基于地磁车位停车计时算法系统的研究与实现*
2019-09-03 07:22李向荣张明克范福海
计算机与数字工程 2019年8期
李向荣 张明克 范福海
(青岛科技大学机电工程学院 青岛 266061)
1 引言
城市由于交通设施的增加造成的交通拥挤甚至混乱给人们的生活带来极大的不便[1],这种不便迫使人们去寻找高技术的有效手段去解决这种不便。智能化的停车场就是顺应这一时代需求的高技术产物。这不仅可以有效地解决乱停乱放造成的交通混乱[2],而且可以促进交通设施的正规化建设。市场上存在的地磁传感器用于检测车辆的存在和车型识别,准确率是制约停车收费系统稳定性的重要因素,尤其是在地磁误报或者不报的情况下,造成停车计时计费的偏差[3~4],直接影响到消费者的根本利益。因此,本文着重围绕地磁上报数据的各种情况全面合理的展开分析,抛出问题。并分析问题同时提出解决方案,然后将新方案纳入测试系统中验证可靠性和实用性。
2 系统框架
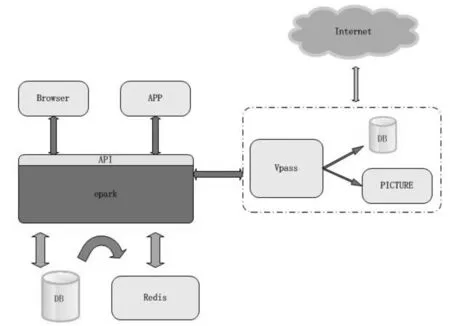
图1 平台架构图
epark最主要的是接口部分,展示层网页JSP、手机APP、VPaas对接三部分组成。1)Ajax请求到对应的地址并对应到程序接口,程序处理后返回对应的请求结果。2)程序读取数据库配置类信息,刷新到Redis缓存中,可加快访问速度。3)VPass指令传输到接口,根据指令内容完成对应的业务逻辑,比如推送到手机、保存订单信息、基于泊车状态的逻辑。4)地磁检测器发送驶入驶出,VPass首先完成数据的存储,然后发送到平台。
关于Vpass的部署:
Vpaas也利用数据库,表:Vpaasv2_db.domain_appkey,负责请求转发。
3 地磁检测器的工作原理
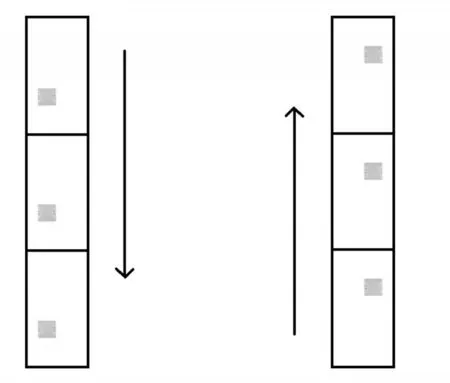
图2 地磁检测器实物图
工作原理:基于磁场传感器的车辆停放状态探测装置,包括电源,探测器,数据处理与传输模块。探测装置利用磁场传感器在有外部磁场干扰源的影响下,各个方向上的磁场数据发生比较大幅度的变化,依据变化的幅度情况判断该区域是否有车辆停放,在无车的情况下,其采集到的X、Y、Z三轴的数据就是当地的磁场数据。有车在磁场传感器的上方时,三轴的数据将发生明显的变化,并用Matlab把三轴的数据进行分析并总结出判定算法。

图3 三维磁场向量图
算法公式如下所示[9]:

其中 Mout表示模长即灵敏度;Xr、Yt、Zr表示当前时刻采样得到的分别在X、Y、Z轴上投影后的磁场值;Xl、Yl、Zl表示分别在X、Y、Z轴上投影后的基准值或者叫本底值。
具体的判定有无车的算法流程如图4所示。

图4 判断有无车的算法流程图
4 地磁车位的订单生成流程
手机端APP的目标用户是现场收费人员,车辆停入泊位后,地磁检测器报有车后将会向云端传送数据1,此时会触发推送通知收费员该泊位有车辆驶入,此时泊位状态由空泊位变为占用,收费员手动创建订单。车辆在离场后,地磁检测器报驶离后将会向云端传送数据0,此时会触发推送通知收费员该泊位有车辆驶离,这时需要收费员对该车辆进行离场操作结束订单[5~8]。
5 分析问题
鉴于收费员反映的快慢[9],所有订单的驶入时间取法为:若创建订单时间之前20min之内有地磁数据1时,则取地磁报1时的时间作为订单的驶入时间。若创建订单时间之前20min之内无地磁数据1时,则取当前收费员创建订单的时间作为订单的驶入时间。其中,着重分析的驶离时间的四种异常情况如下。
1)订单驶入时间和收费员操作订单结束时间之间没报驶离,如图5所示。

图5 A种异常
2)订单驶入时间和收费员操作订单结束时间之间有报多次驶入,如图6所示。

图6 B种异常
3)订单驶入时间和收费员操作订单结束时间之间有报多条驶离时,如图7所示。

图7 C种异常
4)订单驶入时间和收费员操作订单结束时间之间有报多条驶入驶离:(1)当有报多条驶入驶离且第一条为驶入时,如图8所示。

图8 D种异常
5)当有报多条驶入驶离且第一条为驶离时,如图9所示。

图9 E种异常
6 解决问题
改进即校正驶离时间:改进规则计算出更准确的驶离时间。
通过分析各种异常情况知道唯一正常的订单情况为订单驶入时间和收费员操作订单结束时间之间有且仅有一条报驶离,除此之外的订单需要通过处理异常情况逻辑代码计算出正确的停车时长并校正订单的驶离时间。处理异常情况逻辑部分代码如下:
A种异常处理逻辑:取收费员操作时间作为订单的驶离时间;
B种异常处理逻辑:取收费员操作订单结束时间作为订单的驶离时间;
C种异常处理逻辑:当有报一条驶离时取这条唯一的驶离时间作为订单驶离时间,当有报多条驶离时取最后一条驶离时间作为订单驶离时间;
D种异常处理逻辑:当有报多条驶入驶离且第一条为驶入时取最近的一条驶离作为订单的驶离时间;
E种异常处理逻辑:当有报多条驶入驶离且第一条为驶离时取第一条驶离作为订单的驶离时间。
分析可知唯一正常的订单情况如图10所示。

图10 正常情况
本文用jQuery EasyUI技术选出异常订单所对应的地磁泊位如图11所示。

图11 异常数据表
页面后台查询逻辑如下:

//查询该订单,在驶入时间和操作驶离时间内,上报地磁是驶离的数据的条数

//只有当订单期间只有1条地磁数据,且是驶离数据的,才是正常情况。除此之外的所有情况,都是异常情况,都要查询出来。 if

导出数据如表1所示。相应的异常地磁数据查看如图12所示。

表1 导出的异常数据

图12 异常地磁数据
页面后台逻辑如下:
地磁泊位结合地磁服务器导出采集的异常x轴、y轴、z轴的磁场变化量及angl和dtype的数据值,部分数据如表2所示[10~11]。

表2 导出的异常坐标轴数据
对上表中选出的显示在上位机软件屏幕上的三轴磁场数据即x轴、y轴、z轴用Matlab软件分析如图13所示[12~20]。

图13 灵敏度分析操作界面
作图14如下。

图14 灵敏度随基值的变化趋势
通过对地磁检测装置所上传上来的数据进行分析,总结出新增规律及判定条件为:当灵敏度>5并且轴变化量>5时也判定为有车。
7 结语
验证校正结果逻辑:通过获得订单集合,依次查询此订单集中每一个订单在订单驶入时间和收费员操作订单结束时间之间所对应的地磁数据集合,定义一个布尔变量,然后判断此地磁数据,是否正常(有且仅有1条驶离数据,是正常),如果只有1条记录,且是驶离数据0,则返回为true,否则返回为false。如果返回false,则控制台输出异常,订单编号,泊位号码,驶入时间,驶离时间,收费员驶离操作时间。并且控制台输出相应的地磁数据编号,泊位号码,上报时间,上报数据(上报数据如果为1则控制台输驶入,上报数据如果为0则控制台输驶离)。然后结合上文中的四种异常情况判断属于其中何种异常,并查看控制台输出的该订单驶离时间是否取值对应异常情况的处理办法。如果返回true,则属于正常订单,此时控制台输出订单编号,泊位号码,驶入时间,驶离时间,收费员驶离操作时间。验证输出结果为:A种异常验证结果符合处理逻辑B种异常验证结果,符合处理逻辑C种异常验证结果,符合处理逻辑D种异常验证结果,符合处理逻辑E种异常验证结果,符合处理逻辑。同时地磁判定算法中加入新增规律及判定条件后较之前准确率也提高了1%。
鉴于论文的改进是否具有实际意义,需要在路边停车收费模式实践中检验跟踪,并且跟踪统计结果为停车投诉因地磁问题导致的分布表如图15所示,由原来的平均每天62条投诉降至平均每天44条。

图15 停车投诉分布表
猜你喜欢
测控技术(2022年4期)2022-04-27
雷达科学与技术(2021年5期)2021-11-29
西安电子科技大学学报(2021年2期)2021-04-30
软件导刊(2021年3期)2021-03-25
意林原创版(2020年2期)2020-03-17
汽车与安全(2019年5期)2019-07-30
科技风(2018年15期)2018-05-14
珠江水运(2017年16期)2017-09-21
科技致富向导(2013年21期)2013-12-10