
基于改进遗传算法的控制器性能优化
2019-08-13 08:09李世博朱晓明杨耀辉
成组技术与生产现代化 2019年1期
李世博,朱晓明,杨耀辉
(机械工业第六设计研究院有限公司 居住商业建筑院,河南 郑州 450007)
基于当前我国节能减排的大环境,许多发电企业在机组优化调整、提高机组经济性方面做出了努力.研究表明,在降低污染物排放的同时,系统的控制品质是影响机组经济性以及机组优化水平的关键因素.瑞典科学家ASTROM关于控制器的调查表明,在工业工程领域,60%以上的PID控制器都存在一定缺陷[1].因此,发电行业甚至整个工业领域的控制器优化问题值得研究.蒋小维提出了一种将正交交叉算子用于种群初始化和交叉操作的改进算法,并将其应用在电动汽车有序充电控制策略中[2].谢勤岚等给出了基于遗传算法的PID控制器优化设计步骤,并在仿真实例上进行了单回路实际操作[3].上述研究只是对遗传算法中的部分操作进行改进,并未对其他操作进行改进,且缺少改进算法在复杂回路中有效应用的证明.
本文对遗传算法的选择算子、交叉算子、变异算子进行改进,从而得到收敛速度更快、收敛精度更高、稳定性更强的算法;通过改进遗传算法对锅炉水位串级三冲量控制系统的输出曲线进行对比,以验证改进遗传算法的可行性.
1 改进遗传算法
遗传算法是一种寻优搜索算法,结合了达尔文进化论和基因遗传学原理.寻找全局最优解时并不依赖初始化信息,这是遗传算法的独到之处.标准遗传算法是以目标适应度函数评价为标准,通过指导搜索优化状态参数来实现整体优化目的的.
1.1 选择算子的改进
在标准遗传算法中,遗传进化的初始阶段主要以轮盘赌方法筛选个体,对任意个体的选择概率都是一样的.这种选择方法增加了初始适应度较高个体被选择的可能性,从而丧失了种群的多样性.种群多样性的丧失,会增强算法的单调性,从而造成局部最优而非全局最有的结果.此外,随着种群进化的进行,种群中个体相似度的差别越来越小,而此时以轮盘赌方法选择种群中每个个体的几率仍然相等.这就意味着轮盘赌选择法是无效甚至存在误导性的.因此,针对种群进化初期的选择问题,可改进选择算子,以避免上述问题的出现.
计算群体中每个个体的适应度值,并将其按适应度值大小排序.可直接用适应度值高的1/4个体替换群体中适应度值低的1/4个体,并放入下一群体中;适应度值处于中等水平的1/2个体不作任何处理就放在下一种群中.这种方法在提高算法收敛速度的同时保证了种群中个体的数量.
1.2 交叉算子的改进
在基因的交叉互换过程中,标准遗传算法的交叉概率是常数.这种忽略个体间相似度的交互过程往往会破坏父代群体的优秀基因,而父代优秀基因的破坏会导致算法收敛速度降低甚至不能收敛或局部收敛的情况出现.为了解决这种常数型交叉概率导致不能有效收敛的问题,在此引入相似度.相似度的定义如下:
假设两个二进制编码的父代个体为X和Y,则可定义:
相似度S=c/n,S=[0,1].
式中:S为父代个体的相似度;c为个体X和Y的最长共同子串的长度;n为种群中染色体编码的长度[4].
相似度能够更直观地反映个体之间的差异.为了明确这种差异是否需要进行交叉互换,可引入交叉临界值.交叉临界值为:

(1)
式中:g为种群的进化代数;G为种群进化总代数[5-6].
由式(1)可知,随着种群的进化,交叉临界值逐渐增大.个体间交叉互换的规则如下:相似度大于当前种群进化交叉临界值的个体,不允许进行交叉互换操作;而相似度不大于当前种群进化交叉临界值的个体则进行交叉互换操作.个体之间的相似度和种群进化的当前交叉临界值,在种群进化的起步阶段均较小.随着种群进化代数g的增大,在个体之间相似度逐渐增大的同时,交叉临界值变得更大,这就保证了进化的平稳进行.
1.3 变异算子的改进
变异概率在遗传进化中往往是一个很小的常数.随着种群进化的推进,种群的平均适应度值逐步接近最优个体适应度值,个体两两相似度逐渐增大.变异概率是一个很小的常数,使得此时的遗传进化过程更像一个随机过程,导致种群进化速度放缓.针对上述问题,可对变异算子进行改进,使变异个体的变异概率为:

(2)
式中:pm_max取值0.2,作为个体最大变异概率;pm_min取值0.001,作为个体最小变异概率;favg为每代种群适应度的平均值;f为将要变异个体的适应度值;fmax为种群中适应度值的最大值.
根据式(2)可知:在个体适应度值大于种群平均适应度值的前提下,适应度值低的个体变异概率大;变异概率的减小增加了高适应度个体被保留下来的可能性;在个体适应度值不大于种群平均适应度值的前提下,适应度值低的个体变异概率较大.这种做法改善了算法的局部搜索能力,增强了算法性能.
2 锅炉汽包水位串级三冲量控制系统
汽包水位串级三冲量控制系统由两个闭环回路和一个前馈部分组成(图1)[7].图1中W1、γW、αW、Gc2(s)、KZ、Kμ分别为给水流量、给水流量变送器比例系数、给水反馈系数、副回路控制函数、执行器参数、调节阀参数.这些参数的相应器件构成副回路(该回路采用响应速度快的比例控制方式).图1中GP(s)、γH、Gc1(s)分别为被控对象传递函数、水位测量系数、主控制器参数.这些参数的相应器件与副回路一起构成主回路(主回路系统采用比例积分控制方案,使回路在快速响应的基础上兼顾超调).图1中D、GP(s)、γD和αD分别为蒸汽流量信号、蒸汽流量传递系数、蒸汽流量变送器比例系数、蒸汽流量前馈装置系数.这些参数的相应器件组成前馈部分控制系统.前馈反馈信号的强弱由锅炉虚假水位的严重程度决定.
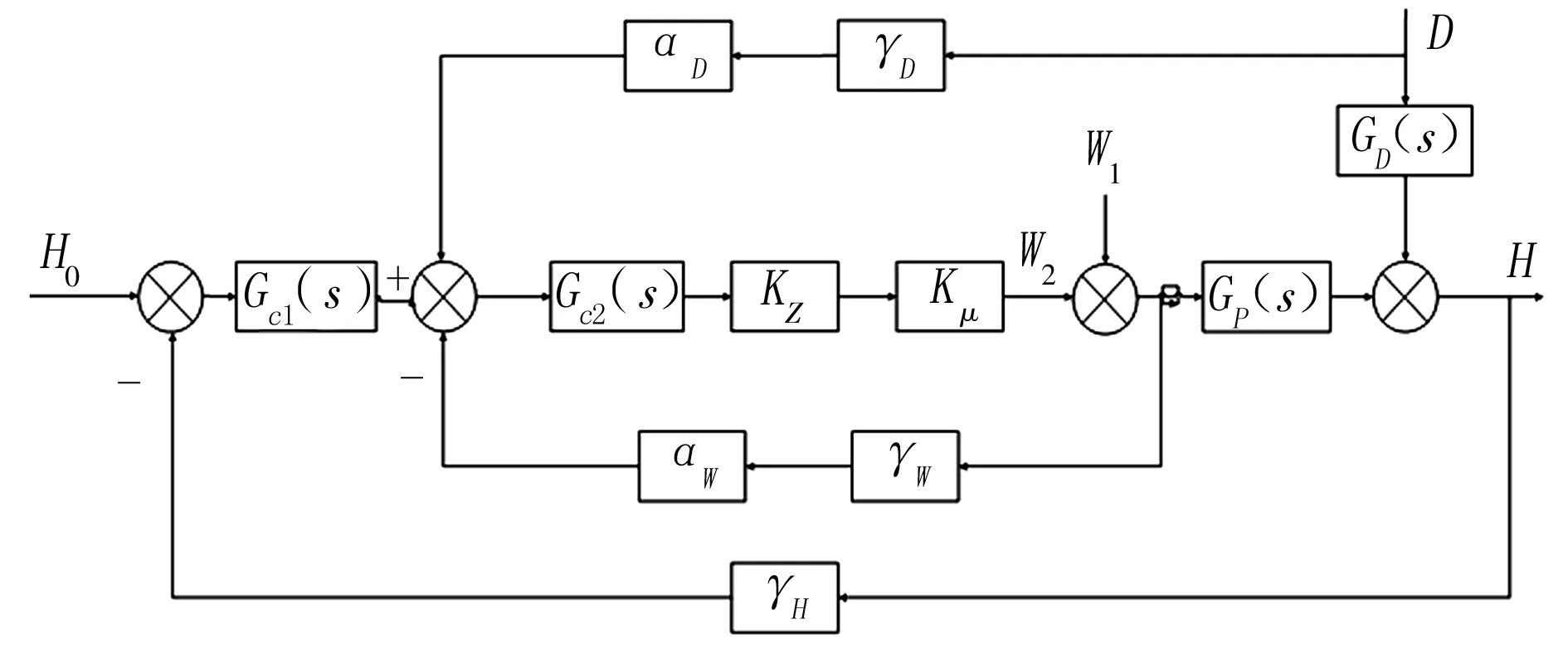
图1 汽包水位串级三冲量控制系统示意图
在控制仿真系统Matlab/Simulink 中搭建某电厂的汽包水位串级三冲量控制系统.对于该控制系统,可参考文献[8]设置如下相关参数:
(1) 给水流量控制对象传递函数为:
(3)
(2) 蒸汽流量扰动对象传递函数为:
(4)
(3) 几个系数取值如下:γW=γD=0.5;γH=1;
(4) 执行器参数和调节阀参数取值如下:KZ=Kμ=0.8;
(5) 蒸汽流量前馈装置系数和给水反馈系数取值如下:αD=0.6;αW=0.3;
(6) 主控制器控制参数取值如下:比例控制系数Kp=1.6,积分控制系数Ki=0.01,微分控制系数Kd=25;
3 控制系统优化及算法对比实验
3.1 目标函数的选取及优化
以权重绝对误差的变化值和跟踪误差变化值作为目标函数,即
J(i)=α|error(i)|+β|de(i)|
(5)
式中,error(i)、 de(i)分别为第k个采样时间第i个个体的位置跟踪误差、第i个个体的位置跟踪误差变化率.为了减小锅炉水位控制系统中控制性能受到的超调量影响,引入如下超调惩罚因子[9]:
If error(i)<0J(i)=J(i)+γ|error(i)|
(6)
式中γ>>α,β.
3.2 遗传算法对比实验
3.2.1 实验步骤
3.2.2 无扰动实验结果及分析
无扰动实验结果如图2所示。

图2 无扰动实验结果
由图2可看出,对应于改进遗传算法,控制系统的反应最快、上升时间最短、超调量最小、超调时间最短.其中:不做任何优化的参比曲线超调40.5%;标准遗传算法优化曲线超调17.4%;改进遗传算法曲线超调远远优于前两者,仅超调0.04%.
3.2.3 给水扰动实验结果及分析
在仿真实验进行到1 000 s时,加入10%的给水扰动,可得图3所示的给水扰动实验结果。为便于分析,可作出图4所示的给水扰动仿真曲线局部放大图。
根据图3和图4可算出:改进遗传算法优化曲线在给水扰动6 s后出现了约2%的最大超调,且能在短时间内迅速恢复稳定;参比法曲线在给水扰动129 s后出现了3.8%的最大超调;标准遗传算法优化曲线在给水扰动142 s后出现了2.6%的最大超调。分析可知,基于改进遗传算法的控制系统最大超调极其微小,且能在极短时间内恢复稳定。因此,采用改进遗传算法的系统控制性能优于参比法和标准遗传算法。

图3 给水扰动实验结果

图4 给水扰动仿真曲线的局部放大图
3.2.4 蒸汽扰动实验结果及分析
在仿真实验进行到1 000 s时,加入10%的蒸汽扰动,可得图5所示的蒸汽扰动实验结果。为便于分析,可作出图6所示的蒸汽扰动仿真曲线局部放大图。
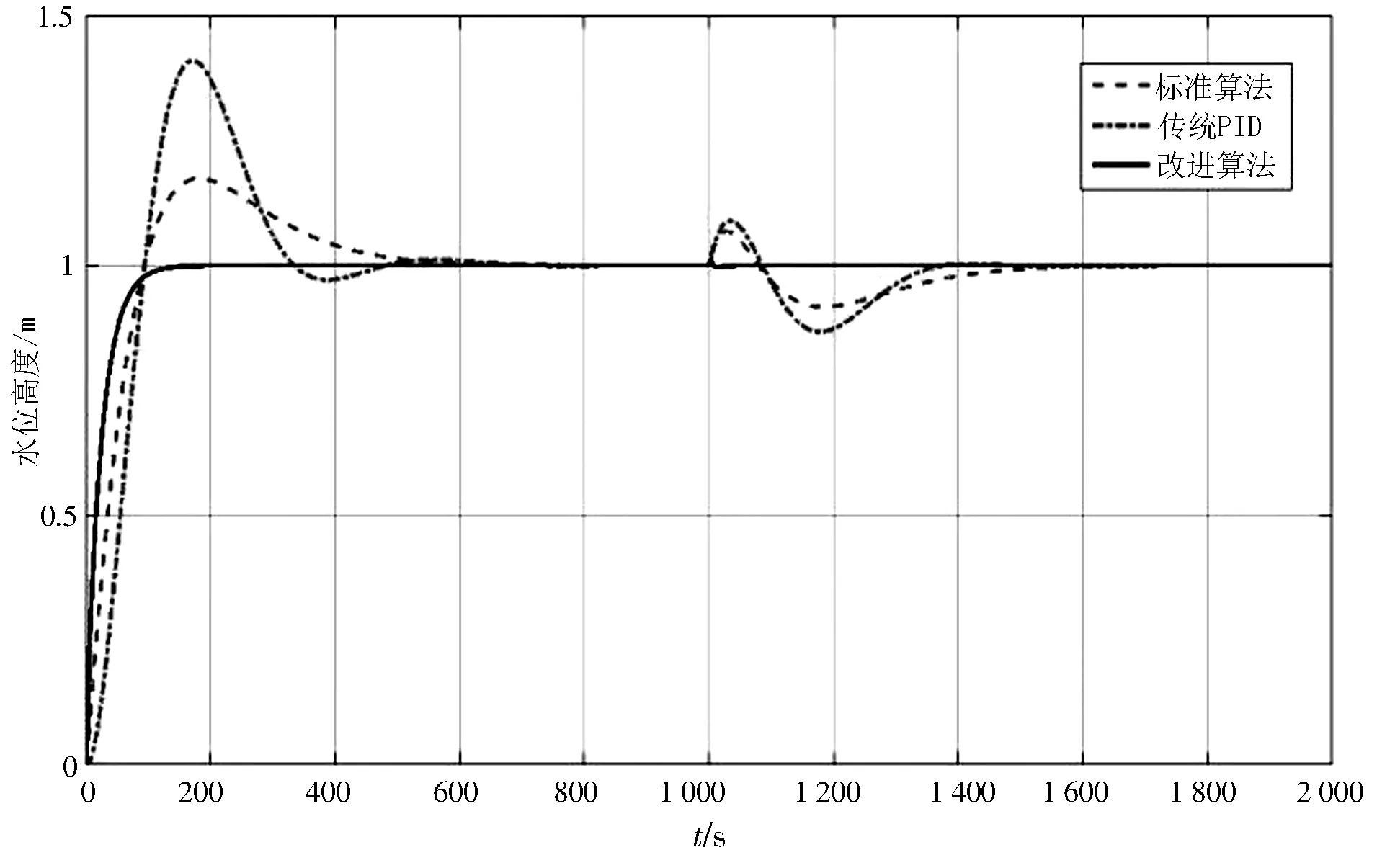
图5 蒸汽扰动实验结果
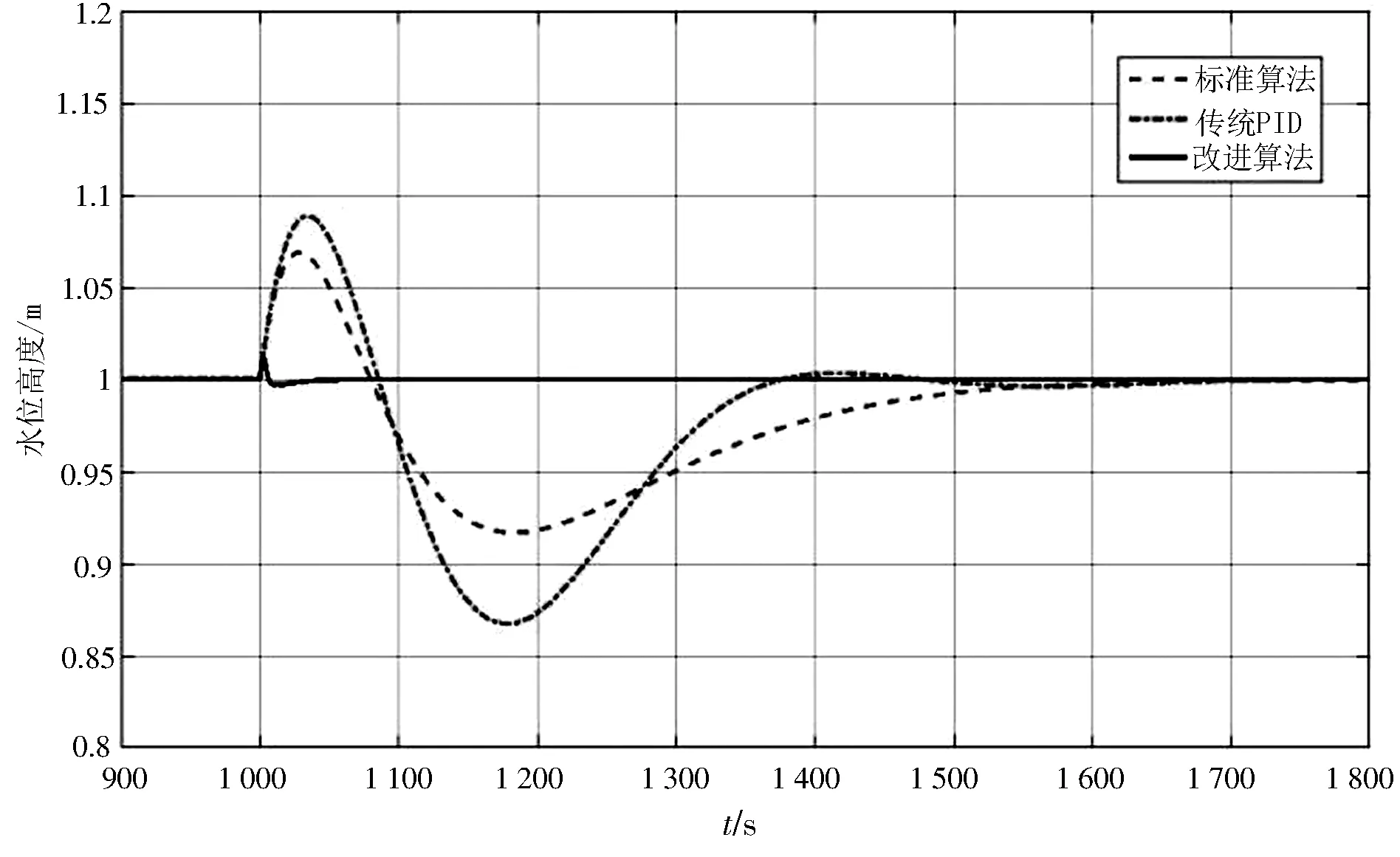
图6 蒸汽扰动仿真曲线的局部放大图
根据图5和图6可算出:改进遗传算法优化的控制方案在加入蒸汽扰动2 s后出现了约1%的最大超调并迅速恢复稳定;参比法曲线在加入蒸汽扰动36 s后出现了约9.3%的最大超调;标准遗传算法曲线在加入蒸汽扰动28 s后出现了约6.8%的最大超调.对于控制系统在出现超调后恢复稳定需要的时间来说,参比法和标准遗传算法远远长于改进遗传算法.分析可知:改进遗传算法的仿真曲线可近似看作理想扰动曲线,相应控制系统的控制性能优于参比法和标准遗传算法.这证明了改进遗传算法的有效性.
4 结束语
(1) 本文以稳定性、收敛性、收敛速度为基准,从遗传算法种群个体适应度值及其变化着手,分别对选择算子、变异算子、交叉算子进行了改进.
(2) 改进遗传算法无论在无扰动实验还是给水扰动、蒸汽扰动实验中,其响应曲线的滞后时间、上升时间、调节时间、超调量都明显优于参比法和标准遗传算法.
猜你喜欢
数学物理学报(2022年5期)2022-10-09
计算机仿真(2022年8期)2022-09-28
数学物理学报(2022年4期)2022-08-22
数学物理学报(2021年4期)2021-08-30
北京航空航天大学学报(2021年7期)2021-08-13
数学物理学报(2021年2期)2021-06-09
数学物理学报(2021年1期)2021-03-29
应用数学(2020年2期)2020-06-24
数学物理学报(2019年4期)2019-10-10
郑州大学学报(工学版)(2018年2期)2018-04-13
