基于机器视觉的变压器油位仪表识别技术研究∗
2019-07-31 09:55党晓鹏张建华
计算机与数字工程 2019年7期
郁 飞 党晓鹏 张建华
(国网江苏省电力公司检修分公司 南京 222004)
1 引言
指针式仪表由于读取简单、防水、环境适应性强,因此广泛运用在变压器油位指示仪中。在电网运维巡检中,以人工巡检、手动抄表、人工记录模式对变压器的油位进行检定,存在耗时耗力、自动化水平低以及误差率高等问题。因此在现有变压器油位仪表的基础上,采用机器视觉技术实现仪表读数的自动判别具有极强的现实意义[1~3]。
将机器视觉技术应用到指针式仪表识别的研究已经取得丰硕的成果。文献[4]在LabVIEW 软件平台上应用中值滤波算法进行滤波,并采用线性滤波和不变矩的图像分割算法提取感兴趣的指针目标,实现了指针式仪表实时读数系统的设计。文献[5]提出一种面向百分表的自动识别算法,通过摄像头将百分表图像提取出来,利用区域分割的方法将仪表表盘各个部分特征提取出来,基于百分表的特征将数字和刻度分别标记,最后完成仪表读数的识别。文献[6]针对机器识别算法容易受环境和仪表形状影响而导致识别准确率难以达到预期的问题,提出一种基于仪表读数区域划分的识别思路,并通过实验验证了这种方法具有较好的对识别准确率。
本文在上述研究成果的基础上,针对变压器油位仪的结构特点,提出一种优化的指示仪表机器识别方法。该方法通过采集指针式油位仪表的图像,在对仪表边缘检测的基础上进行二值化处理,得到完整清楚的仪表图像后利用霍夫变换计算出指针的方向,实现仪表读数的自动识别。
2 图像预处理
2.1 图像二值化
为消除由于采集过程环境因素形成的仪表图像的噪声和图像亮度偏差,最大限度凸显出仪表图像的整体和局部特许,为图像识别提供良好的素材,本文在基于类间方差最大化的阈值优化选择基础上,对仪表图像的像素点的灰度值全部设置为0或255,使图像呈现出黑白效果[7~10]。
假设图像 f(X,Y)的大小为M×N 。假设图像的灰度阈值为T,平均灰度为η,类间方差为δ。仪表轮廓像素的图像占比为ω0,仪表轮廓像素的平均灰度为η0。仪表轮廓外图像像素占比为ω1,仪表轮廓外图像的平均灰度为η1。如果采集图像中灰度低于阈值T的像素数量为P0,大于阈值T的为 P1,那么就有如下关系[11]:
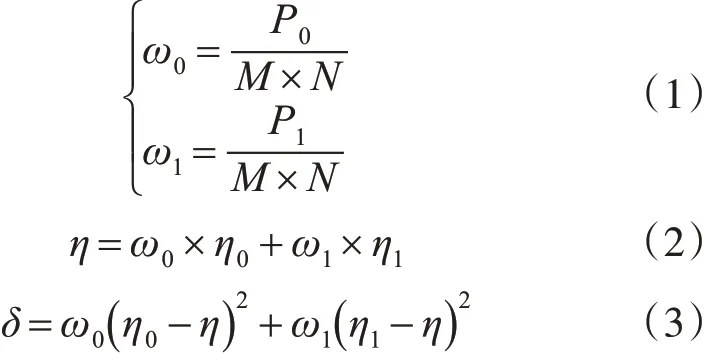
联立式(2)和式(3),可得出:

当类间方差δ 取得最大值,仪表图像和仪表轮廓外图像之间的灰度差异最大,此时灰度阈值T 获得最优取值[14~16]。设黑白化的采集图像为δ( )x,y ,则图像的灰度分布满足下式[17]:

2.2 二值化图像的逻辑运算
二值化图像逻辑运算的目的是提取有效的仪表指针的边界图像分量,对指针图像进行形态学过滤、细化和修剪。图像形态处理的算法包括膨胀和腐蚀[18]。
膨胀算法的目的是使得指针图像更加完整,不至于出现间断[19]。在Z图像集合中有A和B两个结构元素,A被B膨胀的过程为:首先用结构B对结构A 的进行逐像素扫描,然后对重复区域的二值化图像进行逻辑与运算,如果运算结果为0,则该点像素灰度设置为0,否则设为255。
腐蚀算法是对指针图像边界多余像素进行删除,使得指针轮廓变得更加精简和清晰[20]。最Z 图像集合中的A 和B 两个结构元素,B 对A 进行腐蚀的过程为:首先用结构B 对结构A 的进行逐像素扫描,然后对重复区域的二值化图像进行逻辑与运算,如果运算结果为1,则该点像素灰度设置为255,否则设为0。
经过膨胀和腐蚀处理后的仪表指针图像轮廓清晰,没有间断处和突兀点。
2.3 指针边缘处理
由于Canny 算子具有滤波、增强、多阶段优化检测的突出优势,因此采用该算子对指针图像的边缘进行检测[21]。检测步骤:1)利用高斯滤波器实现对油位指针的边缘平滑;2)通过差分法对图像灰度值的梯度幅值和方向一阶偏导方程进行求解;3)结合梯度方向和梯度幅值对较粗的边缘进行最大值的抑制,去除伪边缘;4)通过设置强、弱双阈值对真边缘进行连接,得到最终的指针轮廓图像。
3 油位指针读数识别
3.1 油位表中心确定
采用霍夫变换算法定位油位表的中心。首先进行直线的直角坐标变换成参数表达式。设直线方程表达式为

将式(6)转换成基于参数的表达式为

式(7)中 ρ 为原点投影至直线的长度。θ 为直线与x轴的夹角。
把直线转换成参数表达形式后,油位表轮廓内部的所有点所对应的直线会在表中心点相交,其中最长的直线显然就是油位表指针。
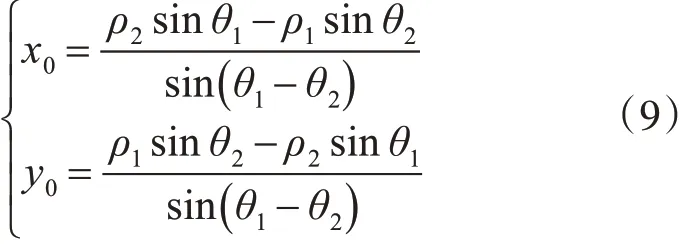
通过对指针不在同一位置的油位表的两个采集图像进行比对,可以实现对圆心的定位。仪表图像背景为灰度值为0,指针灰度值为255,对两个不同指针位置的图像进行逻辑异或运算。由式(7)延伸出两个图像的指针参数表达式为

式(8)中两条直线的交点为油位表中心位置,由此推导出表中心的直角坐标为
3.2 指针方向判定
依据式(7)和最长直线判据确定油位表指针后,对指针和-30°刻度线的夹角进行识别。设指针和-30°刻度线的夹角为α,则识别的夹角可能为α或α+180°,因此需要对指针方向进行明确。由于油位表的中心位置已经确定,由-30°刻度线和表中心组成的直角坐标系对指针的两个端点进行定位,指针的方向由离表中心较近的端点指向离表中心较远的端点。
3.3 读数计算
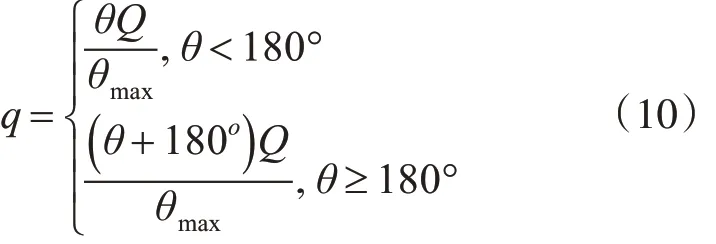
根据输入的最大量程,对指针读数进行自动计算。设最大量程为Q,-30°刻度线和指针夹角为θ,-30°刻度线和最大量程的夹角为θmax,则读数q为
4 实验分析
选取UZF2-140 型油位计进行实验,对上述机器识别技术的效果进行分析和验证。对上文所述的识别思路进行总结,得出实验中应用于油位计读数自动判断的算法如图1示。
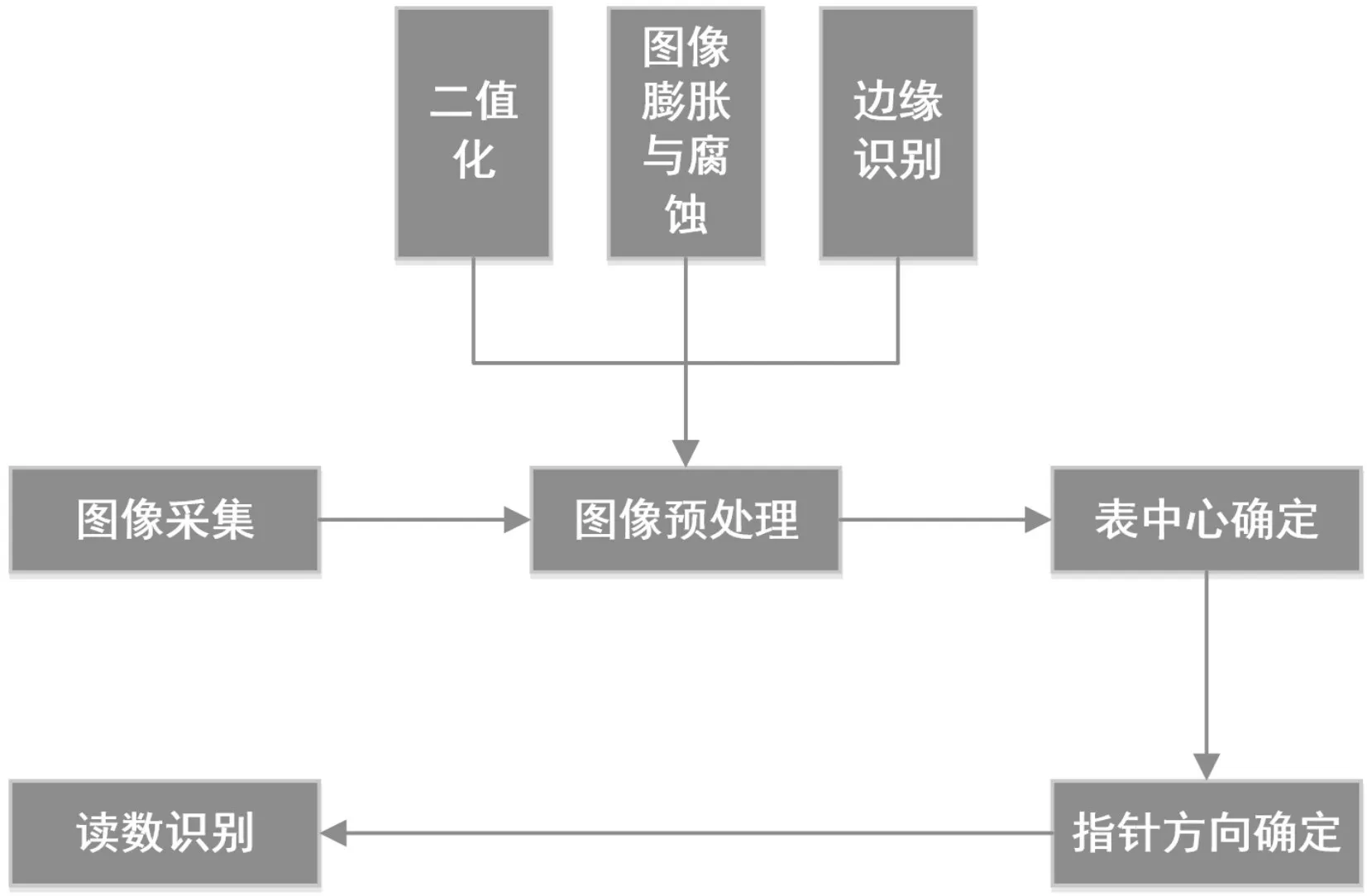
图1 机器识别算法流程
4.1 图像预处理
通过手持式图像采集装置对变压器油位计进行图像采集,获取初始状态图像和指针偏置图像分别如图2(a)和图3(a)所示。对图2(a)和图3(a)进行二值化处理,分别得到黑白化效果图如图2(b)和图3(b)所示。最后对图像进行膨胀、腐蚀处理和边缘处理,得到图2(c)和图3(c)。
4.2 指针中心定位
对图2 和图3 所示的指针图像进行提取,通过对两个指向不同的指针进行像素逻辑异或运算,得到只包含2 个指针的灰度图像,对两个指针进行图像处理,其重叠部分的交点就是表中心,如图4示。

图2 指针处于初始状态下的图像
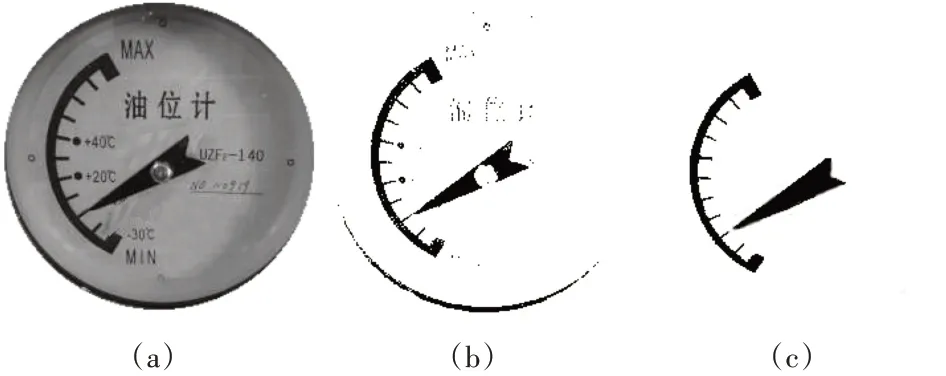
图3 指针处于偏置状态下的图像
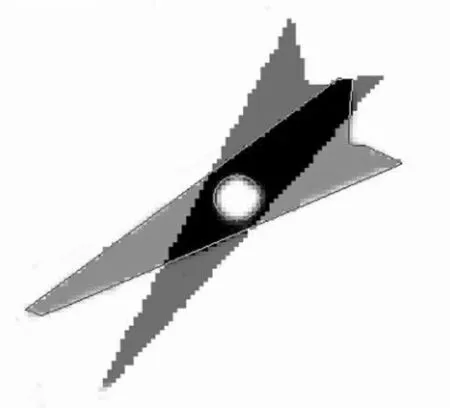
图4 表中心的定位
4.3 读数识别结果分析
实验分为8 组,每组中油位计的指针分别设置于不同位置,每组进行6 次机器识别,识别结果如

表1 所示。通过对实验数据进行分析,可以发现本文所提出的基于机器视觉的油位计识别技术与实际值平均误差为1.78%。
5 结语
本文通过对油位计的采集图像进行二值化处理得到油位计的黑白图像,基于膨胀腐蚀处理、边缘轮廓检测获得油位计的指针清晰图像,最后结合指针方向判定和指针中心定位完成指针式油位计读数的机器识别。将本文所提出的仪表机器识别方法应用于实际的油位计,并进行反复实验,通过对实验结果进行分析,证明了本文提出了基于机器视觉的仪表识别技术在对指针式油位计的识别平均相对误差为1.78%,具有良好的识别精确,具备推广应用的价值。
猜你喜欢
小学生学习指导·低年级(2021年6期)2021-09-10
软件学报(2020年6期)2020-09-23
中学生数理化(高中版.高考理化)(2020年2期)2020-04-21
电子技术与软件工程(2019年17期)2019-10-09
广东第二课堂·小学(2017年9期)2017-09-28
汽车维修技师(2017年9期)2017-02-04
汽车维修技师(2016年1期)2016-08-12
汽车维护与修理(2015年7期)2015-02-28
物理教学探讨(2014年2期)2014-05-22
软件工程(2014年3期)2014-03-15