
电液伺服系统位置跟踪平整度控制策略研究
2019-07-18 11:11慧1侯冬冬23
液压与气动 2019年7期
王 慧1,侯冬冬23
(1.海军装备部装备审价中心,北京 100071;2.中国船舶重工集团公司第七一三研究所,河南 郑州 450000;3.河南省水下智能装备重点实验室,河南 郑州 450000)
引言
电液伺服系统由于其具有较高的功率重量比以及快速产生强大力的能力,已广泛应用于工业自动化和许多机械化领域,如机器人、飞机执行器和轧钢机等。然而,由于液压流体的可压缩性和伺服阀在超高压环境中的复杂流动特性,导致了其动力学特性的非线性。因此,各种反馈控制方法已经应用于电液伺服系统,以提高其位置跟踪性能[1-4]。
反步控制器因其良好的控制性能而广受学者的关注,已在电液伺服系统中成功应用。KADDISSI C等[5]针对电液伺服系统设计了基于非线性反步设计方法的实时控制器,并取得了很好的效果;AHN K K[6]针对一种电液伺服系统执行器设计了自适应反步控制器,取得了良好的效果;WON D[7]提出了一种基于高增益干扰观测器的反步控制器,并将其应用于电液伺服系统进行了实验验证;方一鸣[8]提出了一种自适应反步控制器,并在电液伺服系统中进行了实验验证;芮光超[9]针对电液伺服系统外部不确定干扰,提出了基于干扰观测器的反步控制控制器,并进行了实验验证。
尽管基于反步的控制器有效提高了电液伺服系统位置跟踪性能,但这些方法中使用的电液伺服系统动力学方程并不是其理想状态的动力学方程。此外,基于反步的非线性控制器设计方法往往需要对状态变量进行导数,这样就会放大传感器测量噪声及系统未建模特性,进而会降低系统控制性能。
基于平整度的控制器设计方法最初由学者FLIE-SS M[10]提出,近年来,基于平整度设计方法的控制器因其优良的控制性能和简易的设计方法而广受学者们的关注,并且已经在多种多样的控制系统中成功应用,例如直升机控制系统[11]、化学反应器控制系统[12]、三相逆变器控制系统[13]、压电执行器控制系统[14]。
因此,为提高电液伺服系统位置控制性能,提出了一种基于平整度设计方法的电液伺服系统位置跟踪非线性控制器,该方法不需要系统状态变量的导数,因而不会放大传感器测量噪声及系统未建模特性,进而会提高系统控制性能。
1 电液伺服系统动力学建模
图1为阀控液压缸的模型。
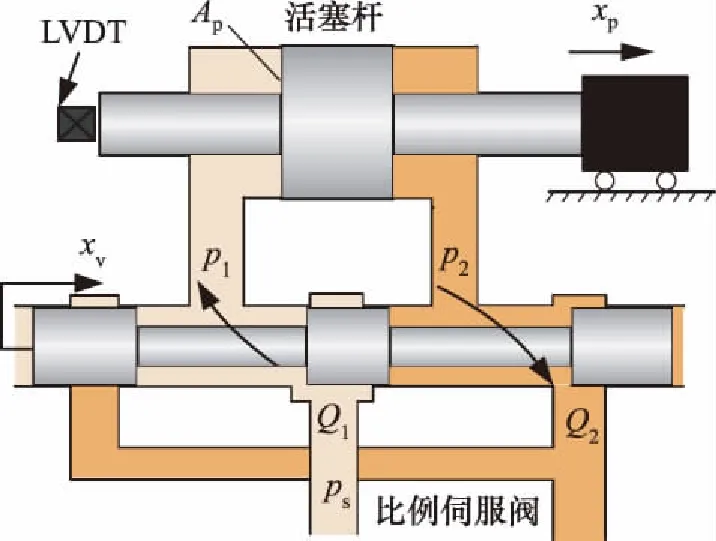
图1 阀控液压缸模型
液压缸流量连续性方程为:
(1)
式中,Ap为液压缸活塞的有效作用面积;Ctl为液压缸总泄漏系数;xp为液压缸活塞杆的位移;Vt为液压缸进油腔和回油腔的总体积;βe为液压缸油液的有效体积弹性模量。
负载力平衡方程为:
(2)
式中,Fg为液压缸作用在浮动天轮的力;m为总质量;Bp为液压缸黏性阻尼系数。
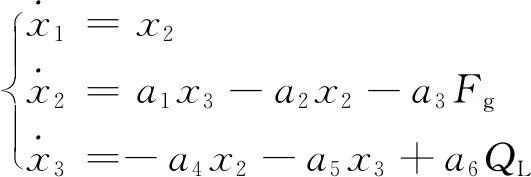
y=x1
(3)
其中,a1=Ap/m,a2=Bp/m,a3=1/m,a4=4βeAp/Vt,a5=4βeCtl/Vt,a6=4βe/Vt,y为系统的输出。
液压缸的负载流量QL是由伺服阀的阀芯位移xv控制的,因此:
(4)
式中,Cd为伺服阀的排放系数;w为伺服阀的节流窗口面积梯度;xv为伺服阀的阀芯位移;ρ为油液密度;ps为油源压力;pL为负载压降。
由于伺服阀的响应速度比整个电液系统要高很多,因此可以忽略伺服阀的动力学模型。因此,可以得到伺服阀的简化模型为:
xv=kvuL
(5)
式中,kv为比例系数;uL为伺服阀的控制电压。
由式(4)和式(5),液压缸的负载流量可以表示为:
(6)
由于伺服阀的排放系数Cd和伺服阀的节流窗口面积梯度w都是估计值,由式(6)可看出,直接得到伺服阀的控制电压是比较困难的。然而,伺服阀在额定压降下的额定流量往往是确定的。
(7)
式中,umax为伺服阀的最大控制电压;Qr为伺服阀的额定流量;Δpr为伺服阀的额定压降。由式(6)和式(7),可以得到:
(8)
伺服阀的排放系数Cd、节流窗口面积梯度w和比例系数kv都是正数,因此,由式(6)可得:
=sgn(uL)
(9)
因而,可以得到伺服阀的控制电压为:
(10)
2 基于平整度设计方法的控制器设计
2.1 非线性系统平整度特性
考虑如下非线性系统:

(11)
式中,x为系统的状态变量;u为控制输入,并且与系统输出y有相同的维数。如果存在系统输出y:
(12)
这样系统的状态变量和控制输入可以表示为一个系统输出y及其有限阶对时间导数的公式。即:
(13)
(14)
那么,式(12)称为平整度,这个系统输出称为平整度输出。
2.2 平整度控制器设计
(15)

(16)
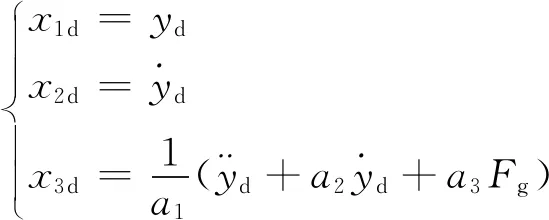
因此,系统期望状态变量的动力学可以表示为:
(17)
因此,可以得到系统开环输入QLd为:
(18)
定义跟踪误差变量为z=[z1,z2,z3]T=[x1d-x1,x2d-x2,x3d-x3]T。因此可得系统误差动力学方程为:
(19)
当QLd=QL,可得:
(20)
写成矩阵形式,可得:

(21)
因此,可以得到系统闭环输入为:
(22)
其中,K=[k1,k2,k3]T为系统控制增益。可以得到新的系统误差动力学方程为:
(23)
因此,如果恰当选择系统控制增益使得误差矩阵Ak为Hurwitz,那么系统跟踪误差z会逐渐趋近于0。因此,系统的控制律可以总结如下:
(24)
并将提出的控制器与如下的反步控制器进行了比较。
(25)
注:从以上平整度设计过程,我们可以看出整个设计过程没有对系统的状态变量进行任何求导,而参考信号对时间的导数不会放大传感器的测量噪声和系统未建模特性;相反地,反步控制器设计过程中,虚拟控制量α1和α2对时间的导数无疑会放大传感器的测量噪声和系统未建模特性,进而降低控制器的性能,并且反步控制器的设计过程更加繁琐。
3 仿真及实验研究
3.1 仿真验证
为验证提出的控制器的有效性,表1为液压系统位置模型的参数,并将应用于仿真和实验中。
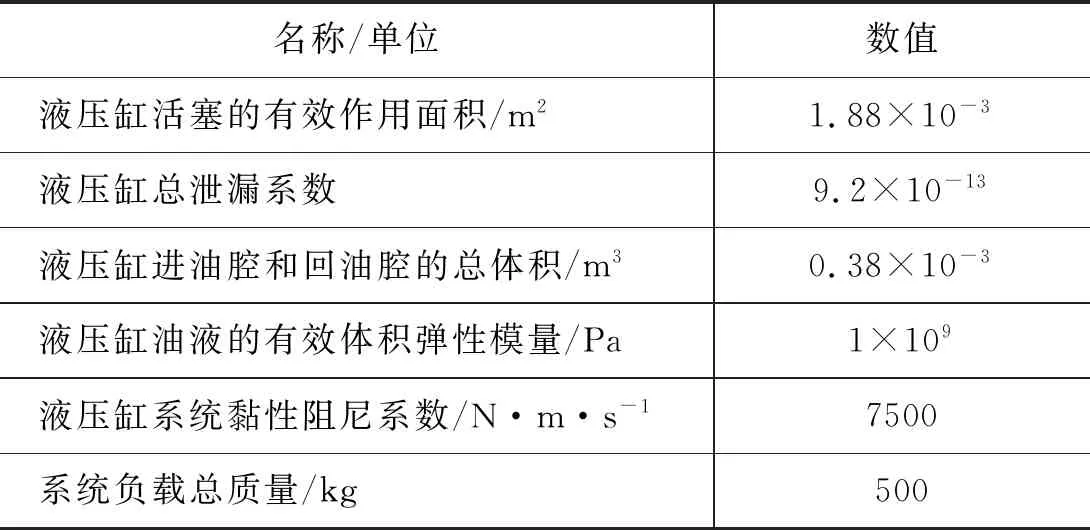
表1 液压系统参数列表
在MATLAB/Simulink中搭建了平整度控制器仿真模型和反步控制器分别如图2和图3所示。
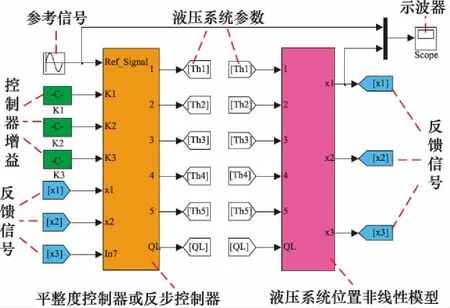
图2 系统仿真模型
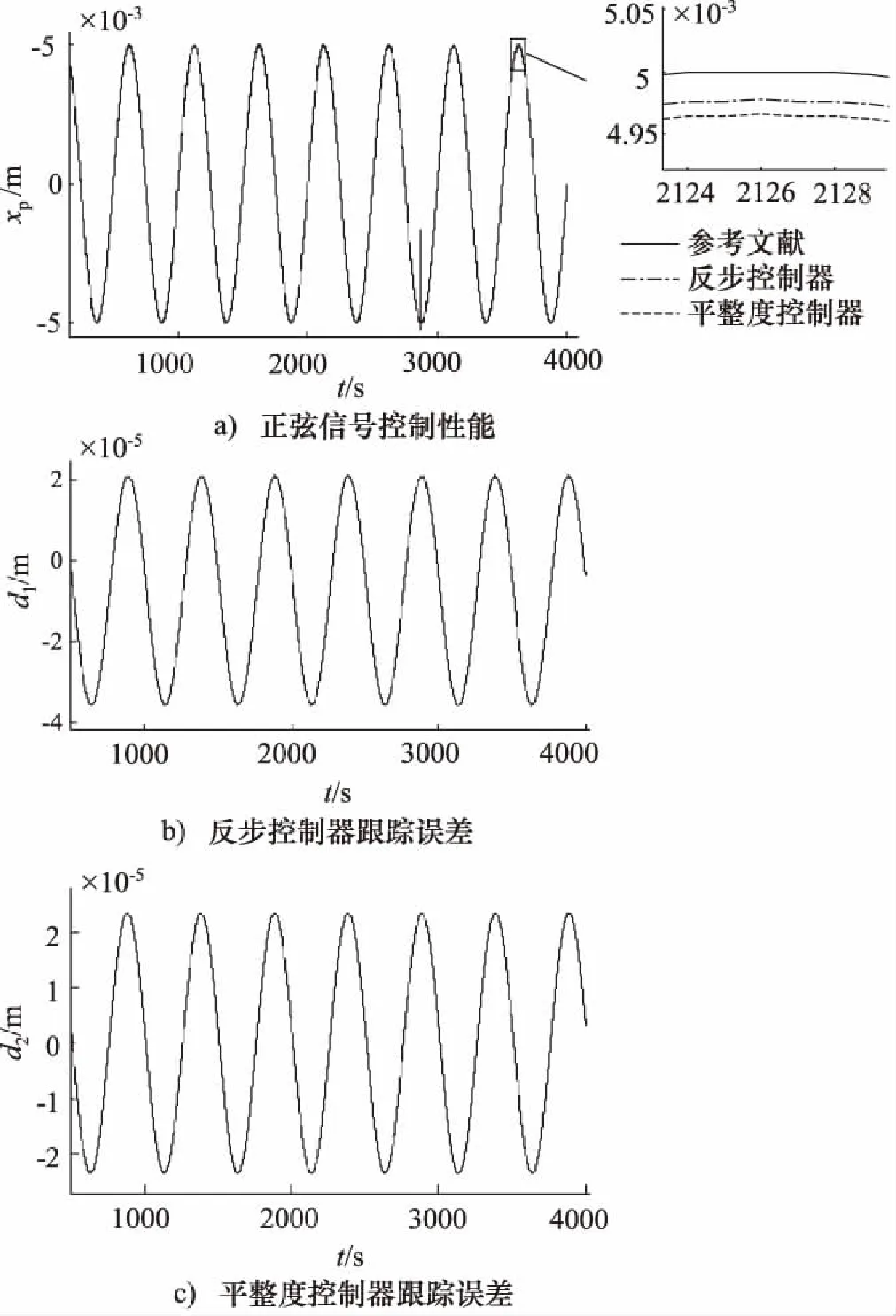
图3 正弦信号跟踪效果
仿真中,选取幅值为0.005 m、频率为2 Hz的正弦信号以及0~3 Hz的随机信号以验证平整度控制器和反步控制器的有效性。仿真中,反步控制器的控制增益为k4=350,k5=300,k6=285;平整度控制器的控制增益为k1=4.79×1012,k2=3.29×1010,k3=300。
由正弦信号仿真分析可知,反步控制器的跟踪误差在[-3.8×10-5, 2×10-5] m之间,而平整度控制器的跟踪误差在[-2.2×10-5, 2.2×10-5] m之间;由随机信号仿真分析可知,反步控制器的跟踪误差在[-5.5×10-6, 5.4×10-6] m之间,而平整度控制器的跟踪误差在[-1.6×10-6, 1.6×10-6] m之间;综上所述,平整度控制器的控制性能优于比反步控制器。
3.2 实验验证
图5为搭建的电液系统实验台实物。图6为控制系统图。基于MATLAB xPC Target 快速原型技术,上位机通过TCP/IP 协议与工控机IPC-610连接。在上位机MATLAB/Simulink中编程控制算法,并编译成C代码,最后通过TCP/IP下载到目标机中。位移传感器信号、油压传感器信号等通过信号调理系统转换成电压信号,再通过PCI-1716读入工控机中;伺服阀控制信号通过ACL-6126 输出。
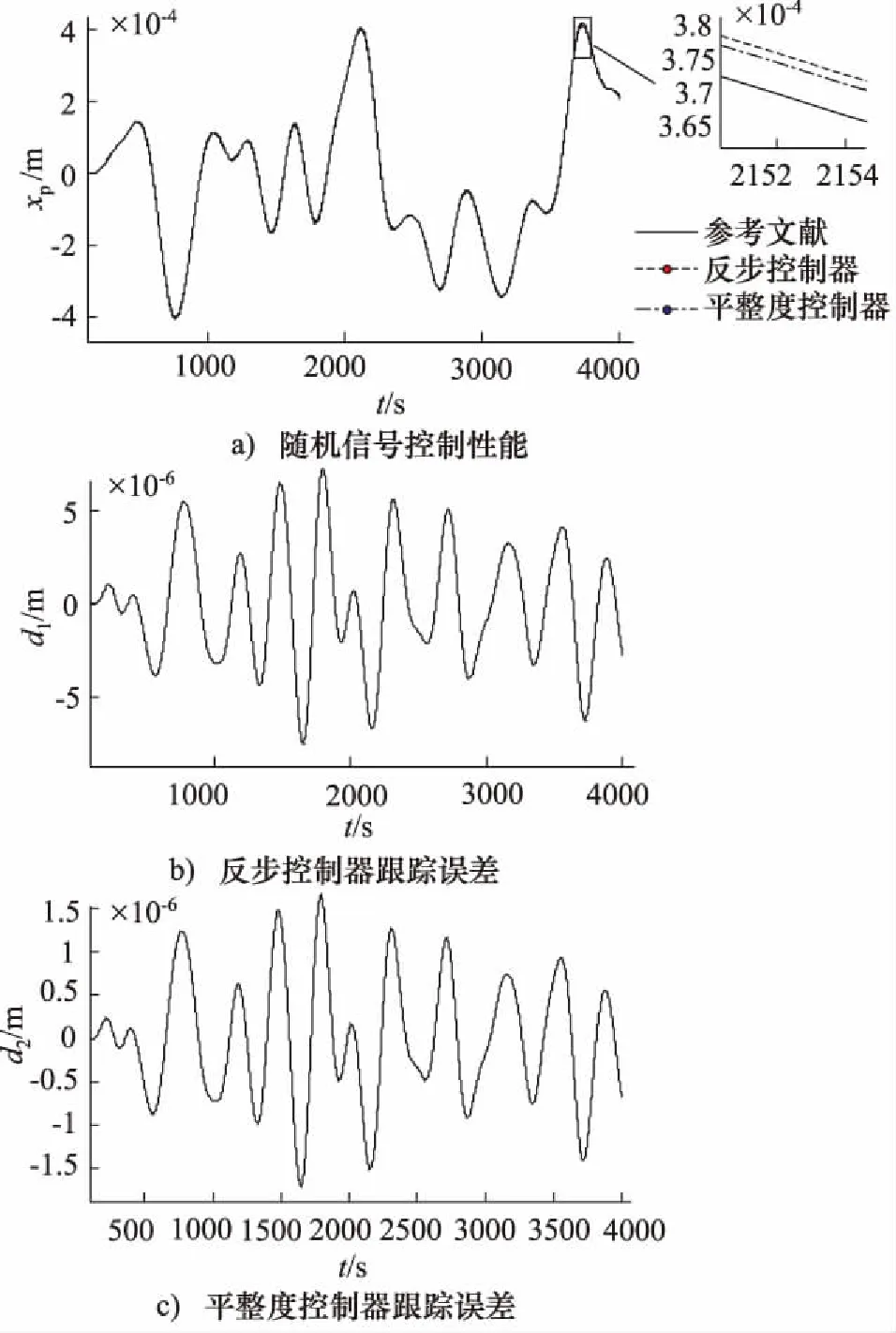
图4 随机信号跟踪效果

图5 实验台机械结构图
实验中正弦信号采用幅值为0.005 m、频率为2 Hz 信号;随机信号采用幅值为0.01 m、频率为0~3 Hz 信号,实验结果如下所示:
(1) 验证PI控制器电液伺服系统位置闭环控制性能,经过多次的实验验证,当比例系数Kp=20、积分系数Ki=0.3时,位置闭环控制效果最好;
(2) 验证反步控制器位置闭环控制性能,经过一系列实验,当控制增益k1=283,k2=237,k3=212时,正弦信号跟踪效果最佳;当控制增益k1=320,k2=260,k3=240时,随机信号跟踪效果最佳;
(3) 验证平整度控制器位置闭环控制性能,经过一系列实验,当控制增益k1=2.1×1012,k2=4×109,k3=-70时,正弦信号跟踪效果最佳;当控制增益k1=4×1012,k2=5×109,k3=-250时,随机信号跟踪效果最佳。
由上述图7、图8的2组实验数据对比可知,反步控制器位置闭环控制效果优于PI控制器,主要体现在两个方面:
(1) 提高了正弦信号和随机信号的跟踪相位;
(2) 提高了正弦信号和随机信号的跟踪精度。
由上述图7、图8的2组实验数据对比可知,平整度控制器位置闭环控制效果优于反步控制器,主要体现在两个方面:
(1) 进一步提高了正弦信号和随机信号的跟踪相位,系统实时性进一步提高;
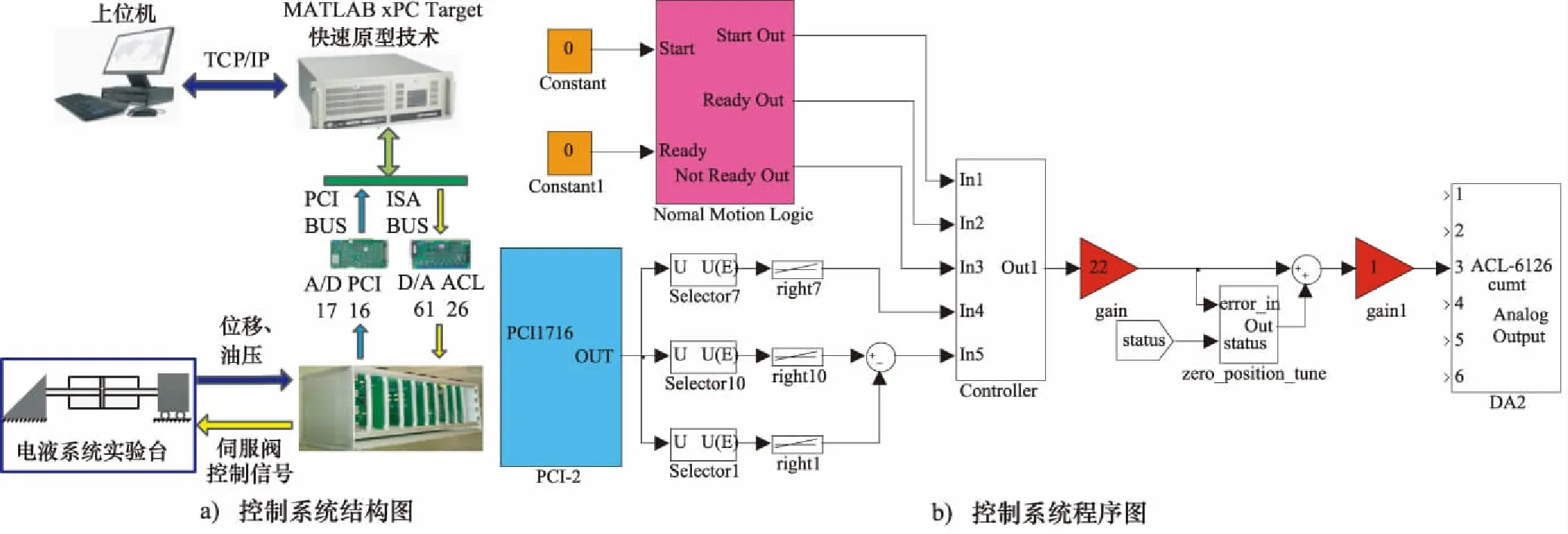
图6 控制系统
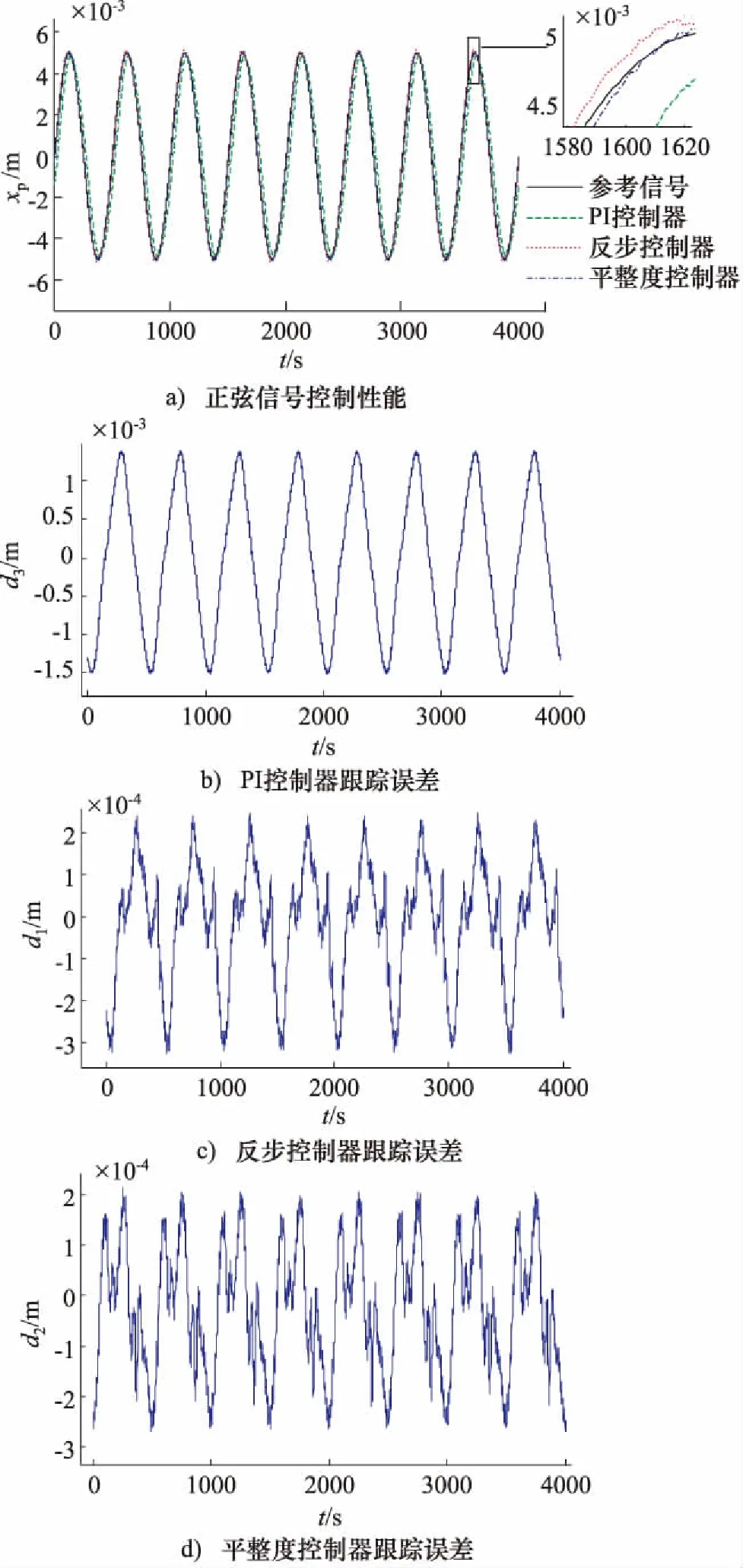
图7 正弦信号跟踪效果
(2) 从跟踪误差来看,反步控制器的正弦信号跟踪误差在[-3.26×10-4, 2.47×10-4] m之间,而平整度控制器的正弦信号跟踪误差在[-2.69×10-4, 2.13×10-4] m之间,反步控制器的随机信号跟踪误差在[-5.82×10-5, 7.31×10-5] m之间,而平整度控制器的随机信号跟踪误差在[-3.84×10-5, 5.53×10-5] m之间。而PI控制器正弦信号和随机信号跟踪误差分别为[-0.0015, 0.0014] m之间和[-1.09×10-4, 1.78×10-4] m之间。综上所述,提出了平整度控制的控制性能优于反步控制器和PI控制器。
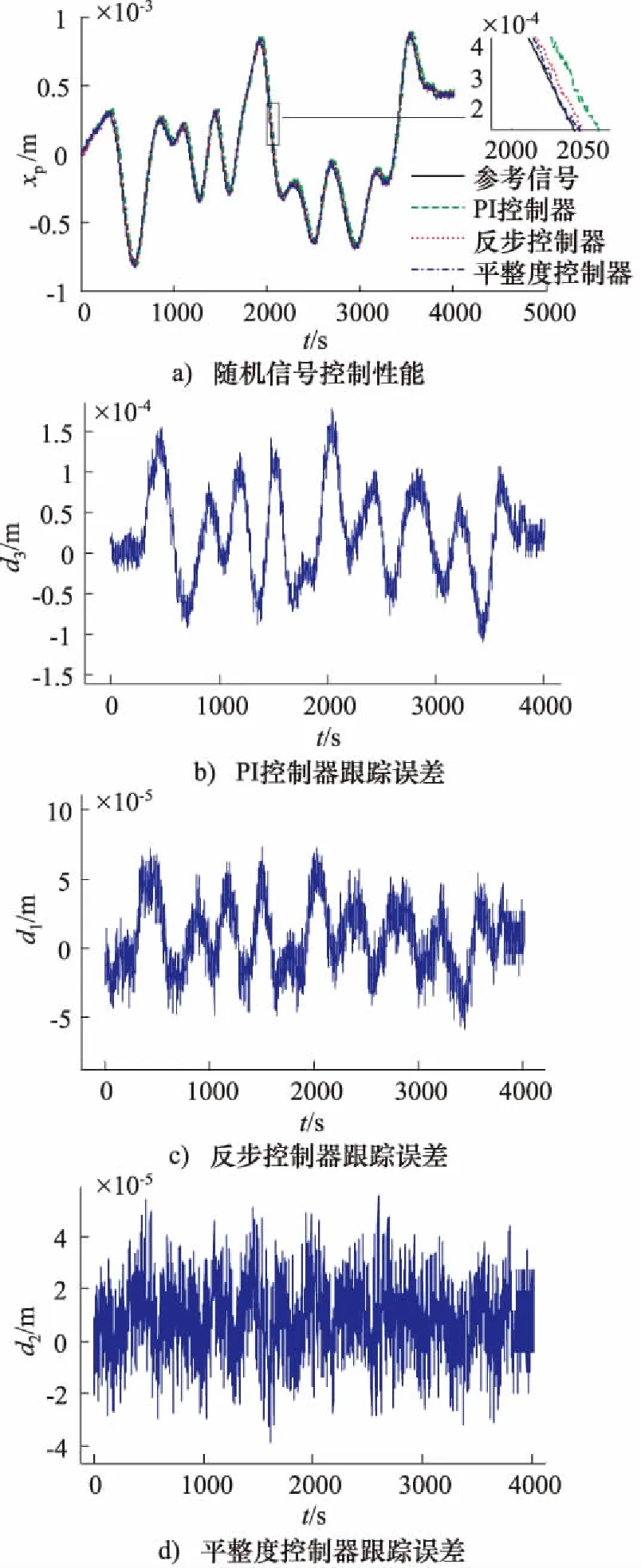
图8 随机信号跟踪效果
4 结论
(1) 建立了电液伺服系统位置非线性模型,得到了其状态空间方程;
(2) 利用电液伺服系统位置非线性模型,对提出的平整度控制器进行了完整的设计,得到了其控制律,并且给出了其反步控制律,由设计过程可以看出,平整度控制器的设计过程中不需要状态变量的导数,因而,其设计过程更简易,并且平整度控制器不会放大传感器测量噪声及系统未建模特性;
(3) 为验证提出的控制算法有效性,搭建了电液伺服系统实验台及其控制系统,并进行了实验研究,实验结果证明,与反步控制器及传统的PI控制器相比,平整度控制器性能更加优良。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
新高考·高三数学(2022年3期)2022-04-28
化工管理(2021年7期)2021-05-13
装备制造技术(2020年3期)2020-12-25
中学生数理化·高一版(2018年6期)2018-07-09
理科考试研究·高中(2017年7期)2017-11-04
制造技术与机床(2017年3期)2017-06-23
中学生数理化·高二版(2016年9期)2016-05-14
专用汽车(2016年4期)2016-03-01
北京航空航天大学学报(2016年4期)2016-02-27
