中空长航时无人机两段翼型设计和应用研究
2019-08-30 09:29李建华李锋李茂强包晓翔
航空工程进展 2019年4期
李建华,李锋,,李茂强,包晓翔
(1.中国航天空气动力技术研究院 浙江南洋科技股份有限公司,北京 100074)(2.中国航天空气动力技术研究院 彩虹无人机科技有限公司,北京 100074)
0 引 言
中空长航时无人机追求高续航性能和任务多样化,此类飞机通常具有大展弦比、低推重比和较大寄生阻力等技术特点,因而在起飞升力、起飞和巡航升阻比以及结构高度等方面具有很高的要求。首先,由于较大寄生阻力并追求高续航性能,此类无人机需用很大的巡航升力以提高其续航因子[1-4];其次,较小的推重比和短距起降要求无人机具有很高的起飞升力和升阻比;再者,大展弦比和内部装载要求机翼具有一定的结构高度;除此之外,着陆时又需要无人机具有较高的阻力,降低着陆距离并提高着陆安全性[5]。目前大多数此类无人机仅针对高巡航效率单设计点而开展设计[4],像本文原始飞机一样,存在起降距离长等问题。
两段翼型能保持较长的层流区,在大升力时维持较小阻力,同时可通过构型的变化适用于不同任务阶段,具有多任务适应能力等技术特点,是长航时和短距起降无人机翼型设计的一个重要发展方向[5-7]。两段翼型一般是在原始翼型的基础上参照常规襟翼设计方法,通过切割法生成外形[8]。目前,所能查到的国外文献,多是介绍两段翼型在此类无人机上应用的意义和所能达到的效果,并未查到针对设计方法的研究。W.H.Wentz等[9]虽然提到了翼型分割之后襟翼平移的设计思路,但未给出具体的外形生成方法。为了加强对外形的控制,国内,侯成义等[6]采用“椭圆-控制点切割法”来生成两段翼型外形;董斌斌[10]引入偏移量和斜率来控制襟翼前缘形状。但受限于设计方法和控制参数数量等因素,上述方法对初始翼型的依赖性较强。
本文在原始低速长航时无人机单段翼型的基础上,开展满足多设计点两段翼型设计方法研究,并结合数值计算和优化方法完成对翼型和机翼的改进设计及其改进效果分析。
1 翼型设计思路和生成方法
1.1 两段翼型设计思路
结合某型无人机在续航和起降特性改进方面的设计需要,为了满足起降、巡航以及结构高度等约束,在单段翼型设计的基础上,尽量维持原有翼型的基本几何形状(尤其是上表面,维持原有翼型在低雷诺数条件下层流特性[3]),并在主翼后梁高度和襟翼(第二段翼)前缘半径等关键位置设置控制点,其余部分通过分段可控二次曲线与原始翼型相切过渡。利用控制点加分段二次曲线方法快速生成两段翼型外形,之后通过优化程序使主翼及襟翼外形、缝道参数和转轴位置匹配,使之满足多设计点要求。
1.2 两段翼型生成方法
后缘襟翼生成方法通常参考《飞机设计手册》或文献[8],在原始翼型的基础上通过切割法生成襟翼外形。本文除了需考虑到高升力和多设计点综合设计,还涉及低雷诺数流动和层流再生成等复杂流动现象。从国外研究结果来看,其主翼和襟翼外形参数和常规襟翼参数分布存在较大差异[2-3,9],主翼和襟翼下表面外形也与原始翼型差别较大。
为了加强对外形的控制,侯成义等[6]采用“椭圆-控制点切割法”来生成两段翼型外形;董斌斌[10]引入襟翼头部上表面点位置偏移量和斜率来控制襟翼前缘形状,并通过形状控制变量来改变襟翼上表面外形。研究表明,上述方法与初始翼型关系较大,针对本文的初始翼型因外形改变量较大,效果不是特别理想。本文在文献[6]和文献[10]工作的基础上,借用其部分思想,通过在关键位置增加控制点数量并结合可控二次曲线生成两段翼型,提高其对原始翼型的适应能力,从而更加适用于优化程序,同时改善流场品质提高翼型性能。
具体的设计过程如下:
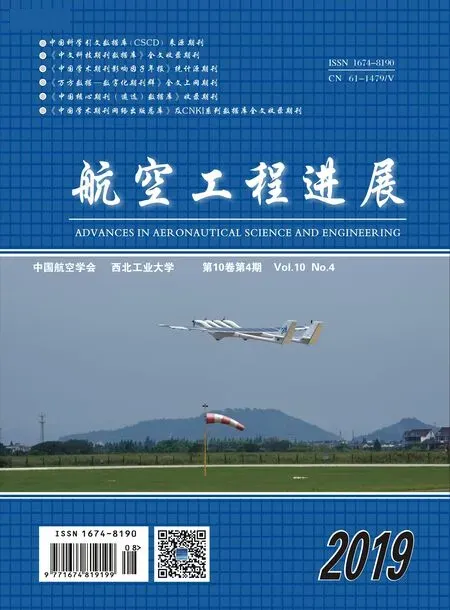
(1)将需要优化的外形分成五部分(如图1所示),即点1~点3段曲线段、点3~点5段曲线段和点1~点4段曲线段,其构成襟翼前缘外形;点6~点7段曲线段和点7~点8段曲线段构成主翼下翼面后缘外形。
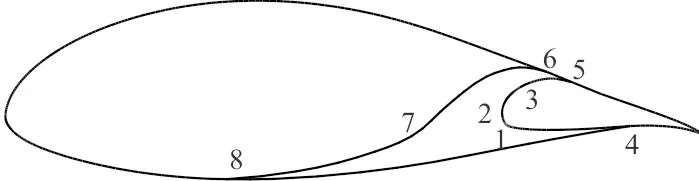
(a)外形生成示意图
(b)襟翼平移图1 两段翼型外形生成示意图Fig.1 Geometry generation diagram of two-element airfoil
(2)选择控制点及其参数,除了一般控制点约束(点4、点5、点6、点8只能在原始翼型上移动),点1和点2给定坐标(点2处斜率无穷大)用于控制襟翼前缘形状;为了更好地控制主翼后梁高度和后缘形状,点3和点7给定了点坐标与斜率,其值作为优化参数随优化过程而改变。
(3)设定曲线的形状控制参数用于进一步控制曲线的形式。此方法控制参数更多,很大程度上将主翼下表面和襟翼头部外形分开设计,下表面外形对原始翼型依赖性更小;同时结合目标要求对外形参数和缝道参数一并优化设计,从而具有更好的灵活性和适应能力,更适合多目标和多约束下的优化设计。
二次曲线控制方程表达式为
y2+ax2+bxy+cx+dy+e=0
(1)
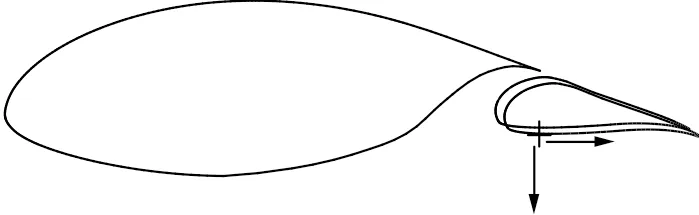
二次曲线可为椭圆、双曲线和抛物线,如果已知两端点的坐标和斜率,则可由形状控制参数(Q=DE/DC)决定曲线形状,控制效果如图2所示。根据外形生成的需要,点6~点7和点3~点5曲线段采用可变的形状控制参数控制其二次曲线类型,由优化算法决定形状控制参数Q值;其余曲线段根据初步研究结果采用固定形状控制参数(二次曲线的类型在优化过程中不变)。结合控制点参数和曲线类型能够生成翼型优化外形,例如通过联合求解点1的坐标、点2和点3的坐标与斜率得到二次曲线系数,从而确定点1~点3段曲线外形方程;其余曲线段外形方程的系数则通过联合求解相应曲线的起点/终点坐标和斜率以及形状控制参数而得到。
图2 形状控制参数对曲线的影响Fig.2 Effect of control parameter on curve shape
2 设计方法及结果分析
2.1 设计方法和条件
针对低速固定翼长航时无人机在巡航和起飞等状态下的约束进行两段翼型优化设计,优化参数包括两段翼型外形、缝道参数和转轴位置。考虑到无人机的使用和保障要求,襟翼形式尽量简单,采用固定转轴(转轴位置在设计过程中变化)。此外,本文的主要目的是验证两段翼型外形生成方法和优化设计方法的有效性,此阶段将巡航状态和起飞状态分开设计,巡航状态以最大升阻比为优化目标(长航时无人机续航性能为首选),优化变量为两段翼型外形和缝道参数;起飞状态以起飞升力为优化目标,以转轴位置为优化参数,并校核优化结果是否满足起降要求。考虑到目标函数与控制参数及约束条件的关系不明确,采用多岛遗传算法进行全局寻优;优化设计程序包含优化算法、翼型生成、网格生成、流场模拟和结果处理五大模块。
由于涉及到大升力和多段翼缝道流动,其流场特性包含大量粘性扰流和分离流。为了保证数值模拟的准确性,气动力通过求解RANS方程得到,选用SSTk-ω两方程湍流模型,此模型在低雷诺数分离流和襟翼升力方面都具有很好的模拟能力[11-12]。来流马赫数Ma=0.15,Re=3.0×106。为了更加准确地对流场进行模拟,采用多块C型网格(如图3所示),并保证每次优化过程网格参数分布一致,以避免因网格而对优化结果造成影响。
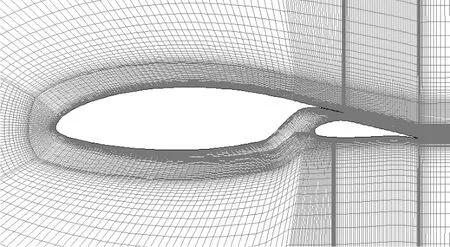
图3 计算网格Fig.3 Computational grid
2.2 设计结果及分析
续航性能对于低速长航时无人机而言是最为重要的指标之一,其在很大程度上依赖于翼型的升阻比,故翼型优化设计时以巡航状态的升阻比为目标;考虑不改变飞机基本配平情况,对翼型的俯仰力矩进行一定的限制,以不大于原始翼型百分之二的低头力矩以及大于初始升力系数为约束条件,优化变量、变化范围和优化后的参数取值如表1所示。δx和δy分别为襟翼向后和向下移动的量,以翼型弦长无量纲化,以点2的原始位置为参考点,其意义相当于缝道参数。Y1、Y2、Y3、Y7分别为点1、点2、点3、点7在Y方向(高度方向)的位置,其中Y1以点1所在弦向位置原始翼型下翼面点为参考点,以点2与点1的高度差无量纲化;Y2和Y7以相应位置的翼型高度无量纲化,以相应位置下翼面点为参考点;Y3以点2和点5的高度差无量纲化,以点2为参考点。K3、K7分别为点3、点7的斜率(以可控角的范围无量纲化)。经初步研究发现,点6~点7段和点3~点5段曲线的线型对优化结果影响较大,采用变化的形状控制参数(即Q67和Q35);其他线段根据初步研究结果采用固定形状控制参数。襟翼外形生成通常的做法是在原始翼型的某个位置进行分割,但这样简单处理襟翼上表面局部压力并不理想,本文将主翼和襟翼分割点进行分开设计,点6在点5的位置上进行适当调整,形成参数X6(以δx无量纲化)。
遗传优化每代总群体规模数为144,杂交概率0.7,变异概率0.03,最大进化代数40代。
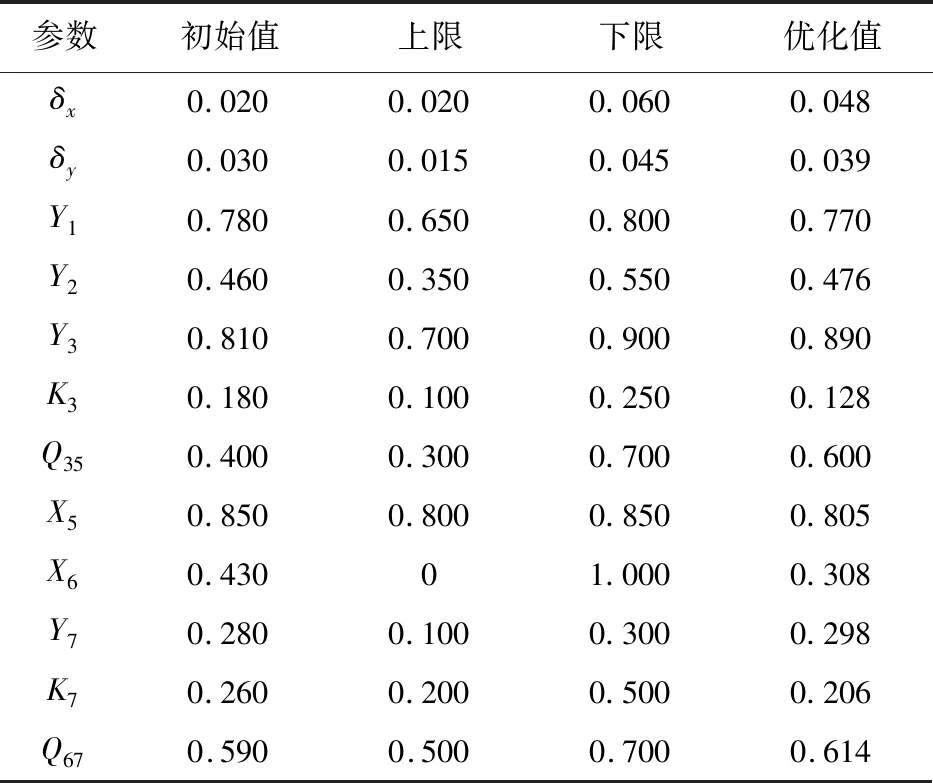
表1 巡航状态优化参数和优化结果Table 1 Optimal parameters and their optimal results of cruise
优化翼型和初始翼型的外形如图4所示,在优化翼型的基础上,对其气动特性进行评估,计算结果如图5所示,可以看出:相对于原始翼型,两段翼型升力线性段范围增加,最大升力系数由1.5增加到2.1,襟翼无偏转情况下最大升力系数增加40%;失速攻角增大,扩展了无人机的飞行包线,增强其抗风能力。在升阻比方面,滑跑状态下(0°攻角,襟翼放下)优化后翼型升阻比得到大幅提升,从约25提升到69;襟翼无偏转状态最大升阻比大于原始翼型(由67.0增加到68.3),但受两段翼型较大零升阻力的影响,较小升力下升阻比略低于原始翼型,在更大升力系数下(大于1.3),升阻比大于原始翼型。文献[2]等研究表明,此类长航时无人机其续航升力系数的选择与零升阻力有很大关系,本文研究的无人机最佳续航升力系数应该在1.3以上(Heron-1无人机巡航设计升力系数大于1.5),故相对于原始翼型,优化后的两段翼型更适合此类飞机。
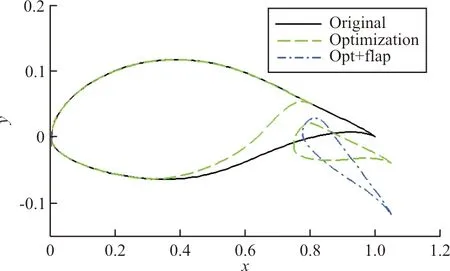
图4 原始和优化翼型Fig.4 Before and after optimized airfoil
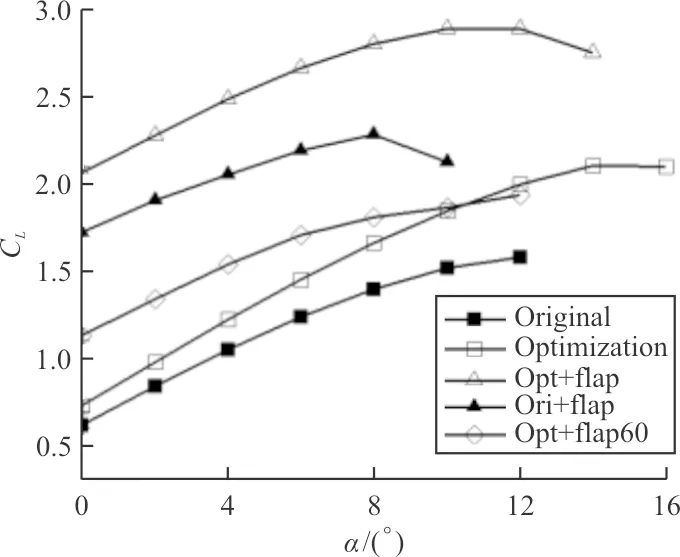
(a)最大升力系数对比
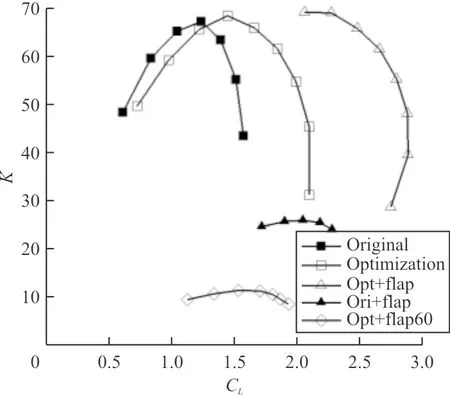
(b)升阻比对比图5 优化前后翼型气动性能对比Fig.5 Aerodynamic performance comparison of before and after optimization
优化前后翼型续航因子与升力系数的关系如图6所示,结合升力曲线,可以看出:在安全飞行包线内(1.2倍的失速速度,图中圆点),其最大续航因子由优化前的75.5提升到两段翼型的85.0(提升了12.6%),根据文献[2]等研究结果小幅度偏转襟翼后续航因子还能进一步提升。
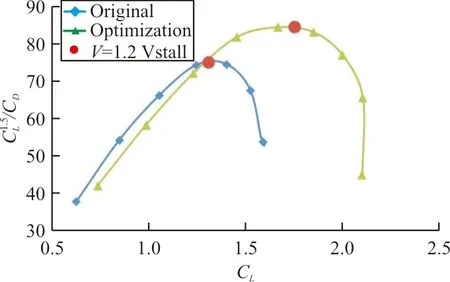
图6 优化前后续航因子Fig.6 Endurance factors comparison of before and after optimization
针对起飞要求,在相同襟翼偏转下(20°),优化前后最大升力系数得到大幅提升,由原始翼型的2.2提高到2.9。进一步分析发现,升力提升只是一方面,由于原始翼型为了追求巡航升阻比,翼型后缘加载比较严重,襟翼偏转后缘分离严重,在升力受到限制的同时阻力急剧增加。过低的升阻比(如图5所示)严重影响到此类低推重比无人机的滑跑加速度;研究发现,由原始翼型生成的无人机有/无常规襟翼对无人机的滑跑距离影响有限,极大地限制了无人机的使用(例如高原和短距起降)。优化设计后的两段翼型则不存在上述问题,在取得大升力同时保持高的升阻比,即在降低离地速度的同时还能提升无人机的滑跑加速度;相当于其起飞升力由原始翼型的1.4提升到2.7(由于受阻力影响,原始翼型使用无襟翼数据),改进后的两段翼型能极大地提升无人机的起飞性能。除此之外,襟翼的大角度偏转,在保持一定升力的同时阻力增大(图5中襟翼偏转60°情况下升阻比降到10左右),其效果相当于阻力板,可以满足着陆下滑和防止长距离飘移的大阻力(保持一定的升力)要求,具有集巡航、起飞和着陆多任务一体的技术特点。
在巡航状态的基础上,结合襟翼舵机功率(压力分布决定舵机功率)和飞机安装位置的约束,给出转轴位置的限制范围,对转轴位置进行优化设计,确定无人机转轴位置和起飞状态构型。优化所用方法与巡航状态优化设计基本一致,优化参数和优化结果如表2所示,在优化结果的基础上开展起飞状态不同攻角气动性能评估(如图5所示)。
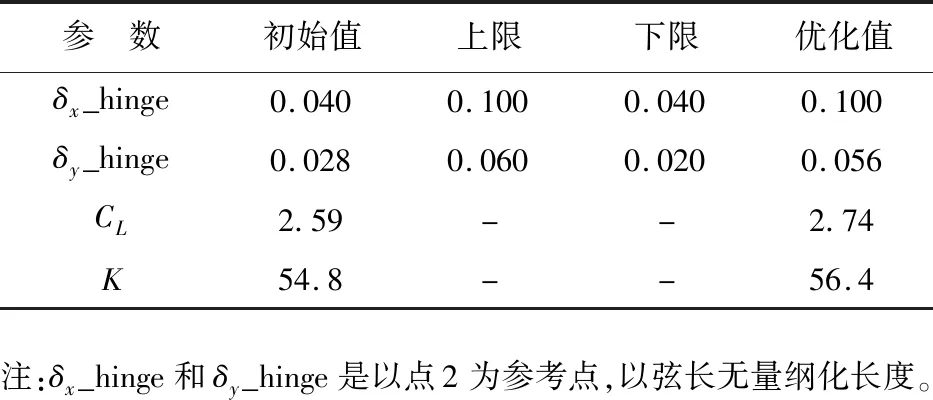
表2 起飞状态优化参数和优化结果Table 2 Optimal parameters and their optimal results of take-off
2.3 设计结果应用
利用上述两段翼型设计方法,开展对其工程应用的研究。针对某型无人机起飞距离长和着陆阶段减速慢等问题,在基本维持原有飞机巡航状态性能和主机翼结构的前提下,对其内翼部分进行改进设计(外翼维持原始飞机单段翼型),改进设计的效果如图7所示。
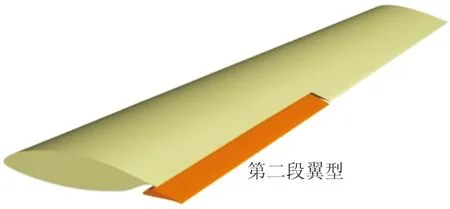
图7 飞机改进机翼外形图Fig.7 The configuration of the optimized wing
改进前后的气动性能对比如图8所示。
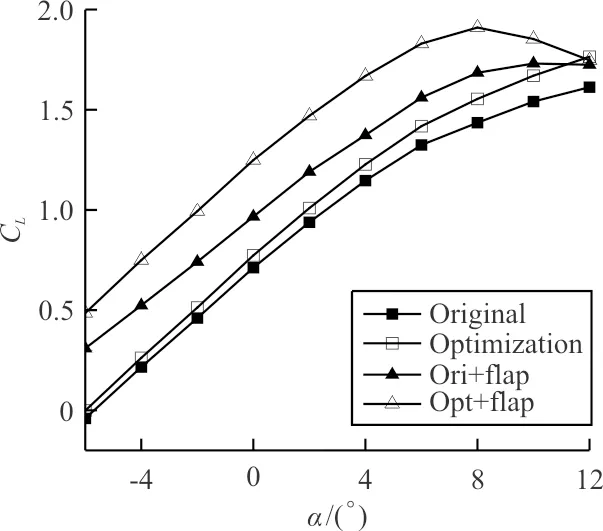
(a)升力系数对比
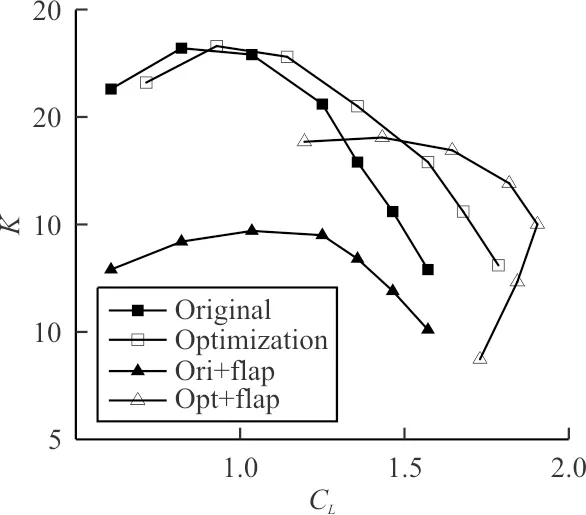
(b)升阻比对比图8 改进前后飞机气动特性对比Fig.8 Aerodynamic characteristics comparison of before and after optimization
从图8可以看出:尽管受到原有飞机巡航点气动特性(升力系数和力矩)和结构主梁等约束,在襟翼面积较小(约占弦长的20%)的情况下,飞机的起飞升力和升阻比得到大幅提升。20°襟翼情况下,起飞升力(6°攻角)由原来的1.56提升到1.83;滑跑状态(0°攻角)的升阻比由12.9提升到18.8;由于常规襟翼升阻比低,襟翼对起飞性能影响有限,改进后起飞升力的实际效果相当于由原来的1.32(无襟翼状态)提升到了1.83,极大地降低了无人机的离地速度。小攻角下(2°以下)巡航升阻比与原始外形基本一致,其他攻角范围改进外形升阻比高于原始外形。
改进前后飞机起降性能评估结果如表3所示,由于起飞升力和升阻比提高,改进外形离地速度减小18%,起飞滑跑距离减小约40%;接地速度减小11%,综合接地速度和大角度襟翼阻力因素,飞机着陆滑跑距离降低约55%。

表3 改进前后起降性能对比Table 3 Comparison of take-off and landing performance between the optimized configuration and original one
上述结果表明,即使受到巡航状态气动性能和主机翼结构等因素限制,利用本文设计方法,飞机在保持巡航性能(略有提高)的前提下,其起降性能得到大幅改善;弥补了原始单段翼型在起降阶段的不足,达到了对巡航和起降多设计点综合设计的要求,即针对中空长航时无人机,此方法具有明显的优势。
3 结 论
(1)相比于常规直接切割法,本文采用的方法控制点和控制参数更多,其对原始翼型适应性更好,更适合多目标优化设计。
(2)新设计的两段翼型续航因子和起飞升力分别提升了12.6%和40%,起飞升阻比由原始常规襟翼的25提升到了69。
(3)实际的飞机工程应用中,飞机的起降滑跑距离分别降低40%和55%,弥补了原始翼型在起降阶段的不足,达到了对巡航和起降多设计点综合设计的要求,此方法对中空长航时无人机设计具有重要意义。
猜你喜欢
航空维修与工程(2021年3期)2021-04-12
民用飞机设计与研究(2020年4期)2021-01-21
装备维修技术(2020年9期)2020-11-20
科学Fans(2019年4期)2019-04-30
科学与财富(2017年15期)2017-06-03
科技创新与应用(2017年1期)2017-05-11
中国科技纵横(2017年2期)2017-03-24
中学课程辅导·教师教育(中)(2017年2期)2017-03-24
科技与创新(2017年3期)2017-03-17
少年科学(2014年7期)2014-08-18