
各类摄像头在L3级自动驾驶视觉感知中的应用
2019-08-27 00:40李建伟
汽车电器 2019年8期
李建伟
(曼德电子电器有限公司保定徐水电气系统分公司,河北 保定 071000)
1 概述
说起智能无人驾驶,其实就是汽车要具备开车人所具备的所有功能,甚至更高的感知能力。
提到感知,首先就是视觉感知,市面上无人驾驶的视觉感知技术大致可以分为单目摄像头、双目摄像头以及多目摄像头 (图1)。由于画质、像素、感光元件尺寸三者的关系,再加上移动处理器的计算量有限,摄像头的分辨率无法达到较高水平,百万级像素在车载摄像头领域已经是较高水平了,同时,由于成本限制,镜头加工精度、镀膜水平等与消费级单反相机存在较大差距,因此,成像品质又被大大压缩。熟悉摄影的朋友应该知道,光学变焦的镜头可以弥补传感器分辨率不足的劣势,那么,汽车上为什么不用可以光学变焦的摄像头呢?原因很简单,在高振动的环境中,变焦镜头的稳定性不足,其次,变焦的过程中,焦段变长,就会造成视角变小,摄像头在长焦端时,虽然可以采集远处信息,但近距离、不在长焦视角内的信息就无法采集,同时由于镜头焦平面变化,可能对近距离物体造成虚化,造成识别效率降低。即使以上问题都可以在一定条件下克服,那么,一辆正常的智能无人驾驶汽车什么时候该进行变焦呢?这一逻辑算法也是极难克服的,同时,对处理器的计算量也造成了不小的挑战,需要不断迭代才能实现。因此车载摄像头一般都会采用定焦设计。

图1 无人驾驶视觉感知摄像头
2 单目摄像头
单目摄像头作为视觉感知的鼻祖,凭借成本低,使用简单,空间位置要求低,在智能无人驾驶领域的比重越来越大。所谓单目摄像头,即利用一个摄像头模组进行图像采集,可视角度大约在50°~110°之间,单目摄像头可以对车道线、红绿灯、路标、行人、车辆等物体进行识别,通过人工智能神经网络系统对采集到的数据与数据库进行比对,识别出已经标记过的物体;识别率一般可以达到90%以上,甚至达到99%。提到比对识别,那么单目摄像头必须集成或连接到一个数据库,且数据样本足够大,才能应对各种各样的路况信息。对未标记过的物体,一般会进行忽略,这就会造成非典型的物体无法识别,比如,摔倒的人,蹲下的人,一些厂家会对这些非典型的情况进行学习,但是,样本过于庞大,还需要时间进行迭代。由于单目摄像机的分辨率原因,有效识别距离一般只能达到80~120 m左右,在车辆高速行驶时,远处物体不能有效识别,就会造成安全隐患。图2为单目摄像头采集识别图示。
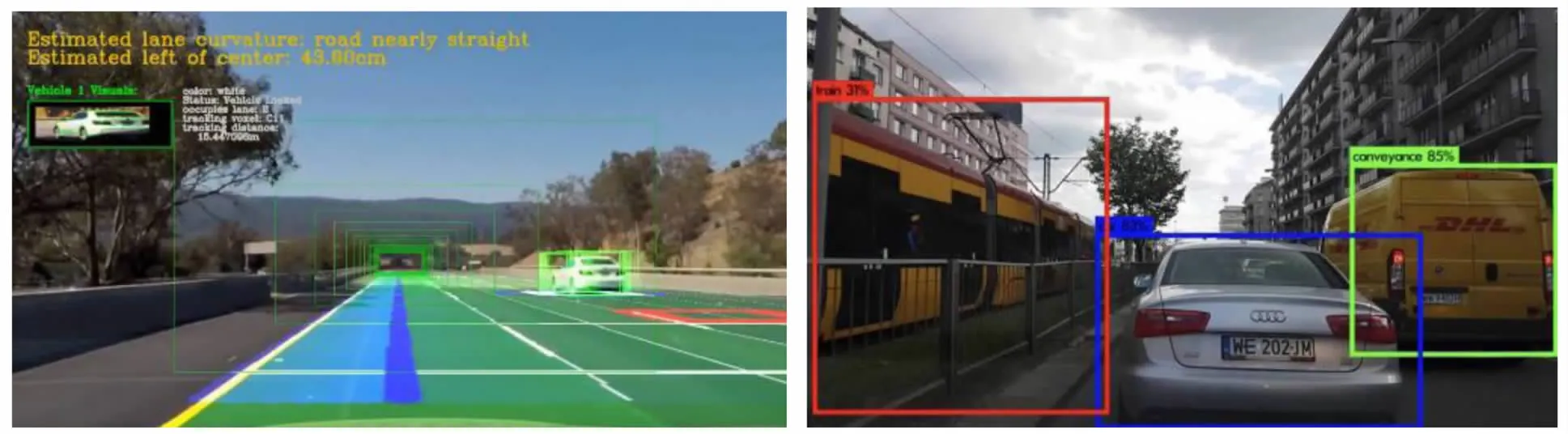
图2 单目摄像头采集识别处理示意图
3 多目摄像头
多目摄像头可以克服单目摄像头存在的问题,典型的应用是Tesla,采用广角、中等焦距、长焦摄像头组成阵列,广角摄像头视角可以达到150°左右,负责识别近处大范围物体,由于识别距离近,并不需要高分辨率的摄像头。而中等焦段摄像头视角为50°左右,负责识别车道线、车辆、行人、红绿灯、绿标等信息。长焦摄像头的视角只有35°左右,但识别距离却能达到200~250 m,用来识别距离较远的行人、车辆、路标指示牌等信息,通过多种摄像头的组合,在保证稳定性的同时,得到变焦镜头的优势。在智能无人驾驶多传感器融合的趋势下,多目摄像头搭配激光雷达或毫米波雷达的优势不言而喻,在克服成本同时,软件生态成熟后,多目摄像头的竞争力一定会大增。
4 双目摄像头
双目摄像头走的是另外一条路线,立体视觉,理念更接近于人眼,通过两个摄像头采集的信息,合成到同一个坐标系中,会产生坐标差,不同距离的物体视差不同,这样就形成了立体视觉,通过立体成像,在不依靠数据库的情况下依然可以检测障碍物。双目摄像头集成了摄像头和激光雷达的优势,既可以识别障碍物,又可对物体距离进行较为准确的识别,识别精度可以达到厘米级别,这样的精度在L3级别的自动驾驶来说已经够用了,毕竟人眼可达不到这样的精度。双目摄像头的精度取决于摄像头之间的距离,又称基线长度,基线越长,对于远处的物体识别效果越好,但又与视角有关,只能识别两摄像头视角重合的区间,基线达到一定距离后,对近处的物体识别又会造成影响,现阶段市面上双目摄像头的基线长度一般为120 mm左右,虽然双目摄像头有立体视觉和测距的优势,但并没有克服摄像头分辨率、视角等摄像头自身的缺陷。图3为双目摄像头深度检测示意图。

图3 双目摄像头深度检测示意图
5 多传感器融合
同时,还有一大技术难题摆在面前,那就是环境光线对摄像头的影响,在专业相机领域,佳能、尼康、适马等厂商,通过镀膜工艺、增加萤石透镜等技术改善摄像头眩光,但升本较高,难以普及到车载摄像头领域,现阶段的方法是通过多传感器融合,增加遮光罩、调整摄像头角度来避免环境光线对摄像头造成的影响。同时,多传感器融合是智能无人驾驶的趋势,这样,双目摄像头的优势就不那么明显,而单目摄像头或多目摄像头搭配激光雷达或毫米波雷达的优势不言而喻,在防止眩光方面,由于焦距不同,长焦摄像头搭配遮光罩使用时,产生眩光的几率会更小,同时与激光雷达或毫米波雷达组成多传感器融合方案,在感知方面做到冗余,在摄像头失效后,其他传感器依旧可以识别到障碍物。那么,双目摄像头就没有用武之地了吗?答案是否定的,毕竟与十几万的激光雷达比起来,成本较低同样是优势,在成本较低的低速园区无人驾驶车、无人机、机器人等领域优势显著,或许不久的将来,软件、硬件的迭代会发挥双目摄像头更大的优势。
猜你喜欢
农业工程学报(2022年8期)2022-08-08
青年文学家(2022年10期)2022-04-25
农业工程学报(2022年4期)2022-04-24
江苏农业科学(2022年6期)2022-04-15
汽车观察(2021年8期)2021-09-01
科技研究·理论版(2021年20期)2021-04-20
计算机与网络(2020年19期)2020-12-04
人民交通(2020年5期)2020-05-03
市场周刊·市场版(2019年55期)2019-12-08
科学大众(中学)(2017年3期)2017-07-06
