
智能行车记录仪专利技术分析
2019-08-01 02:48喻婷
发明与创新·职业教育 2019年4期
关键词:专利分析
喻婷

摘 要:行车记录仪,通常是指记录车辆行驶途中影像及声音等相关资讯的仪器,智能行车记录仪则是将行车生活有关的各项数据有机地结合在一起,通过综合管理,让行车生活更舒适、安全、有效和省时的行车记录仪。本文利用中国专利检索系统,检索了智能行车记录仪技术领域的专利申请,从技术起源、发展趋势、国内外专利申请量、产出国、申请人等方面进行了分析,在上述统计分析的基础上,总结出智能行车记录仪技术的一些规律,梳理部分技术分支的发展路线,为进一步研究智能行车记录仪技术提供参考资料。
关键词:行车记录仪;车道偏移;疲劳驾驶;专利分析
一、智能行车记录仪简介
传统的行车记录仪只能记录车辆行驶过程中的音视频数据,随着车载数据及功能的不断增加,智能行车记录仪除了基本的音视频记录功能,还能够将行车生活有关的各项数据结合在一起,通过综合管理,让行车生活更舒适、安全、有效和省时。
根据智能行车记录仪的改进重点,智能行车记录仪技术可分为三个方向:(1)针对视频录制和存储技术:改进图像传感器和图像处理芯片,优化存储装置和存储方式,通过车辆状态信号、环境信号、用户指令等控制视频的录制或存储。(2)针对车辆与其他设备的数据交互:通过近程通信、局域网、移动互联网等数据传输渠道,实现车-人、车-车、车-服务器的数据交互。(3)针对行车数据的分析处理:获取车辆行驶数据、驾驶员数據并与行车记录仪拍摄的图像数据进行综合分析和处理,实现多种驾驶辅助功能。
二、智能行车记录仪专利技术整体分析
本文对智能行车记录仪技术领域的专利申请趋势、专利申请产出国和全球申请人分布进行了统计分析。根据数据库收集的文献量及分布特点对中文和外文数据库进行选择,其中中文数据库选择CNABS数据库,外文数据库选择VEN数据库。
(一)专利申请量趋势分析
在中文摘要数据库CNABS和英文摘要数据库VEN中分别对智能行车记录仪技术相关专利文献进行检索并统计,得到如图1所示的专利申请趋势图。
1995年至1999年,行车记录仪技术处于萌芽期,由于受到传感器、处理器等硬件方面和图像处理算法等软件方面的限制,技术发展缓慢,专利申请量整体较少; 2000年至2008年,得益于图像传感器和图像处理算法的发展,行车记录仪采集的图像质量与图像处理能力都得到了提升,同时随着各种传感器小型化和集成化,汽车数据传输技术的不断发展,在行车记录仪中配置多种行车数据相关的传感器或与汽车总线进行数据传输变得容易实现,车辆驾驶辅助技术也在快速发展,带动各类车载电子设备的功能改进,智能行车记录仪技术得到稳定的发展,专利申请量呈现逐年上升的态势;在2009年出现了转折,该年全球专利申请量较去年下降了8.6%, 并于2010年开始回升,而国内申请量则持续保持上升的态势,主要因为2007年全球经济逐渐出现不景气现象,对该领域也带来了冲击,由于该技术国外发展得比中国早,在2006年智能行车记录仪刚开始在国内发展,受经济的影响较小; 2010年至2015年,随着移动网络通信的发展、汽车市场的不断扩张、自动驾驶技术的发展、智能终端的普及,人们需求智能化、多功能化、操作简单、娱乐性强的行车记录仪,因此智能行车记录仪朝多个方向同时发展,专利申请量持续快速上升,在2015-2016年,国内外专利申请量激增,主要原因是4G网络技术的普及和人工智能的兴起,一些社会热点事件提升了人们对行车记录仪的关注;2017年和2018年由于部分文献还未公开,导致目前的统计得到的申请量不多。
(二)专利申请产出国分析
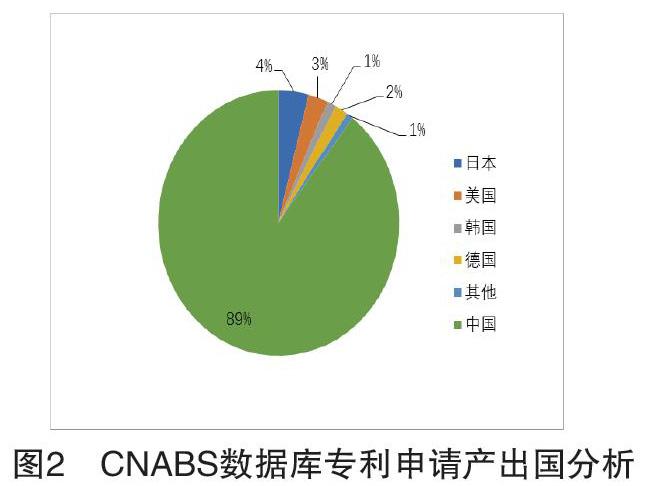
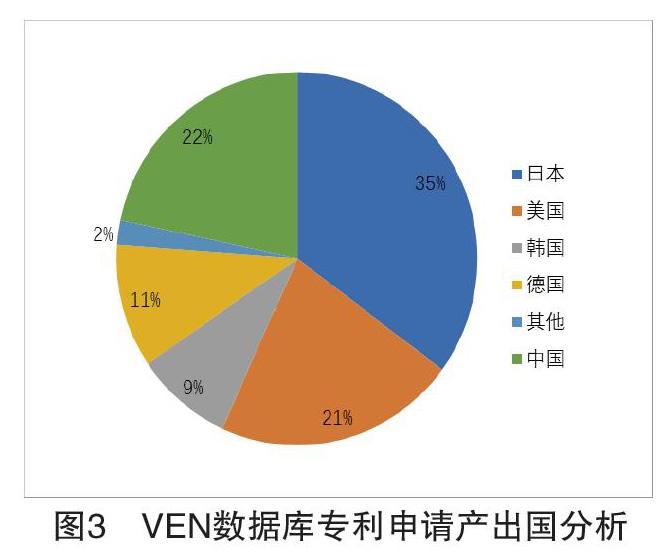
专利申请产出国一般是指一项技术的原创技术国,一般而言,一个国家拥有的原创技术越多,说明其在该技术领域的研发能力和技术实力越强。图2和图3分别是CNABS数据库和VEN数据库中相关检索结果的专利文献产出国进行的统计分析结果。
CNABS库中排名靠前的国家和地区依次为中国、日本和美国,VEN库中排名靠前的国家和地区依次为日本、中国和美国。其中,中国在该领域的国外专利申请量占比虽然不少,但是与在CNABS库中占比极高的情况相比,我国申请人在国外申请专利的数量并不多,表明我国申请人应更加重视对于该领域国外的专利布局,需要进一步加强在国外进行相关专利的申请。
(三)专利申请人分布
进一步对CNABS和VEN数据库中智能行车记录仪技术领域中申请人进行排名和分析,具体分布图如图4、图5所示。
全球范围内智能行车记录仪技术专利的重要申请人主要分布于日本、韩国、德国和美国。我国申请人在全球范围内的申请量排名靠后,这与行车记录仪进入我国市场的时间较晚有关,早期核心技术都掌握在外国公司手中,使我国申请人在国外进行专利布局的难度较大。结合图3可知,我国的申请量并不少,但是重要申请人的申请量却不多,这也反映了在该领域我国的申请多而不精的特点。
从图5可以看出,在国外该领域处于领先地位的公司在中国进行了一定的专利布局,并且国外公司的申请量比我国申请人的申请量更多。国外的重要申请人主要是汽车(零配件)公司、导航公司、互联网公司,对上述几个公司在该领域的专利进行分析,发现导航公司提交的申请主要与车辆行驶路径相关,如路径规划与导航、历史路线回放、实景地图绘制等;互联网公司提交的申请主要与行车记录仪视频录制和管理相关,如视频录制的控制方式、视频数据传输方式、视频数据的处理方式,而汽车公司则更重视车辆行驶数据的采集与处理。
三、智能行车记录仪技术路线梳理
(一)智能行车记录仪技术分支
智能行车记录仪技术可以分为三个大的方向:一是针对视频录制和存储技术的改进,二是针对车辆与其他设备进行数据交互的改进,三是针对车辆行车数据的分析处理的改进。其中,针对车辆行车数据的分析处理主要包含:车道偏离检测预警技术、前车碰撞检测预警技术、疲劳驾驶检测预警技术、倒车辅助技术等。近年来,随着人工智能的兴起,自动驾驶技术成为众多研发人员的研究重点,而自动驾驶技术离不开对车辆驾驶辅助技术,在各类车辆驾驶辅助技术中,车道偏离检测预警技术和疲劳驾驶检测预警技术以其能够有效减少驾驶员的危险驾驶,提升行车安全的特点受到人们的关注,也成为智能行车记录仪领域的研究热点。
结合上述技术发展方向和发展热点,本文主要对智能行车记录仪中车道偏离检测预警技术路线和疲劳驾驶检测预警技术进行梳理,通过整理该技术分支从1995年至2017的专利申请,并对其该领域的重点专利申请进行分析,根据相关重点专利申请梳理技术发展路线。
(二)智能行车记录仪中车道偏离检测预警技术
首先,对车道偏离检测预警技术进行梳理,该技术的发展趋势是结合更多车辆行驶相关的数据进行更加准确及时的判断,并辅助其他系统实现自动驾驶。通过梳理车道偏离检测预警技术专利申请,发现该领域中的热点问题主要集中在两方面:一方面,车道偏离的准确识别,主要通过提升图像处理算法剔除影响车道偏离判断的信息,并结合其他车辆数据,如车速、偏转角、GPS定位信息来进行车道偏离的检测;另一方面,检测出车道偏离后的预警操作,主要通过结合车辆行驶数据、环境数据等信息判断适合车辆的辅助控制操作。
下面对从1995年至2017的重点专利申请进行分析:
第一阶段(1995-2000):在这一阶段,受限于当时图像采集和处理技术,只能利用較简单的图像处理技术得到车辆与车道上标记线之间的距离,当车道附近存在障碍物或车道不是直线时,容易发生误判。代表性的专利有申请号DE59607148A(1995年):通过车辆后视镜中的红外发射器和CCD阵列,计算车辆一侧与车道白线间的距离。申请号KR19990008036A(1999年):摄像机采集车辆前方的车道图像,利用图像处理算法提取类似车道的直线并进行车道宽度计算。
第二阶段(2001-2008):在这一阶段,得益于各类检测传感器和车辆数据处理算法的发展,车辆偏移检测预警不再是单纯地检测出车辆偏移后进行提醒,而是根据车辆行驶数据以及车辆相对车道的关系判断是否存在车辆偏移的趋势,并进行对应的辅助控制,图像处理算法的改进则在于从图像中计算车道的相关信息。代表性的专利有:申请号JP2003372852A(2003年),通过图像得到车道参数,结合车辆行驶状况判断车道偏移趋势并进行偏移修正。申请号US20030373150A(2003年),通过前后两个摄像机拍摄的图像确定车辆距车道边界的距离。申请号JP2004163405A(2004年),根据巡航控制装置的工作状态和车速,在有偏离车道趋势时判断车辆是否需要开启车道偏离报警装置或车道报纸装置。申请号JP2008181869A(2008年),通过照相机识别车道边界检测车辆前方障碍物,并根据障碍物的大小得到虚拟车道宽度,判断是否需要进行回避操作。
第三阶段(2009-2017):在这一阶段,图像采集传感器和图像处理算法都得到了极大的改进,能够从复杂的动态的外部环境中筛选出有助于确定车道类型和位置的信息,使得车道检测的速度和准确率大幅提高,对车辆进行的辅助控制能够适应更复杂的情况。代表性的专利有:申请号DE102009007342A(2009年),利用连续照片序列确定前方行驶车辆的位置,以便获取有效车道。申请号JP2010544108A(2009年),车辆偏移时结合并行车辆的行驶状态调整角度修正值。申请号US20100308497P(2010年),通过环境图像,检测公路标线和/或尾灯,确定车道线类型并计算车辆与车道线的偏离。申请号US20100840058A(2010年),使用前、后视摄像机图像、数字地图和前方车辆相对偏移计算使本车辆不偏移的转角。申请号JP2011037669A(2011年),针对已检测出的车道划分线推测未检测出的另一侧的划分线。申请号KR20120073429A(2012年),根据不同天气进行不同的噪声处理,去除噪声后识别车道线并判断是否偏离车道。申请号JP2014073027A(2014年),根据一组立体图像拟合车道线,并根据车辆行驶数据判断需要选择的辅助控制模式。
(三)智能行车记录仪中疲劳驾驶检测预警技术
对疲劳驾驶检测预警技术进行梳理,该技术的发展趋势是将疲劳驾驶检测预警与人工智能、车辆驾驶辅助技术结合,全方面保障行车安全。通过梳理疲劳驾驶检测预警技术专利申请,发现该领域中的热点问题主要集中在两方面:一是疲劳驾驶检测方式的多元化;二是将疲劳驾驶检测预警技术与其他车辆行驶控制技术结合。
第一阶段(1995-2004),在这一阶段,对驾驶员疲劳驾驶检测的手段虽然有多种,但是都只利用了单一种类的参数进行疲劳驾驶检测,并且检测的算法都很简单。代表性的专利有:申请号US19990334960A(1999年),通过驾驶员脸部图像,确定驾驶员眼睛的纵向宽度,计算瞌睡因子并判断驾驶员是否在打瞌睡。申请号JP2002198776A(2002年),实时检测车辆速度,在预定时间内有预定监视速度减速了预定速度以上时判断为瞌睡状态并对驾驶者发出警告。申请号JP2003149630A(2003年),检测心跳信号,获取心跳信号的谱信号,通过使用谱信号的峰频率估计驾驶员清醒状态峰频率并计算表示驾驶员困倦程度的评估参数。
第二阶段(2005-2010):在这一阶段,随着图像处理技术的发展,对驾驶者眼睛的检测算法变得更加丰富,并且将车辆行驶数据与图像识别数据结合,提高了疲劳驾驶检测的可靠性。代表性的专利有:申请号JP2006051189A(2006年),使用由车载照相机拍摄的图像来检测驾驶员的面部位置改变,检测车辆的行驶状态,基于脸部位置改变和车辆的驾驶状态来确定驾驶员是否入睡。申请号JP2007152076A(2007年),根据多个差值图像去掉图像中的干扰光影响,使图像ECU能够辨别车辆外部的环境,判断驾驶者缩小眼睛是否由困倦引起。申请号JP2009068281A(2009年),提取眼睑开度的时序数据,求出眨眼间隔,检测频发性眨眼,从而判定困倦状态。
第三阶段(2011-2017):在这一阶段,利用更多类型的参数通过更加复杂的算法共同判定驾驶员的疲劳状态,提高了疲劳驾驶检测算法的适应性,随着车辆驾驶辅助技术的发展,车辆行驶数据、驾驶员生理状态数据、环境数据等与车辆驾驶息息相关的信息都被纳入车辆驾驶辅助系统的分析处理范围,因而疲劳驾驶检测技术逐渐与车辆驾驶辅助技术结合。代表性的专利有:申请号CN201210235887(2012年),获取驾驶时长、季节信息、压线频率、道路类型、方向盘操作数据、油门控制数据并与预先存储的防疲劳驾驶模型对比判断驾驶员是否处于疲劳状态。申请号JP2014526769A(2013年),基于驾驶员的身体信息和车辆的速度,检测稳定值收敛变化度,推定驾驶者的疲劳度。申请号JP2009068281A(2015年),检测车辆周围环境并定义目标行为,当检测到驾驶员打瞌睡时,启用驾驶员辅助功能。申请号CN201610186487(2016年),将采集的车道线信息和方向盘转角信息进行分析处理,与基础疲劳指数进行对比,获取初始匹配疲劳指数,分析处理驾驶员身份信息和驾驶时间信息得到修正系数,进而计算出驾驶员的实际疲劳系数,并在疲劳系数达到预设值时进行提示。
四、总结
通过了解和分析智能行车记录仪总体发展历程、专利申请状况、部分技术分支发展路线,可以看出智能行车记录仪的发展与硬件设备、软件算法、用户需求等息息相关,随着科技的发展,行车记录仪日后必将集成更多智能模块或与其他设备组合为方便用户使用、提升行车安全的智能车载系统。
参考文献
[1] 刘宽.基于ARM的在智能行车记录仪的研制[D].安徽理工大学,2017.
[2] 阮天波.基于移动智能终端的行车监控系统研究与实现[D].浙江工商大学,2015.
[3] 易琨.智能行车记录仪的功能、原理及使用[J].汽车科技,2017(3):18-24.
猜你喜欢
中国新技术新产品(2016年24期)2017-02-05
重庆大学学报(社会科学版)(2016年6期)2017-01-19
合作经济与科技(2017年2期)2017-01-03
科教导刊·电子版(2016年23期)2016-10-31
商(2016年29期)2016-10-29
科教导刊·电子版(2016年20期)2016-10-20
科技视界(2016年24期)2016-10-11
科教导刊·电子版(2016年6期)2016-04-19
求知导刊(2016年1期)2016-02-18
无线互联科技(2015年3期)2015-04-13
