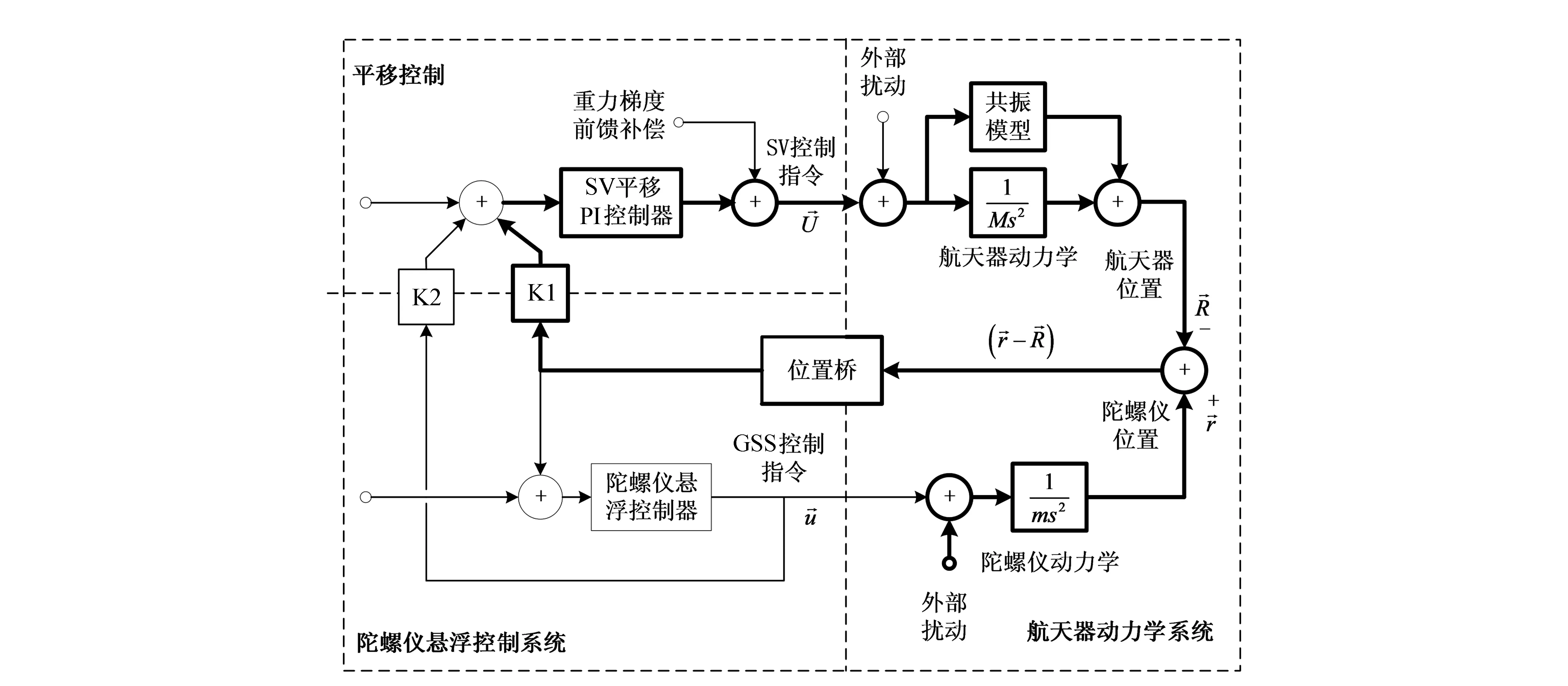
图3 “GP-B”位移模式无拖曳控制系统Fig.3 Drag-free control system with “GP-B” displacement mode

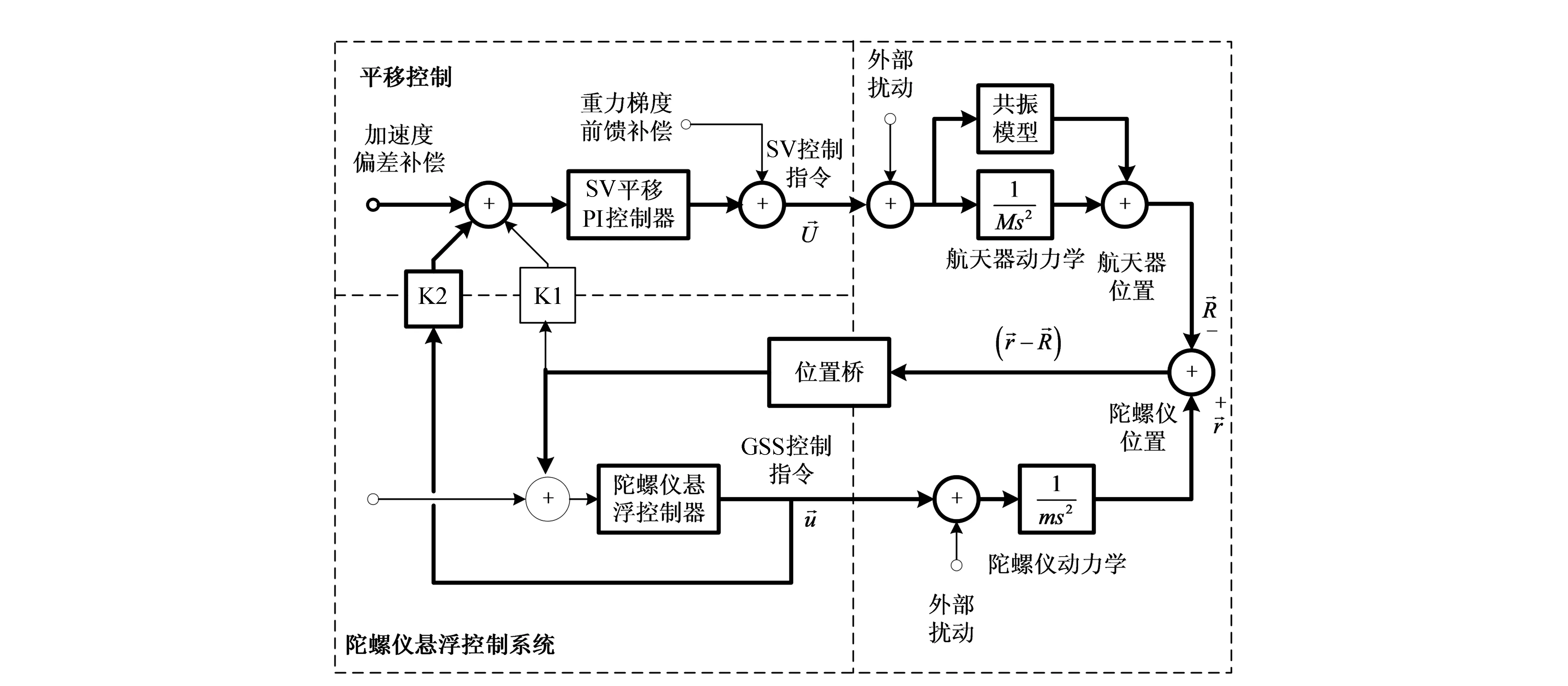
图4 “GP-B” 加速度计模式无拖曳控制系统Fig.4 Drag-free control system with “GP-B” accelerometer mode
2.3 “GOCE”无拖曳控制方案
重力和稳态海洋环流航天器(The Gravity and steady state Ocean Circulation Explorer,GOCE)发射于2009年3月[11]。GOCE的科学目标主要包括两部分:确定地球的稳态重力场异常精度达到1×10-5m/s2;在100公里范围内确定大地水准面空间分辨率在1~2 cm之间。GOCE的有效载荷主要包括一台静电重力梯度仪(Electrostatic Gravity Gradiometer,EGG)和一套基于GPS测量的精确定轨系统(Precise Orbit Determination,POD),POD的测量数据主要用于高精度重构地球重力场的低阶球谐系数,而EGG的测量数据在重构中、高阶球谐系数时性能更好[20-21]。为了获得足够强的重力场信号,GOCE卫星运行在大约260公里的超低轨道, 在该轨道上, 地球大气阻力是主要外部扰动。卫星配备了一套无拖曳与姿态系统 (Drag-Free and Attitude Control System,DFACS), 用来抵消非保守力导致的干扰并维持卫星的运行轨道。此外, 为了达到所需的精度水平, 必须尽量减少所有可能的内部振动部件的扰动,因此,GOCE没有纳入任何机械噪声源, 如动量轮、陀螺仪或其他可展开的部件。
为满足科学观测阶段的精度需求,DFACS的线性加速度噪声不能高于9.0×10-7m/s2,在5~100 mHz的测量频段内噪声频谱密度不能高于2.3×10-8m/s2/Hz1/2。DFACS可以实现4自由度控制:沿飞行方向的无拖曳控制,以及采用磁力矩器进行三轴姿态控制。DFACS的检验质量是一个40 mm×40 mm×10 mm的长方体,主要由铂-铑合金组成。包裹检验质量的电极笼由殷钢组成,电极是钛玻璃陶瓷板。检验质量与电极笼的相对位移测量精度在1 μm量级。DFACS采用离子推进和磁力矩器两种执行机构,磁力矩器主要用于航天器的姿态控制;离子推力器主要用于无拖曳控制及敏感器的标定,用于抵消航天器受到的非保守力及力矩导致的扰动,此外还携带了一套用于重力梯度计校准的内部冗余冷气推进器组件。
GOCE卫星DFACS系统的整个控制过程如图5所示。针对卫星不同的运行阶段,DFAC系统主要有4种工作模式:(1)粗对准模式(Coarse Pointing Mode,CPM),CMP的主要功能是星箭分离后对卫星进行消旋以及实现太阳捕获和指向稳定,既是捕获模式,又是安全模式。(2)拓展粗对准模式(Extended Coarse Pointing Mode,ECPM),ECPM改善了指向精度,允许转换到下一个更高模式,它还允许在应急条件下进行轨道提升机动。(3)精对准模式(Fine Pointing Mode,FPM),这是正常运行模式,可以减少轨道衰减。(4)无拖曳模式(Drag-Free Mode,DFM),DFM是科学数据收集时的运行模式,具有3个子模式:线加速度控制、角加速度控制以及重力梯度仪在轨校正控制模式。
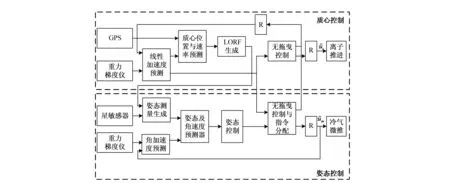
图5 GOCE 卫星无拖曳与姿态控制框图Fig.5 Block diagram of the drag-free and attitude control of GOCE
由于离子推力器的推力范围为0.6~20 mN,推力分辨率为12 μN, 在科学测量通道,每个加速度计可测量沿3个标称正交轴的线性加速度,加速度噪声低于2×10-12m/s2/Hz1/2,无拖曳与姿态控制通道的加速度噪声低于5×10-10m/s2/Hz1/2。受推力器最小推力及推力分辨率的影响,GOCE卫星的DFAC系统并不能满足未来空间引力波探测对加速度噪声的需求。
2.4 “LPF”无拖曳控制方案
LISA Pathfinder(LPF)航天器发射于2015年12月,LPF运行于日地L1点,是ESA空间引力波天文台项目的第一颗实验卫星[13]。主要用于检验质量自由落体的端到端实验,以及激光干涉仪的读出精度,可以满足未来LISA任务对检验质量的精度需求[22]。
LPF携带两个检验质量,作为惯性参考位于激光干涉仪臂的末端,用于反射激光。检验质量为46 mm×46 mm×46 mm的立方体,由高纯度的铂金制成。在科学任务模式期间,两个检验质量在航天器内做自由落体运动,检验质量之间的标称距离是376.0 mm。每个检验质量都置于一个电极笼内,电极笼除了作为检验质量的6自由度传感器和静电力执行器之外,还可用作静电屏蔽,使检验质量处于机械与静电隔离状态,并与电极笼内壁各方向保持2.9~4 mm的间隙。宇宙射线累积到检验质量上的电荷将通过UV光电系统去除。

图6 LPF 无拖曳控制图Fig.6 Block diagram of drag-free control of LPF
LPF的控制系统如图6所示,该系统带有两个检验质量,共12个自由度[14]。由于航天器最多只能提供6个自由度的无拖曳控制,因此需要对检验质量的自由度进行解耦,其他6个自由度通过静电悬浮控制,各自由度定义如图7所示[23]。其中,用于无拖曳控制的六自由度qdrag-free=(x1,y1,z1,θ1,y2,z2)T,用于静电悬浮控制的自由度qsus=(η1,φ1,Δx1,θ2,η2,φ2)T。通过跟踪检验质量TM1的运动实现对航天器的位移模式无拖曳控制。对于检验质量TM2,通过静电力控制使TM2与TM1保持在标称距离,且使其处于电极笼的中心。不同于其他航天器的无拖曳控制方案,LPF携带了两个检验质量,同时对两个检验质量的部分自由度进行无拖曳控制,导致整个动力学系统异常复杂。为满足工程实现,LPF对检验质量动力学系统进行了简化,把无拖曳控制系统简化成由15个单输入单输出(Single Input Single Output,SISO)系统组成的控制回路,并对各回路进行解耦控制,同时为了降低航天器姿态控制对无拖曳控制系统的影响,姿态控制的带宽远低于无拖曳控制的带宽。
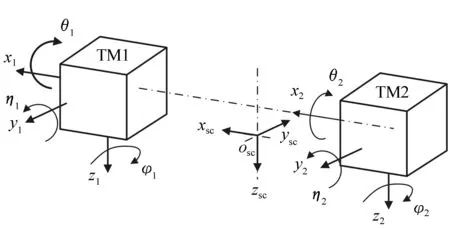
图7 LPF检验质量和航天器坐标系和变量定义Fig.7 Test masses, spacecraft coordinate and variable definition of LPF
LPF在轨实验结果表明,在0.7~20 mHz频率范围内,加速度计的噪声功率谱密度的平方根为(5.2±0.1) fm/s2/Hz1/2,优于LPF的设计指标,是LISA最终指标的1.25倍,并且与由于检验质量周围的残余气体导致的粘性阻尼布朗噪声相兼容。当频率大于60 Hz时,加速度测量噪声主要由激光干涉仪位移读出噪声决定,在(34.8±0.3) fm/s2/Hz1/2范围内,比设计性能指标提高了两个数量级。但是,在低于0.5 mHz时,LPF的在轨测量精度目前还不能满足LISA对低频引力波探测的指标需求,相关技术还需要进一步改进。
国内相关单位和部分高校也正在开展空间引力波探测关键技术的攻关。由中山大学牵头的“天琴”计划,拟在2019年择机发射“天琴1号”实验卫星。该卫星计划在轨验证空间引力波探测的关键技术:高精度惯性传感器技术、高精度激光读出技术、微推力器技术、无拖曳控制以及航天器质心精密控制技术等[24-26]。由于我国空间引力波探测起步较晚,相关技术积累较差,目前仅能对相关关键技术进行可行性验证,要满足未来空间引力波探测的精度需求,还有一系列关键技术有待突破。
3 无拖曳控制关键技术
通过对以往航天器无拖曳控制方案的分析可知,无拖曳控制系统主要包括惯性传感器、微推力器以及无拖曳控制算法3部分。
3.1 惯性传感器系统
惯性传感器系统主要包括检验质量、位移传感器(电容传感或激光干涉)、静电悬浮控制回路等。惯性传感器主要为航天器无拖曳控制系统提供惯性参考,实时反应航天器与检验质量之间的相对位移变化以及非保守力导致的扰动加速度,为无拖曳控制提供输入。
目前检验质量的形状主要有球形、圆柱形和方形,不同形状对应的代表卫星及其优点如表1所示[3,27]。为了降低检验质量引起的热、电、磁噪声,检验质量必须具有超低磁化率和磁力矩,且有良好的导热性。同时,检验质量的加工精度同样会影响测量的准确性及不同自由度之间的耦合刚度。耦合刚度是影响惯性传感器测量精度的主要原因之一,也是影响整个无拖曳控制系统精度的原因,高精度加工工艺与处理技术是保证检验质量表面光滑的关键。

表1 检验质量的分类Tab.1 Classification of test mass
位移传感器目前主要有静电传感、光学传感和超导传感3种方式[28-31],静电传感技术目前最为成熟,广泛应用于航天任务中;光学传感器首次应用在LPF任务,与静电传感器相比,光学传感可以降低航天器与检验质量之间的静电耦合影响,具有更高的测量精度;超导传感由于需要超低温环境,设备复杂,从而增加了其在航天任务中的应用难度。在LPF航天器中,同时采用电容传感和激光读出两种方式测量检验质量与电极笼之间的相对位置变化,这也是未来空间引力波探测无拖曳控制中拟采用的技术。但是,如何精确建立激光功率噪声辐射压力以及静电力带来的加速度噪声模型是提高无拖曳控制精度的关键技术之一。
悬浮控制回路的作用主要有两方面,在加速度模式无拖曳控制中,悬浮控制回路通过静电力控制检验质量跟随航天器运动,并把静电控制加速度反馈给无拖曳控制系统来控制微推力器的开关,抵消航天器受到的非保守力干扰。对于位移模式无拖曳控制,为避免检验质量与电极笼接触,通过静电控制回路对检验质量的位移进行限幅。静电控制回路会带来加速度测量噪声,因此,在空间引力波探测中,必须在光轴方向采用位移模式无拖曳控制。
3.2 微推力器
无拖曳控制的核心执行机构是微推力器,需要产生微牛级别的连续可调推力来抵消航天器平台受到的微小扰动,并且在工作频段内推力噪声必须满足任务需求。目前常用的微推力器主要有冷气微推、离子微推、场发射微推和微胶体推力器[32-34],不同推力器的推力范围及噪声水平如表2所示。

表2 无拖曳控制微推力器 Tab.2 Micro-thruster with drag-free control
由表2可以看出,场发射微推和微胶体推力器可以产生极小的推力,且推力噪声水平极低,非常适合于航天器的无拖曳控制。但是在近地环境中,由于大气阻力、地磁环境以及太阳光压的影响,扰动加速度在低频段1×10-8~1×10-7m/s2/Hz1/2量级,如图8、图9所示。此时需要采用推力较大的离子推力器或冷气微推。但是在远地轨道或深空轨道环境中,航天器受到的扰动主要来自于太阳光压及宇宙射线等,量级很小,适合采用推力噪声极低的场发射推力器和微胶体推力器作为无拖曳控制的执行机构,实现对航天器的无拖曳控制。
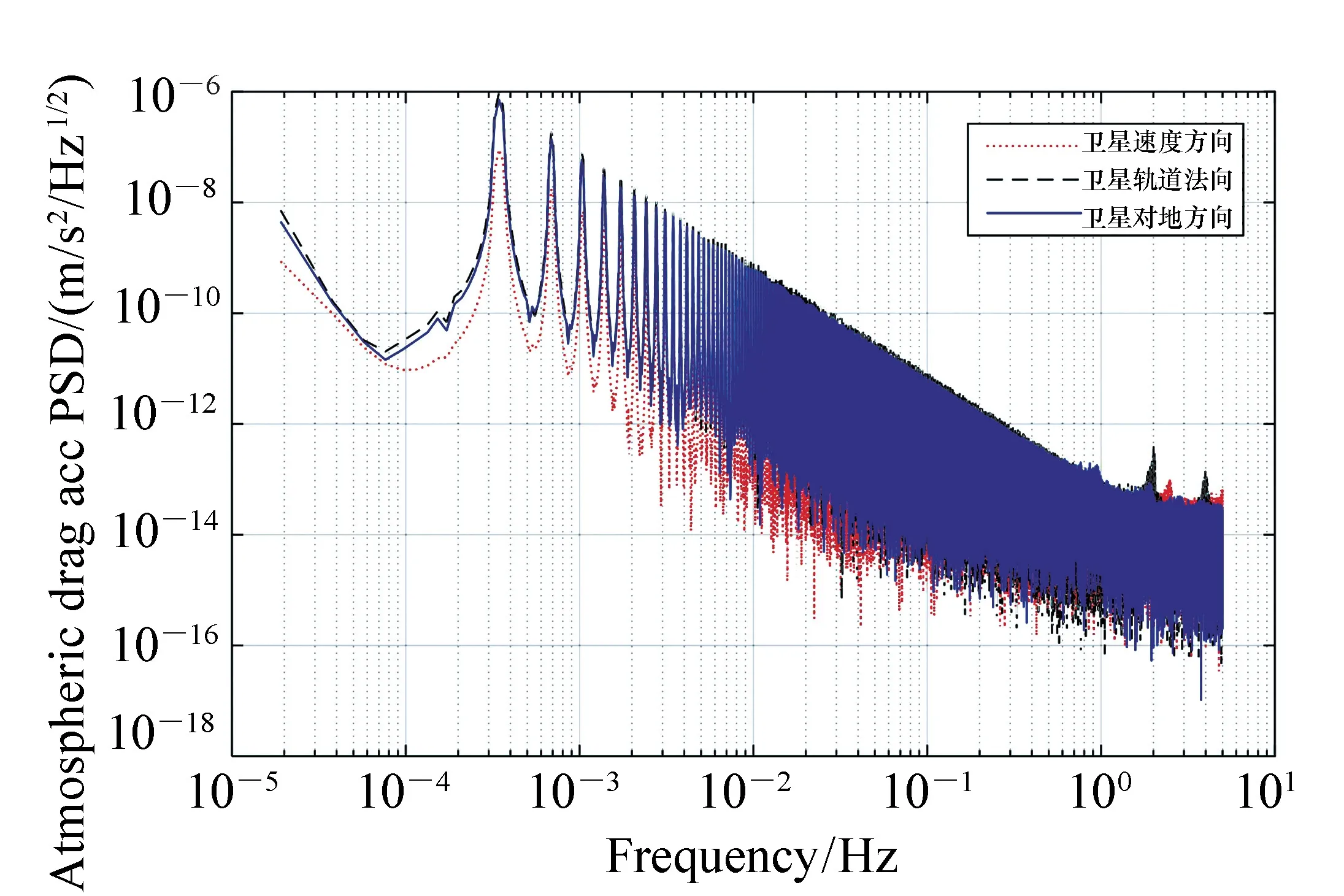
图8 600 km轨道大气扰动功率谱噪声Fig.8 Spectral density of atmospheric disturbance at 600 km
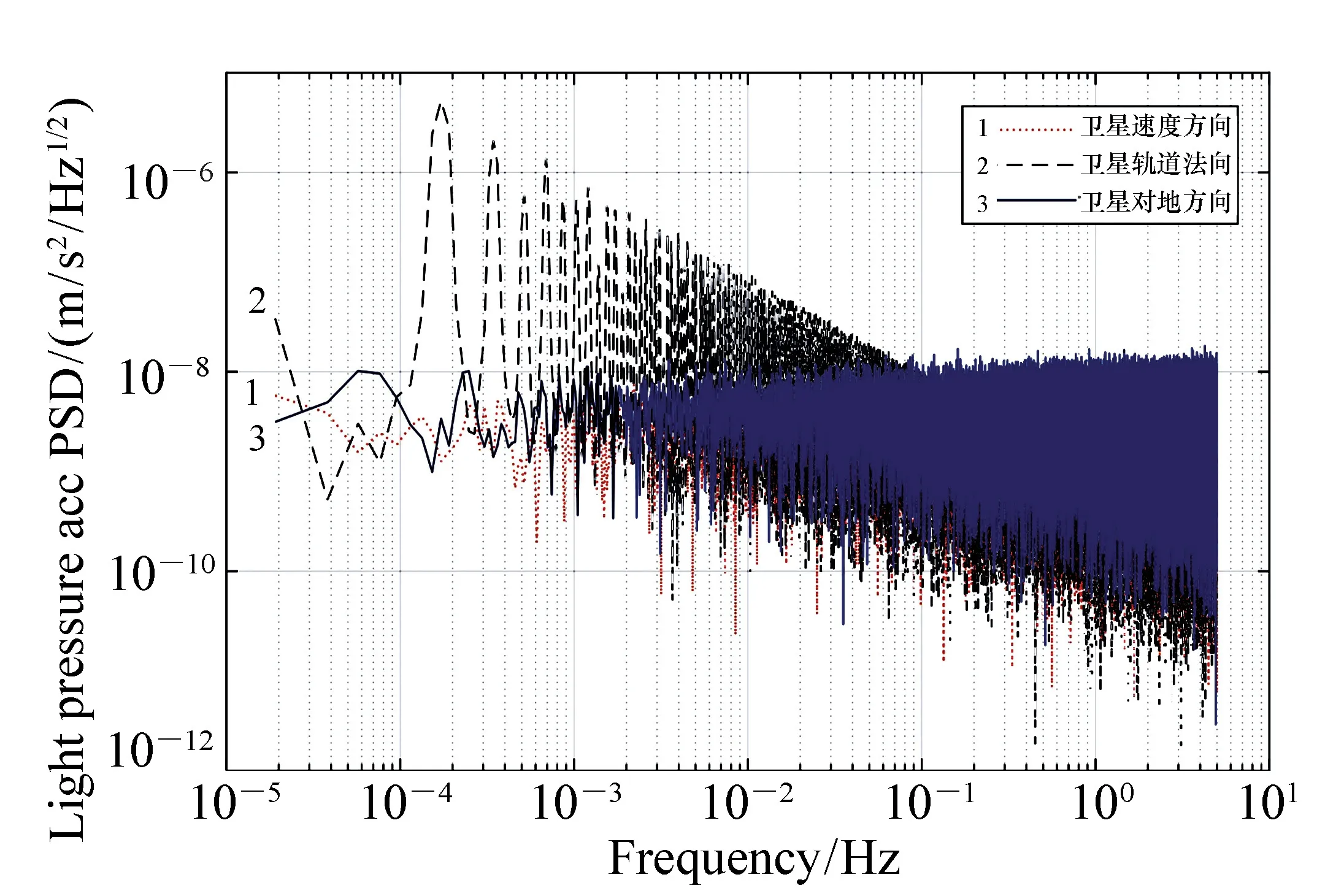
图9 600 km轨道太阳光压扰动加速度功率谱噪声Fig.9 Spectral density noise of disturbance acceleration sun pressure at 600 km
推力噪声、推力响应时间以及推力时延是影响无拖曳控制精度的主要因素,推力噪声直接影响无拖曳控制指令的精度,为满足未来引力波探测的任务需求,推力器的噪声在测量敏感频段内要小于0.1 μN/Hz1/2,推力分辨率要在0.1 μN以内。
3.3 无拖曳控制算法
对于超稳超静平台,无拖曳控制算法要具有较好的鲁棒性,即使系统参数发生微小变化时也能满足性能指标需求,同时,在满足性能指标的前提下还希望燃料消耗最小。
PID(Proportional, Integral, and Derivative)算法[35]与LQR(Linear Quadratic Regulator)算法[14,36]是两种经典的控制算法,在航天器无拖曳控制系统中主要用来做方案的初步设计和性能指标的初步估计。由于PID阶次有限,其对控制系统性能的优化能力有限,当LQR算法在系统参数发生变化而与标称参数不一样时难以保证闭环系统的性能,鲁棒性较差。Canutto[37-39]采用嵌入式模型控制方法(Embedded Model Control,EMC)对GOCE卫星的无拖曳控制系统进行了设计。EMC方法将航天器的轨道及姿态指向的模型包含在控制器中,用来观测系统的各个运动状态,同时采用扰动观测器对外部扰动进行估计。EMC方法的主要优点是在控制器设计中综合考虑了无拖曳和姿态控制环路之间的耦合关系以及对模型简化过程中引入的不确定性,具有良好的鲁棒性。
对于采用位移模式的LPF,由于其运行于日地L1点,其主要扰动来源于太阳光压,该卫星姿态和轨道运动都比较缓慢且各个环路之间的耦合关系也比较明确。LPF整个控制系统姿态和无拖曳环路共18个自由度,但各自由度之间耦合程度较低,可以近似为多个线性的单输入单输出 SISO环路。Fichter 等人[14,23]先对各个环路进行解耦分析,然后将闭环控制系统特定频段内的性能需求分别转化到对各个环路的传递函数频域特性要求,姿态控制系统的频率远低于无拖曳控制频域,并使用H∞方法设计控制器,最后对控制器进行降阶和鲁棒性分析。
对于加速度计无拖曳模式下,由于可以直接测量航天器受到的非保守加速度,因此可以直接对扰动加速度进行补偿,卫星当前时刻受到的外界非保守加速度可以由下式计算得到:
fng=s-1m-1(areal-abias-anoise)-

(1)

fc=s-1m-1(areal-abias-anoise)-

(2)

Fc=msatfc,
(3)
其中,msat为卫星质量,一个控制周期内可视为不变。
由于航天器受到的外界扰动具有不确定性且难以精确建模,采用加速度计模式下无拖曳控制精度依赖于对外界扰动的估计,难以满足空间应力波探测对无拖曳控制精度的需求;而位移模式的无拖曳控制方法要求控制算法对外界未知扰动以及测量噪声具有鲁棒性;同时,为了能使微推进系统尽可能长时间的正常工作,在满足控制系统鲁棒性的同时,希望能满足燃料最优。
4 无拖曳控制技术在我国空间引力波探测中的应用展望
通过对上述国内外无拖曳卫星的调研及无拖曳控制关键技术的分析不难看出,无拖曳控制是一个复杂的系统。为使空间引力波探测对航天器的非保守力残余扰动加速度达10-15m/s2/Hz1/2量级,需通过以下5个方面开展研究。
(1)飞行器系统级噪声指标分解及建模技术。惯性传感器的噪声源可以分为直接干扰源与间接干扰源,直接干扰源主要来自于整星磁场、自引力、整星热效应、星际间磁场、静电控制回路噪声、残余气体扰动影响以及激光辐射压影响,间接扰动源主要来自航天器机动、无拖曳控制以及非保守力对航天器的扰动带来的敏感轴效应以及互耦效应。需要对各项噪声源进行建模,通过对噪声模型的影响分析指导惯性传感器、微推力器、控制算法以及整个航天器整体的设计和布局。
(2)高精度惯性传感器技术,通过系统级噪声指标分解中的直接干扰源模型可以指导高精度惯性传感器的研究。检验质量的高精度加工、电荷管理以及剩磁处理技术可以降低检验质量与电极笼之间的耦合刚度;高精度位移传感标定、检测与控制技术,既能保证无拖曳控制的输入精度,同时能降低静电控制回路对检验质量的影响;高真空保持技术可以降低残余气体对检验质量的影响。
(3)解耦控制与微推力器技术,通过系统级噪声分解中的间接干扰源模型可以指导控制算法及推力器的研究。微推力器是无拖曳控制的执行机构,其噪声水平直接影响无拖曳控制的准确性,在航天器质量确定的条件下,必须降低推力噪声水平,而推力分辨率则直接影响推力器的调节能力。未来空间引力波探测单星都携带有双检验质量,具有18个自由度,而航天器最多只能实现6自由度的无拖曳控制,因此必须对单星的控制系统进行解耦,对其他自由度采用静电控制;同时,为了降低姿态控制对检验质量带来的间接扰动,控制带宽必须远低于有效测量频段的带宽。
(4)地面一体化耦合仿真技术,由于受环境的限制,在地面不能真实地模拟航天器在太空的无拖曳控制效果,地面半物理仿真及数学仿真是验证分析噪声耦合模型以及无拖曳控制效果的关键技术。通过对航天器系统的光、机、电、热、磁的建模,以及惯性传感器模型、激光干涉测量模型、微推力器的数字模型和控制算法的集成,并结合系统噪声指标分解模型,分析各部分的耦合惯性以及对无拖曳控制精度的影响。达到迭代优化航天器各系统的设计及优化结构布局,形成全系统的耦合仿真分析。
5 结束语
无拖曳控制是实现超稳超静航天器的关键技术之一。本文首先对以往成功的无拖曳卫星的控制系统设计方案进行了详细的总结,并对无拖曳控制的难点与关键技术进行了分析。最后,从系统级噪声指标分解、高精度惯性传感器、解耦控制以及微推力技术、地面一体化耦合仿真4个方面对我国空间引力波探测对无拖曳控制系统的需求进行了分析与展望。
猜你喜欢
国际太空(2022年7期)2022-08-16
空间控制技术与应用(2021年1期)2021-04-25
军民两用技术与产品(2021年10期)2021-03-16
现代装饰(2020年4期)2020-05-20
百科探秘·航空航天(2020年12期)2020-01-22
国际太空(2019年9期)2019-10-23
国际太空(2018年12期)2019-01-28
国际太空(2018年9期)2018-10-18
科学大众(中学)(2016年9期)2016-12-29
海峡姐妹(2016年2期)2016-02-27
