多功能爬楼运载机设计*
2019-08-12 05:53焦正军何东杨强李媛黎昊喆
科技与创新 2019年13期
焦正军,何东,杨强,李媛,黎昊喆
多功能爬楼运载机设计*
焦正军,何东,杨强,李媛,黎昊喆
(武汉华夏理工学院 汽车工程学院,湖北 武汉 430223)
设计了一种多功能爬楼运载机,该运载机由动力驱动,通过机电结合实现货物运输装置的功能。通过对现有楼层间运输工具的调查研究,并结合人们运输方面的需求,融入了便捷、安全等的创新设计理念,设计出了适合于楼层间运输货物的高性能产品——多功能爬楼运载机。
楼层攀爬;货物运载;多功能爬楼运载机;救援
1 前言
经调查研究发现,一些城市在七八层以下无电梯或不能使用电梯,小型货物的运输需通过人工或楼道内的小型货物搬运小车运送。然而,即使在有电梯的情况下,受电梯空间限制,一些超重、超宽或超长(比如:冰箱、大板桌或窗帘杆)等特殊货物依然无法搬运,基本靠人力完成。因此,需设计一款运载机来实现特殊货物的爬楼运输。
中国学者对于楼层运输方面有一些研究,也涌现出了一些机械化运输装置。徐明宇等通过电力驱动机构实现运货上楼的目的,在一定程度上提高了搬运效率并节省了人力成本,但是机器结构简单,需要在人力辅助情况下完成货物运载,并且在狭小的楼道,因转弯困难,将无法搬运,而且安全系数较低,由于存在的这些现状,未能完全解决人力搬运、全自动化问题[1];董淑婧等设计了一种四杆机构式电动载物爬楼机,利用四杆机构的特性进行周期循环运动从而实现爬升越障的功能,这种方式虽然可以在楼梯间爬行运输,但是其运输效率相对较低[2];胡金祥利用两框架的交替升降达到爬楼梯的目的,虽然此装置可以保持无倾角的移动和制造成本低,但其不可运输大型货物[3];黄先琪利用平行四边形的变形特点,采用单片机控制整个系统的行走、转向等工作,从而研制出楼道、墙面自动吸尘器的自动运输装置,但是,该装置只限于小型作业,不能实现大货物运输[4]。
鉴于楼内运输空间不足、楼道转角难、大件货物搬运无法实现等问题,设计一款多功能运载机,以实现楼层攀爬和货物运载等功能。此款运载机需具有楼层攀爬、货物运载、火灾救援等功能。设计之初,需根据运载条件选择动力源,完成动力装置的设计;为完成楼层攀爬,需要设计爬升机构及吸附装置[5],使运载机能爬升并按需停留在指定楼层;为保证货物正常运输,防止货物的晃动引起坠落事故,需设计夹紧机构,以保护机器及货物。
2 多功能爬楼运载机的结构与工作原理
2.1 总体设计实现功能
此款运载机需实现楼层攀爬、货物运载、火灾救援等功能。设计之初,需根据运载条件选择动力源,完成动力装置的设计;为完成楼层攀爬任务,需要设计爬升机构及吸附装置,使运载机能爬升并按需停留在指定楼层;为保证货物正常运输,防止货物的晃动引起坠落事故,需设计夹紧机构,以保护机器及货物,整体结构如图1所示。
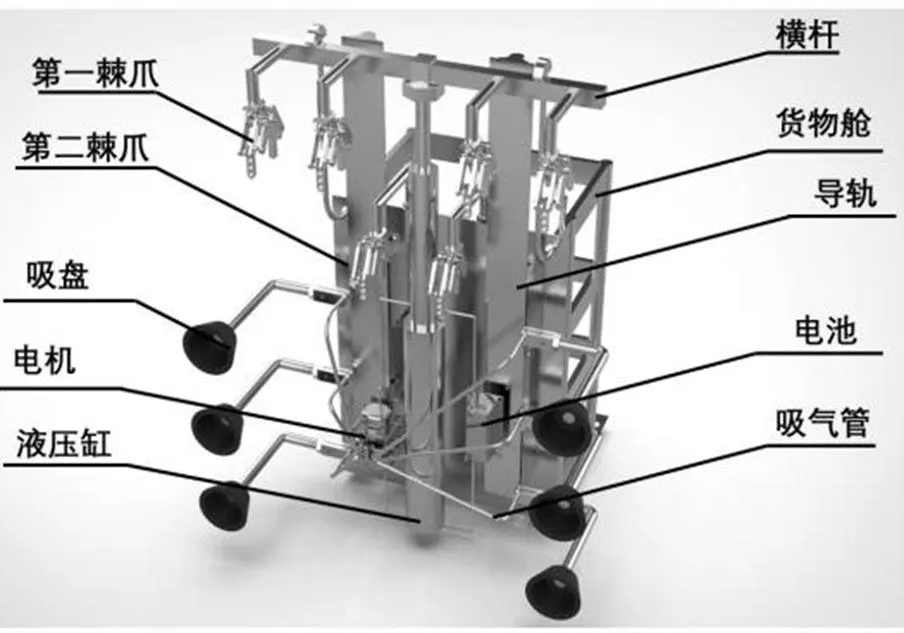
图1 整体结构
2.2 工作原理
2.2.1 货物夹紧
使用时,由人将该运载机送到楼层底部,待到达楼层底部时,将所要运送的物品放置货物舱内,拉开弹簧夹紧机构,将货物放进去,使其夹紧,待夹紧完毕时进行伸缩固定,通过两次固定进而将物品牢牢固定在货物舱内。
2.2.2 爬升装置
打开吸尘器,此时吸盘牢牢吸住墙体(前提是楼层表面光滑,并且楼层表面有阳台,吸尘器吸附时间为40 s,将墙体牢牢吸住),吸盘通过中空杆和管道与吸尘器的进气口接通,并与墙体接触,电池为吸尘器供电,吸尘器工作进行抽吸,使吸盘内产生负气压,将墙体吸牢,吸盘主要用于运载机在爬楼过程中保持平衡。待吸附完毕时,伸缩式液压缸开始工作,此时活塞杆上升;待水平横杆到达指定位置时,第二棘爪开始工作;由PLC控制器控制第二棘爪到阳台边缘,待紧抓阳台之后,由伸缩式液压缸控制活塞杆回缩,使爬楼立板向上运动,此时支撑板将货物舱提升到二楼。
2.2.3 悬停装置
待货物舱到达二楼时,由货物舱立板上的第一棘爪紧抓阳台,目的是与第二棘爪共同拉住货物并达到一定的安全性;待稳定时,PLC控制器[6]自动断开吸尘器与电池的电性连接,活塞杆收起完毕。该运载机到达二楼时,再次启动吸尘器使吸盘吸附墙体,然后重复以上操作进行爬楼运货(下楼的工作原理与上楼相同)。
棘爪可有效将阳台抓住,是主要的受力原件。其中在伸缩式液压缸的活塞杆顶部通过连接座连接水平横杆,其前部通过第二连接杆并安装了四个第二棘爪,在货物舱立板的上端两侧通过第一连接杆安装了两个第一棘爪,使货物安全到达目的地,如图2所示。以上楼层机构往复运动,循环交替,实现运送货物上楼的目的。

图2 运货上楼
3 总体设计方案
3.1 楼层承载参数的确定
在运载机设计之初,需确定货物及所爬楼房的承载参数,以保证运载过程中满足强度及刚度要求。
目前居民房屋的结构种类主要有钢结构、钢和钢筋混凝土结构、钢筋混凝土结构、混合结构、砖结构五类。在众多的居民房屋结构中,民用住宅使用最普遍的是钢和钢筋混凝土结构、钢筋混凝土结构。在普通民用住宅混凝土结构楼房中,楼板、阳台边沿所能承受的最大压力如表1所示,为保证运载过程运载机及楼房结构的安全,取阳台额定载荷为400 kg,楼板额定载荷为250 kg。
表1 阳台、窗户等边沿所能承受的最大压力(单位:kg)
普通混凝土楼房楼板承重250~300 阳台承重400~500 窗户承重400~500
3.2 货物参数的确定
特殊货物的参数如表2所示。
表2 特殊货物的参数
质量特征形状特征举例长/m宽/m高/m质量/kg 超重—冰箱、洗衣机等6.2~6.35.5~5.71.6~1.790~100 —超宽大板桌、门窗、书架等1.0~1.33.5~4.51.5~1.840~80 —超长沙发等1.0~1.26.0~8.03.5~4.060~90
考虑到所要设计的运载机的主要功能是楼层攀爬和货物运载,为保证运载机的强度和刚度要求,需确定所运载货物的额定质量和尺寸范围等参数,尤其是超长、超宽、超重等特殊货物的参数,用于后续的动力装置和爬升机构的设计。经调研,特殊货物主要有超重的冰箱(如海尔BCD-206STPA)、洗衣机,超宽的大板桌、门窗,超长的窗帘杆、沙发等。
4 多功能爬楼运载机的设计与计算
4.1 货物舱结构设计
该设计采用的是栅栏式,可以有效地限制货物的移动,还可满足运载机的刚度需求。综合考虑特殊货物的尺寸及阳台和窗户的尺寸,确定了货物舱的形状尺寸,其长、宽、高分别为1.5 m、1.8 m、2.0 m,为保证货物舱的强度,选用材料型号为60Ti。普通民用住宅阳台及窗户尺寸如表3所示。
表3 普通民用住宅阳台及窗户尺寸(单位:m)
普通窗户客厅窗户中等卧室窗户大卧室窗户卫生间窗户 1.5×0.91.5×1.8~1.8×2.11.2×1.5~1.5×1.81.5×1.8~1.8×2.10.6×0.9~0.9×1.4 阳台尺寸阳台尺寸阳台尺寸阳台尺寸阳台尺寸 1.5×1.51.5×1.81.8×1.81.8×2.11.8×2.4
4.2 动力装置设计
该机器自重和货物的质量之和应不超过400 kg。采用电池供电,由电池、电机等构成。在工作的时候启动电源开关,电池供电,电机将电能转化为机械能,从而输出动能,带动运载机工作。根据表1和表2的参数,通过计算选择电池与电机的型号。
已知运载质量为400 kg,电能利用率为80%,容量为97 200 mAh,一次运行爬升高度为3.2 m,则由机械守恒定理可知:电=gΔ×80%=400×9.8×3.2×80%=10 035.2 W=10.035 kW,电动机功率电==,额定电流,有效工作时间,电机扭力常数,电机扭力电=,电机消耗电流值,电机机械输出功率,每分钟转速,电机效率,电机发挥最高效率的电流值。
4.3 爬升机构的设计
在爬楼运输过程中,需依附于楼房墙体及阳台,因此需设计吸附装置。吸附装置主要由吸盘、吸尘器等组成。启动电源时,吸尘器工作,将吸盘内气体抽出从而产生负气压,使其牢牢吸住墙体表面,如图3所示。
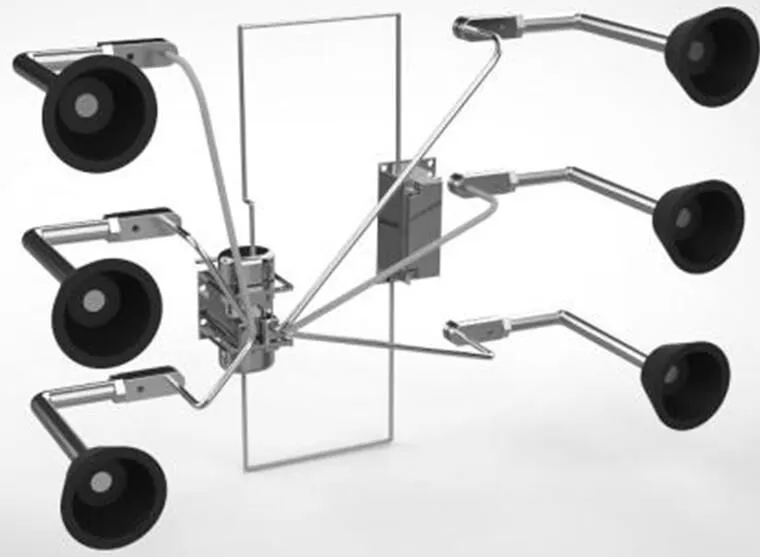
图3 吸附装置
为能在楼外上下运输,还需设计爬升机构。爬升机构主要由液压缸、电机、电池、横杆、棘爪等组成。待吸附完毕之后,电机工作,通过吸尘器来推动液压活塞杆,使其上升。此时,活塞杆顶端与横杆相连接,棘爪(第一棘爪)与横杆连接,从而实现爬楼过程,如图4所示。
待第一棘爪抓紧阳台后,此时,与横杆相链接的链传动装置工作,将货物舱提升至第一棘爪所抓的楼层。待提升完成后,由货物舱上的第二棘爪开始抓紧阳台,达到悬停的目的。待悬停稳定后,吸尘机断开,吸盘脱离墙体,此时液压缸收起。待收起完毕之后,吸尘机工作,吸盘继续吸附墙体,液压缸升起,完成下一楼层的爬升。悬停的目的是便于运送员从阳台取下货物。吸尘器、吸盘以及链传动装置为购买件,液压缸与棘爪为自制件。
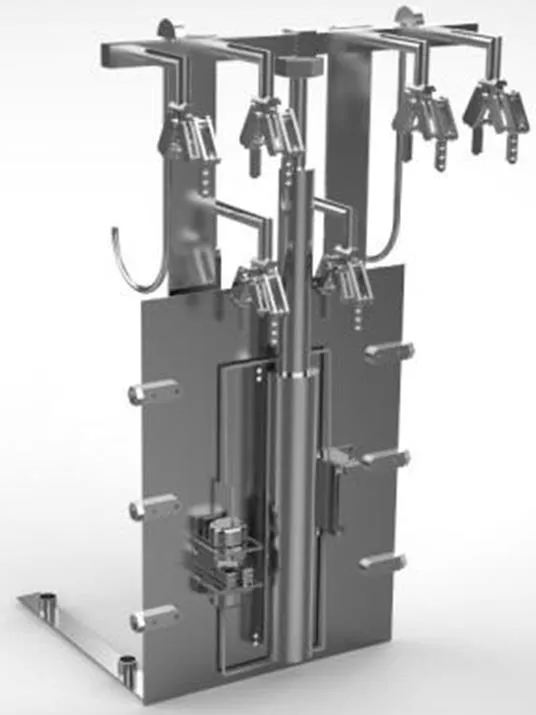
图4 爬升机构

图5 棘爪
为了达到绝对的安全,棘爪所能承受的力的理论值为实际值的两倍,经计算得到,理=0.5 m2,所以第二棘爪安装两个棘爪,即可达到第一棘爪的效果(本棘爪设计以理论值为主)。
4.4 固定保护装置的设计
在装置运输货物的过程中,考虑到运载货物本身大小、形状等因素,为防止运载机晃动造成货物的损坏或货物坠落造成人员伤亡,在设计过程中需加入固定保护装置。固定保护装置由夹紧装置和二次保护装置组成,其中夹紧装置主要由两根弹簧和一块挡板组成。对超重型货物和超款型货物,通过夹紧装置一次固定;而对于超长型货物则需要在夹紧装置一次保护的前提下,用绳索进行二次保护。
在设计时需确定夹紧装置的规格,已知选取弹簧劲度系数为1 000 N/m,原长为0.2 m两弹簧并联,则并联后的劲
5 结论
该装置将智能化与机械化器材相结合,充分地发挥了智能优势,从开始工作到爬楼过程中实现无人工操作,由传感器自动控制,将货物运送到指定地点,实现了人工智能。并且利用该装置运输货物的方案,其相对传统的运输方法,大大节省了人力,达到高效作业、方便快捷的特点。该运载机也可以实现货物的楼层运输以及电梯失效、楼内失火等情况下的紧急救援工作。
[1]徐明宇,赵勇,包士维,等.电动载物爬楼机的开发设计[J].机械工程师,2015(7):198.
[2]董淑婧,程瑞.一种四杆机构式电动载物爬楼机[J].机械制造与自动化,2017(5):167-168,173.
[3]胡金祥.自动爬楼梯机:中国,CN201220461345.3[P].2012-09-11.
[4]黄先琪.一种新型的爬楼梯机器人[J].机械,2009,36(5):75-76.
[5]王淑坤,孟晓东,尚鸿鹏.一种轮履组合式爬楼轮椅的设计[J].机械传动,2013(10):156-159.
[6]赵宸,陈殿生.双足机器人NAO爬楼步态规划[J].机器人技术与应用,2013(4):31-36.
TH122
A
10.15913/j.cnki.kjycx.2019.13.013
2095-6835(2019)13-0031-03
焦正军,武汉华夏理工学院汽车工程学院车辆工程2017级学生。何东,武汉华夏理工学院汽车工程学院车辆工程2017级学生。杨强,武汉华夏理工学院汽车工程学院车辆工程2017级学生。李媛,女,硕士,武汉华夏理工学院汽车工程学院副教授,主要研究方向为汽车CAD/CAE。黎昊喆,武汉华夏理工学院汽车工程学院车辆工程2017级学生。
校级质量工程项目“3D设计创新创业团队指导教师团队”(编号:2017103)
〔编辑:严丽琴〕
猜你喜欢
中学生博览·文艺憩(2022年4期)2022-06-21
散文诗世界(2021年12期)2021-12-17
作文与考试·小学高年级版(2020年17期)2020-10-09
学生天地(2020年23期)2020-06-01
故事作文·低年级(2019年1期)2019-01-21
故事作文·低年级(2019年1期)2019-01-21
读者(2019年2期)2019-01-05
大众摄影(2018年7期)2018-07-05
青岛画报(2018年1期)2018-02-23
方圆(2017年24期)2018-01-17