养老服务机器人的技术发展趋势
2019-07-25 09:21
计算机测量与控制 2019年7期
(黄冈师范学院 电子信息学院,湖北 黄冈 438000)
0 引言
进入21世纪,世界人口正在进入老龄化阶段,我国已经迎来了老龄化时代,并且成为全球人口老龄化形势最严峻的国家之一。到2020年,我国老年人将达到2.48亿。到2050年,我国老年人口将达4.8亿,占世界人口1/4;相当于全国每3~4个人中就有1个老年人,平均增长率为3.2%,几近人口增长速度的5倍,形势非常严峻[1]。众所周知,在我国,“空巢老人”不在少数,子女因为学习工作等原因背井离乡,家里只剩下孤零零的老人。如何解决老人的“孤独感”?尤其是“未来的老年人”在物质上的需求得到满足,精神需求如何满足呢?日本是人口老龄化政策较成熟的国家之一,现在已经有了比较成熟的服务机器人产业,机器人照顾老年人已成为常态,而我国服务机器人起步比较晚,但发展迅猛,加上巨大的需求,将会成为全球最大的潜在市场。
养老机器人是服务机器人的一种,是能够为老年人的日常事务和基本需求提供帮助和支持。服务机器人与人们的生活密切相关,我们现在已经从信息技术时代(Information Technology,IT)进入了数据时代(Data Technology,DT),未来将进入机器人时代(Robot Technology,RT)[2]。现在的机器人已经能给老人提供简单的生活护理和日常服务了,未来的机器人不仅可以陪老人情感交流,而且更加注重健康生活品质,给老人更多关怀和精神慰藉。
1 基本概念
机器人是综合了机械、电子信息、人工智能、生物医学、仿生学等多种学科的复杂智能装备[3]。随着信息技术、传感器技术和无线网络技术的不断发展,机器人在“智能”和“人性”上有了新的突破。大数据与人工智能在服务机器人中的应用,促使机器人的感知识别能力逐渐接近于人或其他生物。当无线网络和移动终端逐渐普及,机器人就可以通过网络来解决复杂问题而不需要考虑网络布线的难题,同时机器人之间的协作也带来了便利。
1.1 基本分类
服务机器人与网络技术相结合,就出现了网络机器人,普适机器人和云机器人。网络机器人是机器人技术和网络技术相结合的产物,由控制器、伺服器和传感器等各种网络资源组成。网络机器人可以通过网络通讯技术进行多机器人协作,最终完成单个机器人无法完成的任务,但它受到通讯、信息和资源访问等方面的制约。普适机器人是机器人技术与传感器网络技术结合的产物,它能通过周围的传感器网络获得全局的感知能力,大大提升了机器人与环境的认知和交互能力,并为机器人高效智能的服务打下了基础[4-5]。在普适机器人的基础上结合云技术,出现了云机器人。云机器人是指把机器人连接到某种云计算设备平台,共享信息和服务,机器人只需要通过网络发送一个需求信息,远端就会有成千上万的计算机来为它提供资源或完成相关任务了,它的大脑在云端,而不是机器人本体了。
1.2 云机器人
“云机器人”的概念是在2010年出现的,是由卡耐基梅隆大学的James Kuffner教授在Humanoids会议上第一次提出的,成为了一个重要的研究方向[6-11]。Kuffner教授认为,云机器人就是云计算与机器人的结合,就像其他网络终端一样,机器人本体不需要具备强大的计算能力或存储所有资料,只需要对云提出请求时,云端给予相应的响应和满足[12-13]。云机器人可以借助云超强的计算能力、存储能力和通讯资源,把机器人本体需要完成的复杂任务卸载到云平台,不仅使得机器人的知识能力不受物理本体限制而大幅度得到提高,而且使得机器人存在的系统复杂、低智能和高价格等一系列瓶颈问题从根本上得到解决[14-16]。云服务机器人通过互联网和云计算,帮助机器人互相学习、共享知识,不仅降低成本,而且提高自主学习的能力与对复杂环境的适应性。
2 基于云架构的服务机器人的体系结构
2.1 基于云的机器人服务平台
老年人最关心的就是健康状况,对老年人实现健康管理将是一个系统工程,它涉及到医院和保险公司及老人本人,也就是涉及到企事业单位和个人,如果要将整个健康管理系统建立起来,设备投入和各种资源的投入将是巨大的。如果将云计算和健康管理系统相结合,云计算可以凭借虚拟化的技术和资源整合技术,实现资源按需分配,可以降低老人到医院公司等地建立档案的经费。另外,云计算动态扩展性、虚拟化的超大规模以及资源复用,成本低廉,可以极大降低设备投入,减少用户的使用成本。
SOA是云计算的主流架构,它是热门的服务导向模型,主要由三部分组成:服务需求者、服务提供者和服务注册端(如图1)。该服务是可以被独立开发的,它们都有着标准接口的松散耦合组件。服务对于接口也是独立的,可以认为是独立单元。这样独立式的构架,是非常有利于服务开发的。基于SOA的机器人服务系统结合云计算就产生了机器人即服务RaaS(Robot as a Service),RaaS系统继承了大量的机器人单元,研究人员就把这些单元打包成服务,开发者或客户就可以根据需要把它们组合成新的机器人应用。
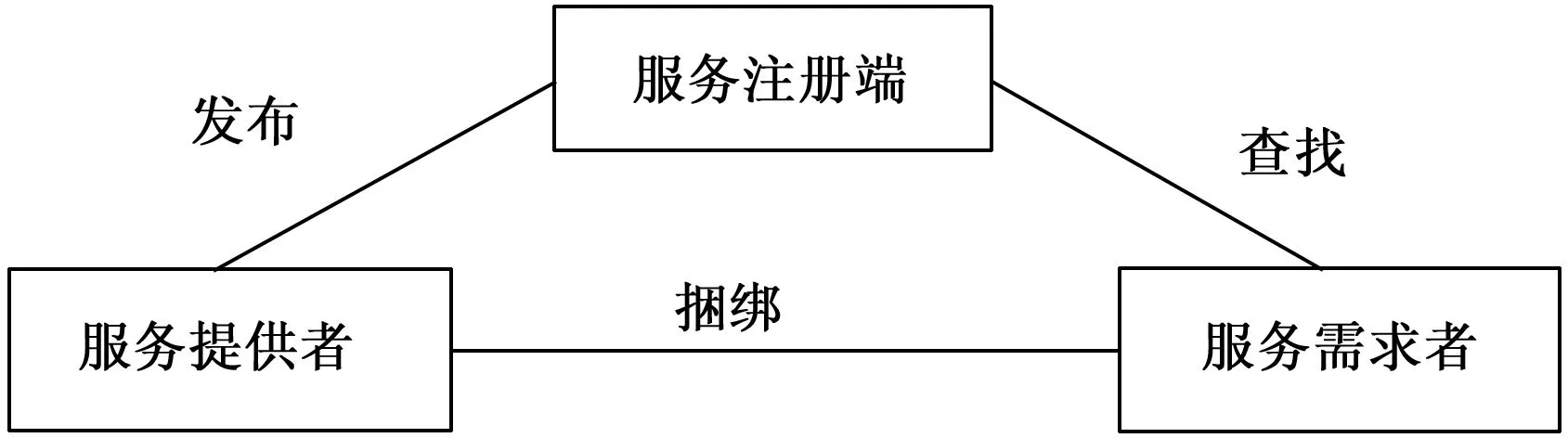
图1 SOA的工作原理
随着云计算和机器人的结合和云机器人的提出,科研人员根据对它们不同的思考和理解,提出了不同的云机器人服务平台。2010年,Rajesh Arumugam[17]提出了服务机器人云平台DAvinCi,该软件是面向服务性机器人的云框架,利用了Hadoop计算群和ROS系统,提高了机器人执行算法任务的效率,但对系统的网络延迟、通信问题还有待进一步解决。北京理工大学的赵连翔[18]等人提出了机器人云平台架构,包含资源层、管理层、服务层3层结构,它解决了多用户在资源共享、安全应用等方面的问题,并将机器人的资源和服务存储在云端,实现了机器人的遥操作。
总的来说,机器人云服务平台可以大致分为三类,它们分别是基于网络机器人的云服务平台(Robot+Cloud),基于传感器网络的云服务平台(Sensor+Cloud)和基于RSNP模型的云服务平台(Robot Service Network Protocol)。基于网络机器人的云服务平台有RoboEarth平台,RoboEarth是一个开源的巨大的网络数据库,它可以为全世界机器人服务,不同类型的机器人都可以在这里分享资源和信息。这类平台的机器人服务需要在机器人端执行,开发者如果没有专业机器人技术背景,是很难实现用该平台开发机器人服务的。基于传感器的云服务平台,它是把传感器虚拟化,当用户需要用时,可以被动态地调用。此类平台需要开发机器人服务与互联网服务的集成服务,所以开发人员必须是同时具备机器人和互联网背景的专家,也较难实现。基于RSNP模型的云服务平台,是分布式的服务架构,RSNP确定了机器人服务标准化规范,它可以将机器人服务和网络服务整合在一起,给各类机器人提供服务并合作。因为RSNP是基于网络服务技术的分布式架构,只要有网络开发经验的就可以进行服务机器人的开发了,所以在3种云服务平台中RSNP模型是最容易实现了。
2.2 云机器人系统架构
通过高效的云机器人架构,传统的服务机器人不仅可以大幅度瘦身,而且还可以通过云基础设施提供的弹性资源来克服局限性。该系统基于RaaS(Robot as a Service, 机器人即服务)的设计思想,一方面能利用云端资源为服务机器人提供服务,另一方面也能将机器人本地资源配置成云基础设置的一部分来提供服务,直接供用户调用[14-16,19-20]。该系统从上而往下主要包括四层(如图2所示),分别为用户层、应用层、云服务层和服务机器人层。

图2 云机器人系统的体系结构图
用户层主要是各种客户端;应用层是机器人的多种服务为客户端提供的应用程序;云服务层不仅负责机器人的资源管理与调度,而且还要通过云计算技术处理大量任务和海量的信息;服务机器人层主要是机器人负责执行和收集物理环境的数据信息。用户层和服务机器人层较具体,应用层和云服务层较抽象,下面重点讲一下应用层和云服务层。
2.3 应用层
云机器人可以选择接入到合适的云资源获取相应服务。通过云机器人系统的云平台环境,云机器人可以实现基本应用和高级应用2种服务类型。高级应用服务包括自主学习、知识共享、大数据挖掘、语音识别、SLAM、抓握等。基本应用服务是指云架构中的比较典型的服务XaaS(X as a service, XaaS),其中X可以用任何东西来替换, 比如云计算常用的3种服务模式:基础设施即服务 (Infrastructure as a Service, IaaS)、平台即服务(Platform as a Service, PaaS)及软件即服务(Software as a Service, SaaS),基础设施在最下端,平台在中间,软件在顶端。基础设施即服务(IaaS)是将场外服务器、存储和网络硬件等封装成服务直接供用户使用,如Amazon、Microsoft等大公司的弹性计算云和简单存储服务,为企业提供计算和存储服务;平台即服务(PaaS)有时也叫中间件,是对资源更进一步抽象,它提供给软件开发人员的是开发工具、数据库、Web服务器和应用程序的运行环境等;而软件即服务(SaaS)的针对性更强,它将某些特定应用软件功能封装成服务,它的面向对象是终端用户。养老服务机器人的健康服务就是以SaaS的方式来提供的,比如老人的“健康云”[21]服务包括信息提醒,运动服务,健康膳食等。针对不同老人的不同需求,可以以一种可扩展的、灵活的方式来实现健康服务的动态重组,此应用可以推广到家庭更多成员和更多人群。
2.4 云服务层
云服务层,主要负责对日常统计的数据进行分析、挖掘及统计,然后给出用户健康状况评估、用户环境分析和用户数据报表生成等。它不仅提供用户的远程查询服务,而且提供智能分析模型方案。云端会实时的动态分配云资源,同时利用云基础设施不断使机器人的硬件设施得到简化并为机器人提供更多的服务和可能性。根据使用的云资源类型的不同,可以将云机器人系统中的云平台分为3种模式[16](如图3)(1)基于远程云的模式:由远程云资源和机器人构成,机器人通过广域网访问远程云资源;(2)基于本地云的模式:由本地云资源和机器人构成,机器人通过本地网络访问本地云资源;(3)基于机器人的自组织云(Ad Hoc 云)模式:多个机器人构成云资源,为机器人自身或其他终端设备提供云服务,其克服了广域网的延迟等问题。
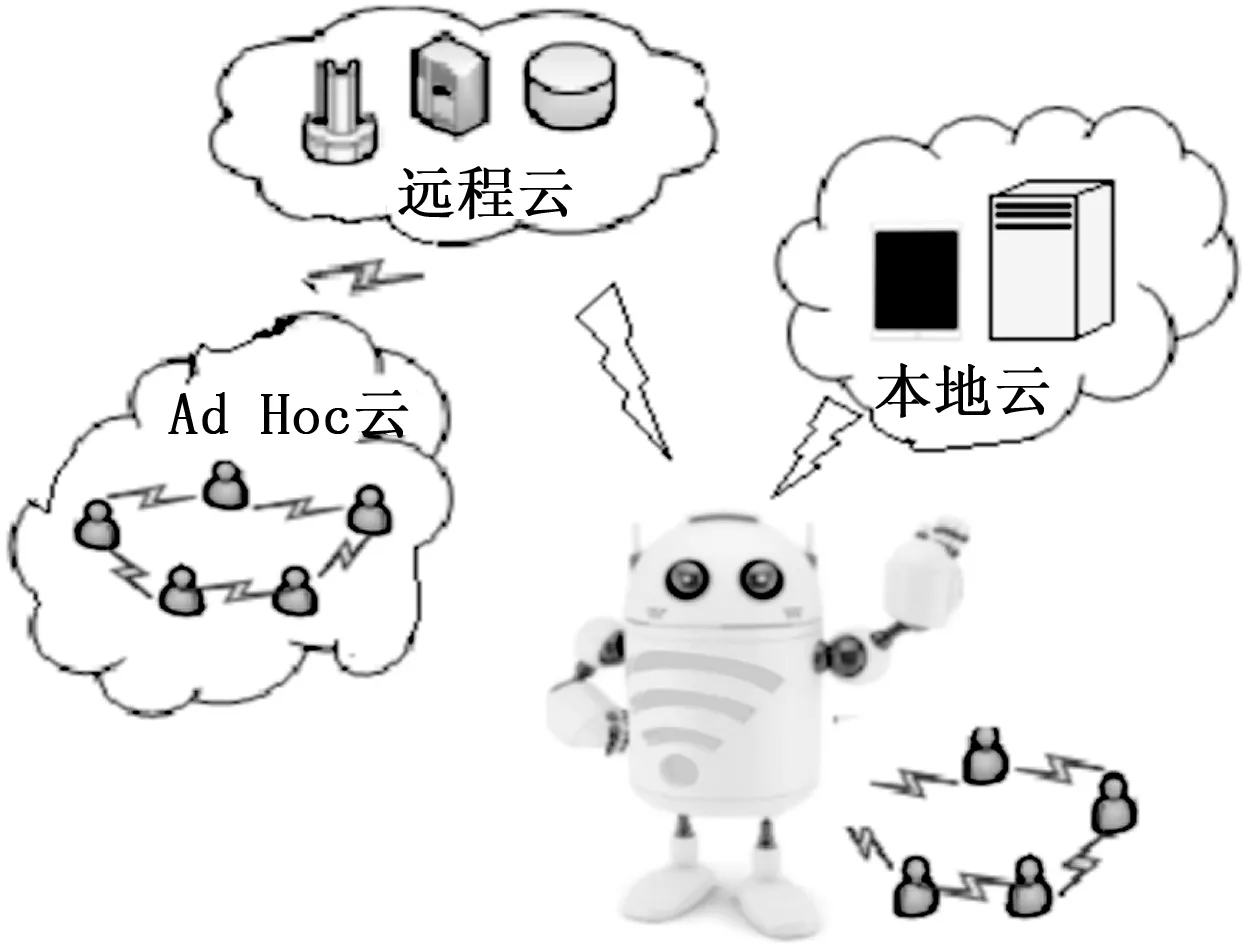
图3 机器人的云资源图
3 服务机器人的关键技术
面向老年人的陪护服务机器人,能够提升生活品质,关键是和老年人可以交流互动与情感陪伴,给老年人的精神上得到更大的满足。为了提高用户体验,服务机器人向着“人”的方向发展,它的推广与应用的关键技术主要包括面向非结构环境下、低成本的SLAM (Simultaneous Localization and Mapping即时定位与地图构建)实现自主导航和规划、人机交互技术、视觉的图像理解、高可靠性的语音识别、软体结构的新材料应用、人工皮肤技术等[2]。
3.1 SLAM技术
服务机器人的SLAM技术,可以实现机器人在居家环境的自主定位与导航并规划。它可以自动感知、理解并适应所处的室内环境,如果想要从一个未知位置到另一个位置,就得在移动过程根据位置估计和地图定位,同时建造增量地图[22-23],整个过程包括地图构建、传感、定位、建模等。伴随着云技术的不断进步,SLAM已经取得了很大的进展。但SLAM本身所具有的高复杂性和机器人资源有限制约着发展,为了实现机器人真正的自主性,云机器人创造了良好的突破口。云机器人卸载复杂的计算密集型任务到云端,云端以服务化的形式“按需”加载SLAM云调用包并持续输入必要感知数据,即可实现定位和地图构建导航功能。这样,机器人不仅提供了海量的存储空间和强大的计算能力,而且实现了机器人的知识共享和人类的分析经验的参与,可以使机器人导航应用更方便快捷[18]。
云机器人SLAM发展迅速,从开始的基于多机器人、多摄像机协作的SLAM,发展到深度学习的视觉SLAM,取得可喜成绩。山东大学的赵洋[24]等对传统SLAM算法和基于深度学习的SLAM算法做了深入的对比研究。他指出,深度学习算法依赖多层神经网络学习图像的层次化特征表示,可以实现比传统识别方法更高的识别准确率。将深度学习和SLAM技术相结合,可以生成环境语义地图,构建环境语义知识库,供机器人进行认知与任务推理,从而提高了机器人的服务能力和人机交互的智能性。传统的SLAM算法,具有较大的人为性,性能也会随光照强度等环境变化而下降,尤其是在物体识别领域不理想,成为了SLAM系统性能发展的瓶颈。近年来,SLAM算法尝试用深度学习从海量图像集中直接学习高层次特征,由于深度学习的特征蕴含在每一层深度神经网络的神经元中,因此这类尝试对机器人环境中识别物体的准确率更高,迁移能力增强,模型泛化能力也更强。综上所述,深度学习与SLAM的结合在一定程度上改善了场景识别等外界因素带来的应用局限性,同时对语义库构建的快速准确性产生了重要影响,从而提高了机器人的学习能力和智能化的服务水平。然而,目前深度学习的训练参数很大程度依赖专家经验,其训练效果依赖于数据库质量和已知场景的相似度,再加上要将深度学习架构应用于整个SLAM系统,未来还有很长的路要走。
3.2 人-机-环境交互系统
服务机器人的“人-机-环境”交互系统是指以环境/对象感知系统为基础,进一步建立人机交互系统[25]。目前主流的人-机-环境交互的方式是手势,语音,表情,控制面板等,以后手机、平板和可穿戴设备将成为移动控制端的主流趋势。
服务机器人领域,人机交互显得尤为重要,它是衡量服务机器人用户体验度的重要指标。一直以来,用户和机器人都会有很强的距离感。因为机器人大多只有枯燥的语言逻辑、固定的功能再加上面无表情,让用户没法和它亲近起来。当人工智能和云计算的迅猛发展,融合了很多智能和情感到机器人中,用户体验大幅上升。在人机交流的过程中,机器人可以通过传感器得知用户的表情、语言、动作、生理等情感状态,并可以调整自身的状态做出相应的情感反应,可以学习并了解到用户的需求和习惯,然后通过云端共享给其他的机器人使用,这样就极大提高机器人的服务效率并丰富了其服务功能。人机交互主要包括两个方面的内容,一方面是人机之间的交互信息,服务机器人可以借助可穿戴传感器及体感外设等设备来检测用户状态,评估用户的健康状态及跌倒检测等服务;另一方面是用户对机器人的主动控制,需要机器人能理解用户并确保能完成用户的控制和任务指令。
另外,机器人能和人自然地交互,完成各项服务任务,需要它能自然感知和理解环境,尤其当外部环境变动大,单靠机器人本身的能力使很难完成各种高智能化的家庭服务任务的。这就需要将智能空间技术应用到环境中去,将室内装配上人工地标、传感器、摄像头、通信设备等计算机系统,建立一个“人-机”共存的生态环境。
3.2.1 环境的感知与适应
智能空间技术是指将感知和执行器件安装在空间相应位置,因此降低了机器人本身携带感知器件的要求,能够在动态的环境里更加稳准快的实现服务任务。如果把智能空间技术应用于服务机器人系统,机器人将更加容易实现对空间内部的人和物的全面感知,从而执行相应的服务任务。机器人与环境交互式通过将触觉、视觉、听觉、嗅觉、力觉等多种传感器信息融合处理,然后获得具有甚至超过人的感知能力,家庭这样非结构化环境的适应能力也显著提升。
老人是服务对象,智能空间和服务机器人需要通过观察老人的行为来理解老人的想法和需求,以便对老人进行特别监护。比如通过传感器装置实现对老人脉搏、血压、体温等基本生命参数进行观测,能检测出异常身体状况并发出相应的服务指令,使得机器人能自动的执行相应的服务。另外,如果老人需要物品的传递和整理,就可以通过在物体上布置各种人工标志或RFID标签等方法,对被操作物实现快速定位和识别。人工标志或RFID标签中包括物品属性、操作方式和路径规划等,可以方便机器人快捷的完成服务任务。
随着智能家居等设施的市场化,智能空间的搭建越来越容易,进一步为服务机器人降低了成本,为逐步走入社会家庭提供了重要的技术支持。未来的服务机器人智能空间将包括多种异质机器人,机器人之间会有更多的的协作,服务任务也会变得更加复杂,这将涉及到异种智能空间的互联技术和机器人执行任务的智能空间无缝连接技术,这些将成为未来智能空间技术研究的重要课题[26]。
3.2.2 视觉技术与图像处理
人类主要通过视觉、听觉、触觉等器官感知外部世界,其中一大半的信息都是由视觉获得的,所以视觉的重要性是不言而喻的。机器人的视觉系统,是利用计算机来模拟生物视觉功能的科学技术,为了认知现实世界,实现对客观世界三维场景的理解,它的首要目标是要用图像创建或恢复现实世界模型。图像创建一般是三维场景在二维平面的灰色投影的过程,然后再进行多点对一点的映射逆变换从二维平面恢复三维立体场景。
采用一般的图像处理器较难实现实时图像处理,而采用以Hadoop云平台基础架构,它的分布式文件系统和MapReduce以及并行计算处理,大大降低了图像识别的运行周期,有效地提高了图像识别的准确率和图像处理速度。将深度学习与云计算相结合,微软图像识别引擎的深度神经网络训练已经到达150层,它将是云服务机器人发展的一个重要的方向。
To sumup,this study examines and tries to prove the hypothesis that various modes,or in our case,the visual mode,find their way into textual narration,and with such intertwining of different modes in the textual content,both humor and politics can be discussed implicitly or metaphorically.
3.2.3 语音识别技术
语音是在人类情感交互的过程中作为人类获取信息和沟通最方便最有效的工具之一,它传达的信息包含文字符号部分,还包含情感和情绪部分[27-28]。传统的语音合成技术,完成的仅仅文本符号的语音转化,而忽略了语音信号中情感的信息。语音情感的识别分为与内容有关的情感识别和与内容无关的情感识别,同样一句话,被不同经历尤其情感背景不同的人说,其表达的效果和意思就完全不同。情感的大部分信息主要体现在韵律上,可以通过调整句子的基础频和时长等韵律来表达。重庆邮电大学的张若凡[29]等人提出了基于语谱图的老年人语音情感识别方法,他们采用改进的维纳滤波算法,针对老人年语音情感库进行了语音增强,选取合适的语音情感库,进一步进行预处理、提取和调整,转换成要求的格式,接着用CNN进行训练,并用分类器进行分类,最后得出老人的情感识别结果。
基于云技术的语音云服务,不仅降低了对机器人本身的硬件要求,而且可以提升语音识别的准确性和识别率,提升了用户体验,使人机交互更加自然和人性。例如使用科大讯飞语音云平台,它是以 “云+端”的形式,向开发者提供了一系列的语音合成、语音搜索及语义理解等智能交互服务,开发者能通过它拥有超强的语音识别能力,而不需要在本地维护庞大的语音识别库。为了使老人可以有更好的交互体验,在初始化自然语言处理引擎时需要上传语义库,交流就可以更符合真实场景了[28]。
总之,传统语音信号处理识别已经从在单机中完成的,渐渐转到云计算环境的平台上,例如Hadoop平台,它可以充分发挥MapReduce并行计算的优势,能够将数据处理和任务分配到多个计算机中同时进行,大大提高了语音信号处理的效率,云计算在语音平台中的应用也成为趋势。因此,基于云的服务机器人的语音识别技术必将成为机器人水平发展的重要指标。
3.3 仿生技术与软体结构
养老服务机器人外形设计应该拟人化,现在的仿人机器人就是追求拟人的外貌、动作和语音,甚至情感,这样更容易产生亲切。尤其在老年人处于孤寂状态,这样对老年人的精神起到很好的慰藉作用。
服务机器人的软体结构使用了新型的合成材料,它可以模拟自然界的生物运动模式。涉及材料、微机电、液压、控制等多学科,从材料、设计、加工、传感到控制等方面开展的交叉与融合研究。人工皮肤是可以替代人的皮肤组织的,它是仿生材料[30]的一种,能模仿生物的特点、特性和系统结构及相互作用的过程,为机器人实现与人类似的行为功能提供技术支持。通过这种材料能让机器人获得一种接近人类的皮肤和肌肉,结合结构驱动一体化的设计,它可以感知压力并与大脑沟通,把压力信号改变成电子信号,传递给大脑,令机器人在智能化的基础上拥有“感觉”,无论从外观还是行为感知功能,机器人都越来越趋近于“人”了。
仿生材料与软体结构模仿生物系统的原理、结构和相互作用,让机器人具备了低能耗、效率高、环境适应力强等优点,其中,仿生材料、人工肌肉和结构驱动一体化设计将成为未来研究的热点问题。
4 养老服务机器人发展的机遇与挑战
4.1 国家政策支持
近年来,为了实施《中国制造2025》将机器人作为重点发展领域,进一步推进我国机器人产业快速健康可持续发展,特别制定了《机器人产业发展规划(2016-2020年)》和《新一代人工智能发展规划》,然后到《促进新一代人工智能产业发展三年行动计划(2018-2020年)》[31],出台了一系列支持机器人产业发展的政策措施,体现了中国已经把人工智能技术提升到国家发展战略的高度,为机器人的发展创造了前所未有的优良环境。在服务机器人领域,重点推进专业服务机器人实现更多的细分并成体系,个人/家庭服务机器人实现大规模市场化[32]。如果把服务机器人的发展与中国老龄化社会的大背景相结合,对于解决人口老龄化问题,无疑是巨大的支持与帮助。
4.2 安全可靠性
云机器人技术作为一种新兴技术,还有许多问题如系统的安全性、通信协议的可靠性和有效性等需要探索与解决。除此,由于是服务机器人,还是面向老人的,我们还需要考虑众多其他因素。首先需要考虑材料和设计上确保整体的机械安全可靠,不能因为降低成本而忽略;第二,要考虑到老年人身体的退化,操作很容易出错,不能因此造成对老年人的伤害;第三,老年人的适应能力不如年轻人了,如果机器人的使用年限能适当延长,将会给老年人带来福音[33]。当老年人熟悉了服务机器人的使用也有了感情,若因为年限而不得不更换时,老年人可能会出现抵触情绪,接受新的机器人的又需要很长的时间。
4.3 5G无线通信
5G无线通信是多种新型无线接入技术和现有无线接入技术集成后的解决方案总称,它最大的优势体现在“物联网”上,对于机器人而言,不仅意味着更快的传输速度,更稳定的信号,更低的功耗,还意味着更好的安全性和更高的服务水平。5G技术需要一种分布式的核心操作系统,可把终端扩展至5G网络再到云端。5G网络将是一个无处不在,它是具有超低延迟、高度弹性化、超高的承载能力以及超强的通讯能力的虚拟化基础设施,能够透过云端的巨大存储和计算能力,将机器人和智能家居设备、可穿戴设备等智能终端结合在一起,为机器人的智能化又可以推进一步。目前,为机器人赋予与人完全一样的行动功能还是一个挑战,但透过5G技术可以充分提升机器人的行动力和认知服务。
随着5G通信技术的到来,云机器人的发展迎来了契机。5G网络可以从容应对机器人对带宽和时延的挑战,它的网络切片和MEC也能为机器人的服务应用提供端到端定制化支持。由于服务型机器人应用场景的同质化较高,比起不同行业需求千差万别的工业型机器人,云机器人的服务共享网络更容易实现,但目前我国机器人的使用密度还很低,一定程度上制约了服务机器人的发展。所以,大面积推广机器人的使用势在必行。
5 结束语
随着老龄化社会的到来,科技的进步与劳动力不足等因素推动着服务机器人的发展,它将成为21世纪高技术服务业的重要组成部分[34]。互联网技术的迅猛发展,随之诞生的云机器人让机器人服务质量又上了一个新的台阶。云机器人可以根据设计功能的不同给老年人提供不同的服务,现在的机器人可以提供基本的生活服务,未来的云机器人还可以陪老人聊天和娱乐,给老人带来更多精神慰藉。所以,云机器人在未来的养老系统中占据着举足轻重的地位。
猜你喜欢
华人时刊(2022年9期)2022-09-06
阅读(快乐英语高年级)(2019年5期)2019-09-10
电子制作(2019年14期)2019-08-20
电子制作(2019年9期)2019-05-30
小说界(2018年5期)2018-11-26
股市动态分析(2015年49期)2015-09-10
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
科技智囊(2009年8期)2009-08-26