小型攻击型四旋翼无人机系统设计分析
2019-08-30 06:18刘明明
浙江水利水电学院学报 2019年4期
刘明明
(六安职业技术学院,安徽 六安 237000)
随着我国无人机技术的不断进步,在社会各个行业各种功能的无人机都得到了有效的使用,其不仅能够帮助我国提高在国际上的地位,还推动了新兴行业的发展。无人机的主要类型为固定翼的无人机,其在使用的过程当中准备的周期较长,反应速度较慢,在实际的使用过程当中,无法根据实际情况做出有效的反映,因此应该研究出成本更低、操作更加简单,并且在使用的过程当中响应速度比较好的方便携带的小型无人机是必然趋势。在该类无人机系统当中有效将四旋翼技术与图像通信技术融合在一起,能够提高小型攻击型四旋翼无人机的侦察能力和对使用环境的分析能力。
1 小型四旋翼无人机的主要技术
小型的四旋翼无人机最大的特点是垂直起飞和垂直降落,机动性和可操作性较强,操作人员的控制和侦查相对比较方便,并且还可以飞到离目标很近的区域内,发展空间较为良好。
1.1 系统的建模
四旋翼与传统的直升机存在一定的区别,主要采用的机械结构由四个旋翼组成,其中有四个固定的旋翼。飞行过程中的直接动力源是四个电机,通过控制和改变无人机的四个螺旋桨,能进一步简化无人机的结构以及其动力学的特征。在小型的四旋翼无人机当中,由于其尺寸小并且飞行的速度较慢,其低雷诺数的效应比较明显,但是它表面层比较容易出现分离的情况,且具有相对比较复杂的飞行条件,比较容易受到外界因素的影响,因此具有一定的不稳定性,在微型的螺旋升力特征以及阻力特征当中,雷诺数的影响较大,所以要想保证四旋翼无人机的稳定性,需要将旋翼升力和阻力计算的误差减少。四旋翼无人机在飞行过程当中,会受到一些物理效应和外部因素的影响。其中,物理效应包括空气动力、重力等;外部环境包括空气中的气流等,因此,会很难获得无人机的气动性能,从而无法建立更加准确的模型。在当今社会中,越来越多的研究学者开始注重研究旋翼的动力。在研究的过程当中使用的模型都是简化后的动力学模型,其建模的方法主要有:(1)利用相关的理论计算一些非线性或者线性的方程;(2)使用进行的具有实验中获取的结果数据对相关的方程进行研究。
1.2 四旋翼无人机的飞行控制技术
无人机当中的自主控制主要是其具有自主性或者自主能力的一个控制的过程,不会受到外界的控制干涉而拥有的自我控制决策的能力。无人机系统拥有比较快速的自主适应能力,并且能够在线感知环境的态势,重构控制并进行信息处理工作。在2000年,美国就提出了相关的自主作战,在其空间研究室内定义的自主控制级别有10个,在无人机的自主控制等级主要是划分联系无人机驾驶飞行器的任务,因此,任务需要不同,则自主控制的等级也不同。在四旋翼无人机系统中,由于其极容易受到外界及自身系统的干扰、影响,导致要想设计及飞行控制系统非常困难,而四旋翼无人机中随着飞行尺度的减小其导航测量的系统和性能也会下降。如果四旋翼无人机要在不同的飞行条件之下,都能保证其良好的飞行品质,就需要将无人机本身的自主等级有效提高,从而实现自主飞行的目标。
1.3 控制四旋翼无人机的原理
在四旋翼无人机系统当中,主要采用了四个旋翼的机械结构,通过将四个螺旋桨产生的升力进行控制,简化结构和动力学的特征,逆时针旋转四旋翼无人机的前桨1和后桨3,顺时针旋转其他两桨,这种结构被称为反向对称结构。其有效代替了传统直升机的尾旋翼,在飞行过程当中通过改变四个旋翼的转速,就会产生各种不同的飞行姿势,使无人机能够向预定的方向进行运动,从而完成一定的任务。[1]四旋翼无人机控制原理(见图1)。
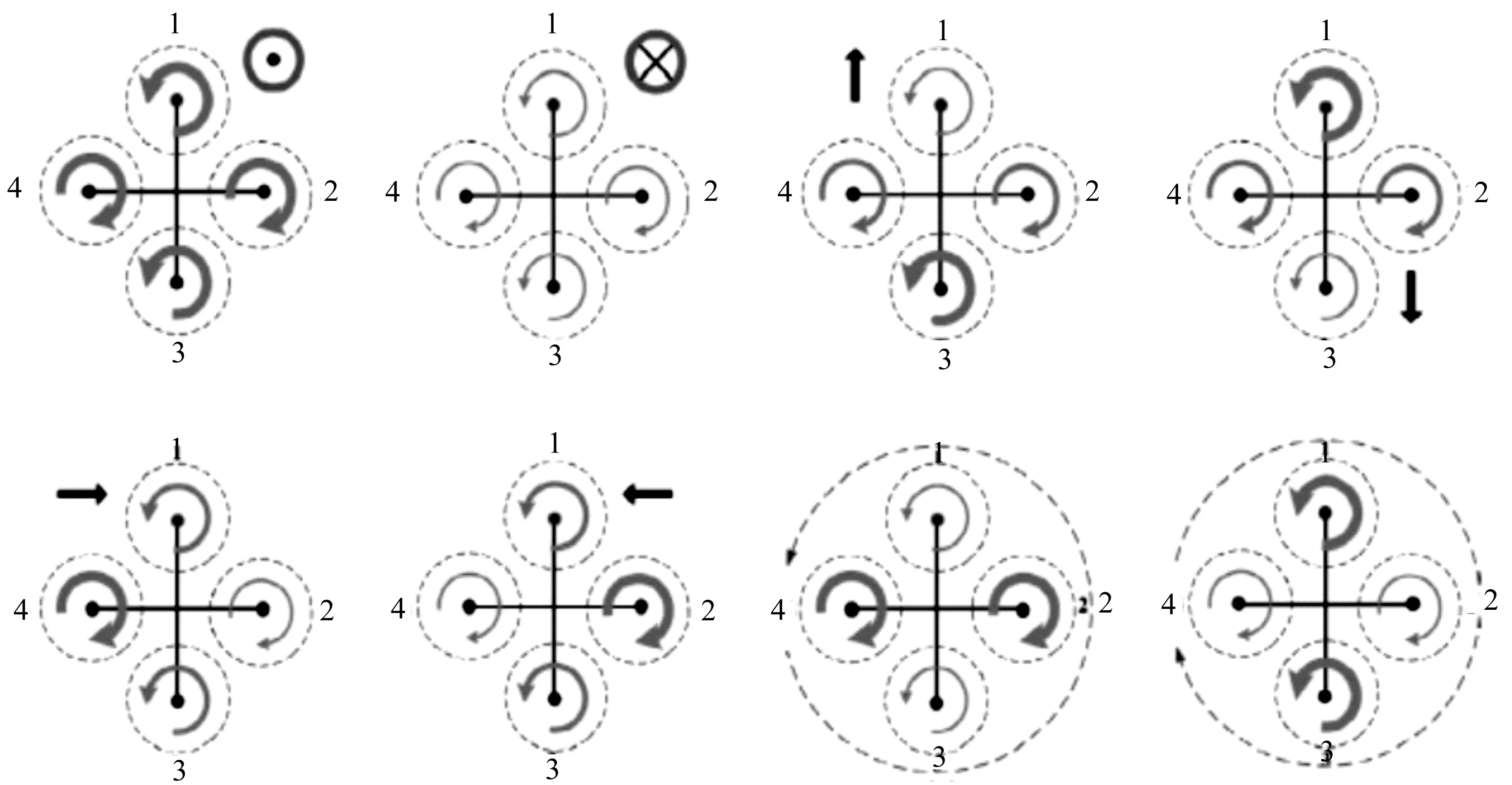
图1 四旋翼无人机控制原理
通过调节四旋翼的运动方式,可以将四旋翼无人机飞行控制的方式分为四种:垂直飞行控制、横滚控制、俯仰控制以及偏航控制等。其中垂直飞行控制主要是当四旋翼处于水平位置时,会重合垂直方向的惯性坐标和机体的坐标系,将四个旋翼的转速增大或者减小,产生一定升力,从而让四旋翼无人机上升到规定的飞行高度,而在悬停的过程当中,让四个旋翼的转速保持相等,则会产生平衡的推力和重力,保持在某一高度的状态,此时其姿态角为0。综上所述对垂直飞行进行控制,主要就是要将四个旋翼的转速进行稳定,从而保持一定的变化量。[2]
2 小型攻击型四旋翼无人机系统的设计
2.1 方案的总体设计
2.1.1 框架设计
小型攻击型四旋翼无人机系统主要是由四旋翼无人机以及地面控制站组成。在四旋翼无人机中飞行器是机载的平台,系统组成包括飞控系统和火控系统。四旋翼飞行器中负责稳定和规划飞行器姿态以及航线的控制系统是飞控系统,而火控系统则是根据地面控制站所发出的指令,瞄准目标以及发射模拟的导弹,并实时以及精准打击相关的目标。无线传输系统则是可以通过无线电让四旋翼飞行器与地面的控制站之间实现通信的目标。地面控制站主要是加固的笔记本电脑构成。它的作用就是处理实时传回的图像详情,并对四旋翼无人机进行控制,该系统的数据链框图(见图2)。
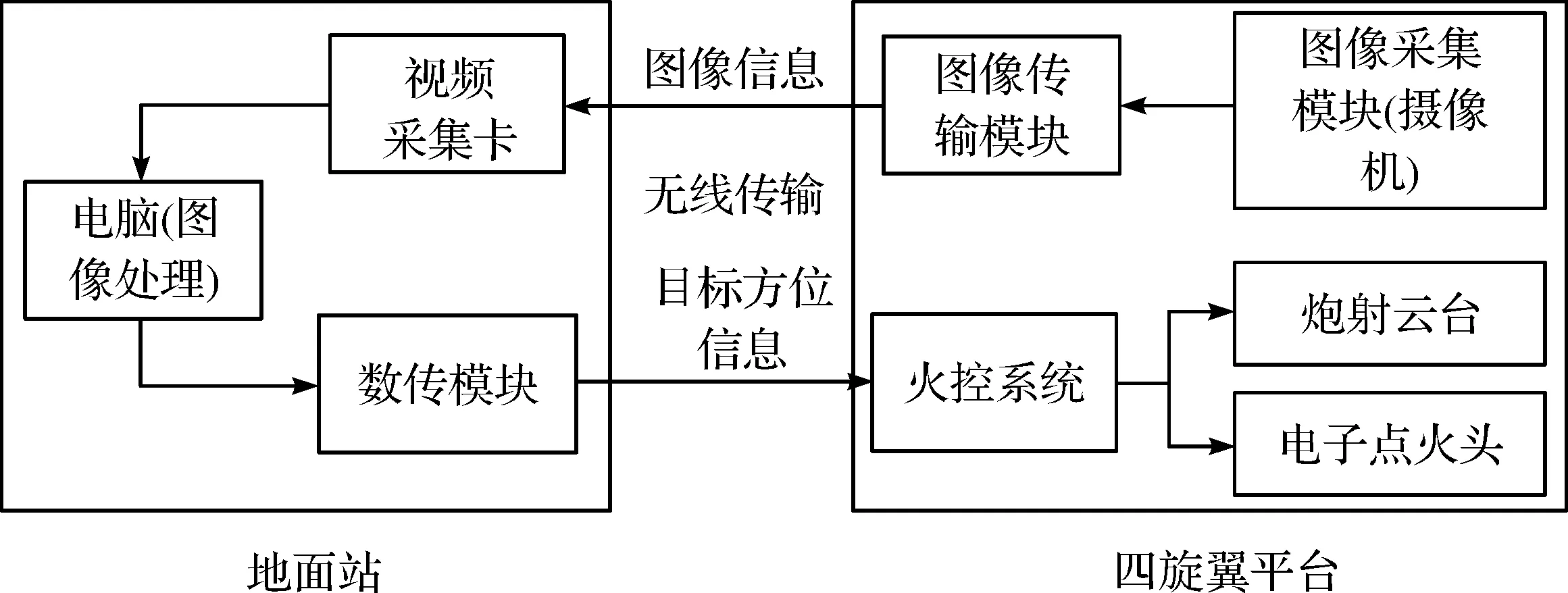
图2 四旋翼无人机控制系统数据链框图
2.1.2 无人机系统工作流程设计
在使用的过程中,小型攻击型的四旋翼无人机可以由单人携带,当需要对难以通行的区域进行侦察时,操作人员可以通过在地面上对无人机进行操作,从而让它飞向指定的区域内,四旋翼无人机通过其本身自带的摄像头采集战场内的实时图像信息,并传送回地面控制站中帮助操作人员对环境情况进行掌握。[3]
2.2 设计硬件的方案
2.2.1 机载平台的设计
作战的环境多种多样,所以小型攻击型的四旋翼无人机能够在森林以及密集的街区等地形比较复杂的地方都能进行作战,本文设计的系统选择的机载平台主要是以静态和准静态飞行状态下都具有较大优势的四旋翼无人机(见图3)。

图3 四旋翼无人机
该类无人机的轴距为0.41 m,最大的承载量为3 kg,拥有20 min的续航时间,并且其最大的行巡航速度54km/h,该无人机还具有自主飞行以及垂直起身和降落等的功能,可以折叠,便于携带,折叠之后的无人机的尺寸为50 mm×35 mm×20 mm,能让无人机的战场响应速度进一步提高。
2.2.2 飞行控制系统
在四旋翼无人机当中的飞行操控系统主要由飞行处理器、惯性测量单元以及气压计等几个部分组成。飞行处理器的主控制器的型号为STM32F427,其协助处理器的型号为STM32F103。当主控制器出现故障不能操作时,就可以启动协助处理器控制无人机,从而让无人机在作战过程中的安全性得到保障,也避免无人机坠毁,在飞控系统当中设置双控制器能够将无人机在空中飞行的安全性极大提高。[4]
飞控系统当中的惯性测量单元采用的芯片型号为LSM303,该类芯片有效结合了即加速度计、地磁传感器,在惯性测量单元中还包括型号为L3GD20H的低功耗的三轴陀螺芯片,通信速度可高达400 kHz,该类惯性测量单元的工作温度范围在-40℃~+85℃之间。
2.3 火控系统的设计
火控系统包括火控电板路和炮射云台两个部分。火控系统当中的火控电路板的处理器的芯片型号为STC89C52RC,该芯片是一款单片机,具有较高的可靠性。它的功能包括能对数据进行处理、驱动电机以及对继电器进行控制等,主要用于接收地面控制站发出的指令,并根据相关的指令控制好无人机中的炮射云台,实现瞄准相关的目标,发射出炮射的工作。[5]
炮射云台主要是对炮台的俯仰角与方位角进行控制,主要的控制工具是两个步进电机。在实验的过程当中的武器是模拟的火箭,该模拟火箭的射程为100 m,不具备较强的杀伤能力,所以在实践过程中火控系统可以有效根据实际的需要装备一些武器,比如小型的枪械、烟雾弹、麻醉枪等。
2.4 无线传输系统的设计
无线传输系统进行数据传输使用的模块是汇丰HC12模块,通过无线链路把地面站处理的相关结果传送到火控系统当中。在使用该模块进行工作的过程当中,其频率的范围一般为433.4~473 MHz,空闲的电流一般为16 mA,发射功率最高可达100 MW,传输的最大距离一般为1 km,通信是把串口与处理器连接进行通信,操作过程相对比较简单、高效,也具有一定的可靠性。
在无线传输系统当中传输图像使用的模块是欧姆威5.8 g模拟的图像传输模块,能够传输图像的距离一般在3 km左右,可以调控的评频点一共有32个,图像传输具有较强的抗干扰能力,且发出的热量较少,所以该系统的使用寿命相对较长。[6]
2.5 地面控制站的设计
在地面控制站中使用的处理器是Intel Corei5-2 400处理器,其主频是3.10 GHz,拥有4 GB的内存,功能包括能够在电脑屏幕上实时显示出采集到的视频和图像,传递实时信息,能够有效利用目标识别技术,将采集到的图像信息实时传回地面控制站中,并将目标识别出来,在控制回路的过程中可以把人作为一个环节,从而使人机的交互性不断增强,进一步控制好四旋翼无人机。
3 图像算法以及该系统设计的实现
3.1 图像算法研究
在无人机进行巡航飞行的过程当中,使用飞行控制算法进行控制,通过无人机上的摄像头有效采集实时的图像发送到地面控制站中,并且灰度化等预处理采集到的图像,让操作人员能够识别目标,从而在火控系统当中发送相关的指令,其指令包括对目标的定位等,有效实现实时目标的锁定,其主要的具体流程(见图4)。
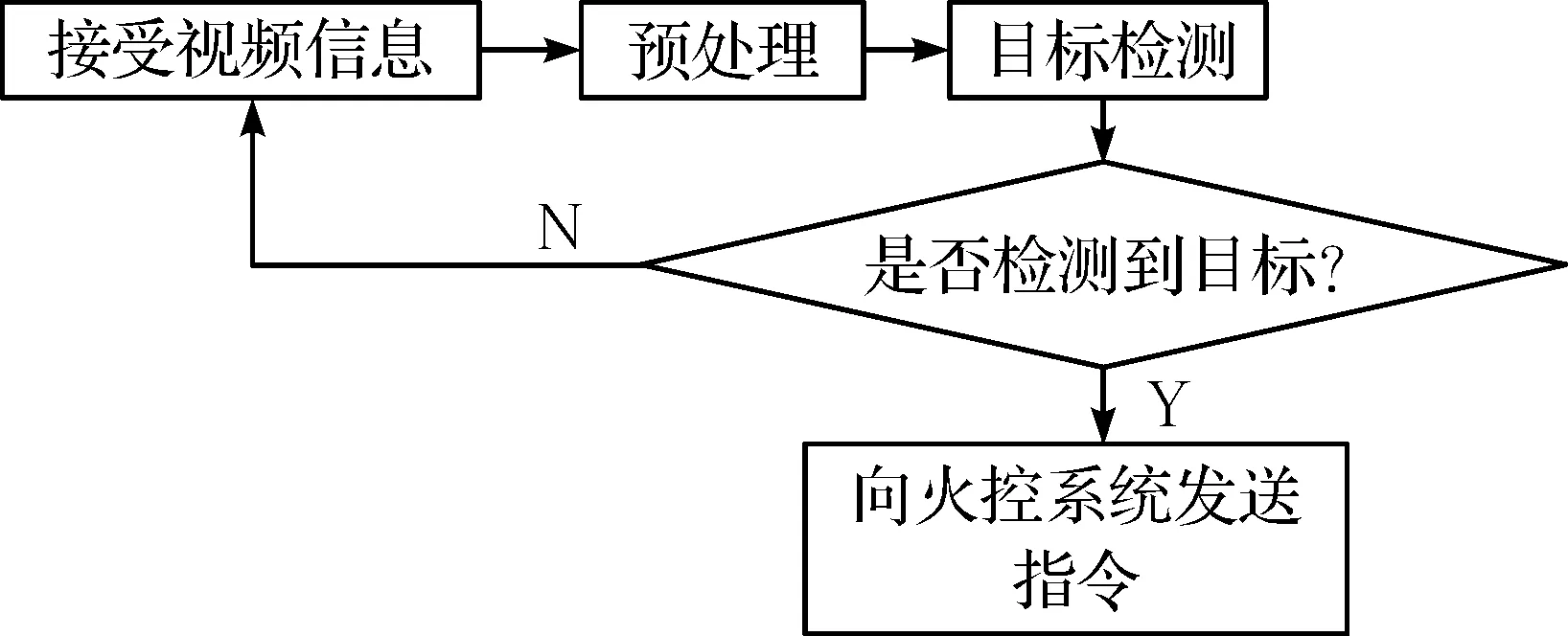
图4 无人机飞控算法控制流程图
在小型四旋翼无人机系统当中,需要拥有对目标的实时性和准确性有较高的识别能力,因此在选择算法过程当中应该选择具有较强的适用性和匹配能力的SIFT方法,尽管该算法在旋转、缩放等中具有一定的不变形,但是由于其产生的特征维数较大,算法的复杂程度较高,且进行计算的量较大,因此实时性的要求难以满足,所以本文提出了对SIFT特征图像匹配算法改进的方法:(1)有效减少一些匹配的时间,主要是采用新的方法生成相关的SIFT特征描述符,有效降低其特征向量的维数,从而减少需要进行匹配的时间;(2)将匹配的精度提高,在该算法当中可以积极采用双向匹配的思想,利用好先进的检测算法,有效降低出现错配的概率,从而进一步提高该算法的匹配精度。[7]
3.2 系统设计的实现
为了能够充分认识到该系统的有效性和可靠性,通过搭建出一个四旋翼机载的平台,将无人机与地面控制站使用无线链路连接起来,并在实验场地内设置假目标,通过在地面控制站对过对无人机进行控制,在操场中进行搜查目标。通过该试验可以知道,当目标进入了无人机的视野当中,地面控制站就对该目标进行锁定和确定,发布指令到无人机中的火控平台,让炮射云台能够迅速瞄准制定的目标,通过该实验可以证明小型四旋翼无人机系统设计具有一定的可靠性,其主要的效果实验效果(图5)。

图6 无人机识别目标的瞬间
4 结语
在社会不断发展的过程中,对四旋翼无人机系统的要求也越来越高,四旋翼无人机能够在一定程度上让其垂直起降、自主飞行的目标实现,并且该类无人机还具有方便携带以及响应速度较快、适应性较强等特点,通过四旋翼无人机的摄像头传输实时的图像信息,让地面站进行处理,能够快速识别目标,帮助操作人员了解现场比较复杂的环境,所以该类无人机在现代化的社会当中具有比较宽广的发展前景。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
科技风(2019年31期)2019-12-05
重庆与世界(2019年10期)2019-11-25
中国电气工程学报(2019年3期)2019-09-10
电子制作(2019年9期)2019-05-30
无人机(2017年10期)2017-07-06
北京航空航天大学学报(2016年8期)2016-11-16
汽车零部件(2014年1期)2014-09-21
微型计算机(2009年17期)2009-05-19