
滚筒型无介质停车AGV技术与应用
2019-09-03 12:46阙景阳涂梦瑾
物流技术与应用 2019年8期
文/阙景阳 涂梦瑾
随着我国汽车行业的发展和人民生活水平的提高,汽车的保有量快速提升,但城市化进程的加速和城市规划的不合理等因素造成了汽车停车位的严重不足。停车难、停车乱等问题已经成为制约城市发展的顽疾。
自从我国立体车库行业发展二十多年以来,加快存取车效率、提高空间利用率、减少车库施工量、强化产品适应性等目标始终摆在前列,继深圳怡丰机器人科技有限公司(以下简称“深圳怡丰”)先后推出梳齿AGV、台板AGV以来,国内外市场对停车AGV产生了强烈的认同。
停车AGV继承了普通AGV的全向移动、路径柔性灵活、自动导航不需要铺设轨道、地面适应程度高、智能化高等优点。与传统停车场库相比,AGV停车库具有车位数量多、空间利用率高、能适应异型场地、自动存取车、存取快速、停车安全、节能环保等优点,可广泛应用在不规则的异型车库中,特别适用老旧车库的改造和新车库的建设。
AGV停车库处于发展的初始时期,为解决停车难的问题开辟了新的思路,做出了突出的贡献。目前国内外主流成熟的停车AGV多数以梳齿AGV和台板AGV为主。但梳齿AGV需要在地面安装梳型架,破坏地面增加施工量;台板AGV需要载车板(台板),增加了车库的建筑高度并且存取车需要2次换板,效率不高。这两款AGV都属于有介质停车,即搬运、存储汽车都需要除AGV车体外的其他辅助介质帮助下完成,这也成为AGV车库发展的一个制约因素。
针对此现状,深圳怡丰研发了一款滚筒型无介质停车AGV。该产品采用“夹持机构”、“车载滚筒”和“AGV车体”三者同步配合的方式,实现原地对汽车的直接搬运,在行业内引起较大反响。
一、停车AGV现状
当前国内外市场的停车AGV主要有“梳齿型”、“台板型”、“夹轮胎型”等三种形式。国内AGV停车机器人的技术发展迅速,目前已有近20余家企业开始涉足。其中既有传统的立体车库企业,也有工业/物流AGV企业。

图1:梳齿型停车AGV
1.梳齿型停车AGV
梳齿型停车AGV是通过车身梳齿型结构与车位或出入口平台的梳型结构交错搬运车辆,实现车辆存取的一种智能停车AGV,如图1。梳齿型停车AGV的工作原理是外梳齿固定,内梳齿设置在AGV上,可进行上下交错运动,通过AGV的举升机构上下升降,即内梳齿的上下运动实现车辆的存取。每个车位都设有固定的梳型架,出入口停车平台也需设置停车梳型架。2015年深圳怡丰在国内率先研发出了梳齿型停车AGV,并在南京夫子庙地铁站投入商用。

图2:台板型停车AGV
2.台板型停车AGV
台板型停车AGV是一种通过车台板搬运汽车,实现汽车存取的一种智能停车服务机器人,如图2。这种停车AGV的工作方式是:汽车停放在车台板上,AGV潜入台板下举起台板,然后AGV把汽车和台板搬运到指定停车位或者出入口。此类型的停车AGV需要每个停车位上都有车台板,每一次的存取车要有台板的2次搬运,所以存车效率不高。由于台板AGV的“潜入台板”特性,所以车位可以横向纵向布置,车位利用率比较高。
美国Boomerang和ParkPlus是最早开发出车台板型停车AGV的公司。Crystal Springs Resort是Boomerang第一个商业运营自动代客泊车系统,车位数量40个。ParkPlus研发了ParkPlusAGVSystem系统,也是基于车台板交换技术的停车机器人及自动代客泊车系统,目前已在BrooklynHeights、Greenwich等地方的项目中应用。2016年深圳怡丰在国内推出了台板型停车AGV,并在阿布扎比等项目上投入商用。海康威视在乌镇的台板型停车AGV也已经投入使用。

图3:Ray夹轮胎型停车AGV
3. 夹轮胎型停车AGV
夹轮胎型停车AGV是通过加持机构夹起汽车轮胎实现搬运的停车机器人,如图3。德国Serva Transport Systems GmbH公司开发了Ray自动泊车机器人及自动泊车系统,已在杜塞尔多夫机场实现应用。杜塞尔多夫机场停车场有大约260个车位。乘客存放汽车时,将汽车停放在中转站,随后中转站的激光扫描器扫描汽车的外形尺寸和轴距等参数,并传输给Ray;然后Ray根据测量的数据自动调整叉臂位置,将汽车抬起并运送至指定车位。

图4:滚筒型无介质停车AGV
4.各类型停车AGV机器人的优缺点比较
搬运介质上:梳齿型停车AGV需要在地面安装梳型架,台板型停车AGV需要载车板,夹轮胎型停车AGV不需要搬运介质。
存取车速度上:梳齿型停车AGV其存取车简单,故速度最快;夹轮胎型停车AGV速度次之;台板型停车AGV由于需要二次还板,所以速度最慢。
车位利用率上:台板型停车AGV可以横向存取车,可以有横向、竖向车位,其车位利用率最多;梳齿型停车AGV只能有竖向车位,但可以做重列车位,故车位利用率次之;夹轮胎型停车AGV只能用侧向车位,且一个巷道无法实现双重列,故车位利用率最低。车位利用率是AGV车库的一个关键性指标。
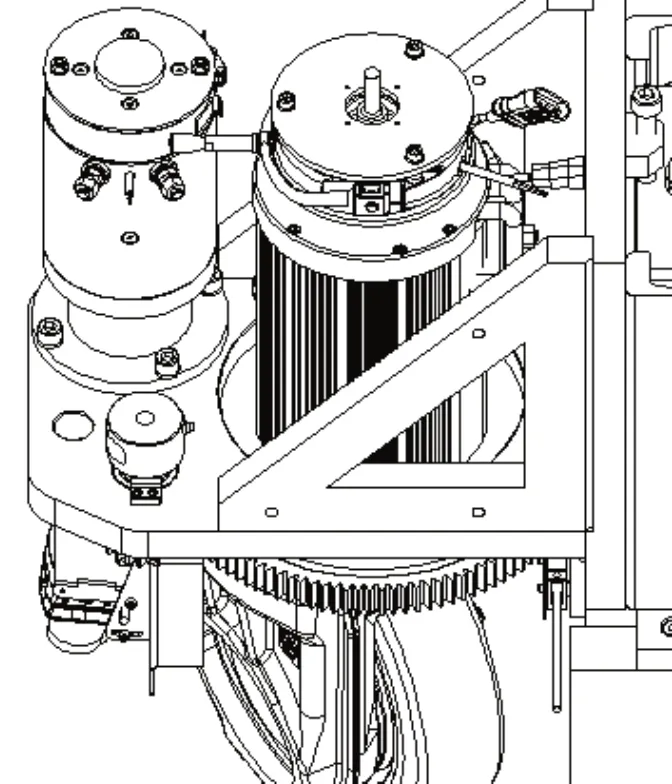
图5:驱动轮机构模块
二、滚筒型无介质停车AGV技术分析
滚筒型无介质停车AGV无需梳型架载车板等中间介质,可实现对汽车的直接存取。滚筒型无介质停车AGV采用“夹持机构”、“车载滚筒”和“AGV车体”三者同步配合的方式实现原地对汽车的直接搬运,对汽车车轮和底盘没有损害。
1.滚筒型无介质停车AGV的方案介绍
滚筒型无介质停车AGV(如图4)由AGV控制单元、载车控制单元、AGV机械车体等三大单元组成。滚筒型无介质停车AGV使用四舵轮驱动总成及激光、SLAM导航技术,AGV在运行过程中可实现前进、后退、转弯、自旋、横移、原地掉头等功能。最大运行速度90m/s,可满足停车AGV的实际需求。
AGV控制单元是AGV的基本组成,AGV控制单元由导航模块、导引模块、运动控制模块、通信模块、调度模块等组成。导航模块是AGV的眼睛,实现AGV位置坐标的获取。滚筒型无介质停车AGV采用激光导航、SLAM导航、磁钉导航三种导航方式,配合先进陀螺仪模块,定位精度在±5mm以内。导引模块完成AGV轨迹的运行跟踪,实现了:
直线方程:
圆方程:

四次方曲线方程:

B-spline曲线:
等运动轨迹的跟踪。运动控制模块采用Can总线控制电机速度和位置。Can总线协议最早是为了统一汽车车载设备间通信的标准而开发的协议,后来由于其高速、稳定、可靠等特点,已经被ISO标准化并广泛应用于工控、医疗等领域,目前依然是欧洲汽车网络的标准协议。滚筒型无介质停车AGV使用Canopen标准协议CIA402进行先进的运动控制,使用2.4GWifi实现AGV和调度系统之间的高速通信,同时接收调度系统下发的点、段等路径信息,发送AGV自身位置的坐标、状态信息给调度系统。
载车控制单元实现载车机构的功能控制,载车控制单元由滚筒控制模块和夹持机构控制模块组成。滚筒控制模块包括转轴、筒体、滚筒伺服电机、伺服电机驱动器等组成,先进的伺服电机保证了滚筒运动的精准,控制精度保证在±1mm。夹持机构控制模块由前后加持机构、伺服电机、伺服电机驱动器等组成。
AGV机械车体是AGV的基础部分,是其他总成部件的安装基础。AGV机械车体由底盘车架模块、驱动轮机构模块(如图5)、载车机构模块等组成。AGV车体(如图6)有4个高强度的低重心底盘,底盘装配了4组带浮动机构的舵轮模块及万向轮,使得AGV最大载重3吨。滚筒包括转轴和筒体,转轴和筒体转动连接,转轴的两端分别与中梁和挡边固定连接,筒体上设有链轮,相邻筒体上的链轮之间通过链条连接,以使多个滚筒同步转动。

图6:滚筒型无介质停车AGV车体
2.滚筒型无介质停车AGV的电气设计
滚筒型无介质停车AGV由主控制、通信模块、舵轮行走驱动器及电机、舵轮转向驱动器及电机、前后夹持机构伺服驱动器及电机、滚筒伺服驱动器及电机、数字IO、声光语音报警模块、导航激光传感器、避障传感器、手持器、显示器等模块组成。主控器是AGV的核心机构,包含导航模块、引导模块、通信模块、电机控制模块等。
3.滚筒型无介质停车AGV存取车流程
滚筒型无介质停车AGV通过“夹持机构”、“车载滚筒”和“AGV车体”三者之间的精准控制实现对汽车的原地夹取,其取车流程如图7,存车流程则相反。
4.滚筒型无介质AGV创新点
(1)无介质停车
滚筒型无介质停车AGV采用“夹持机构”、“车载滚筒”和“AGV车体”三者同步配合的方式实现对汽车原地直接搬运,搬运过程不需要梳型架、载车板等搬运介质的参与,滚筒型无介质停车AGV属于停车搬运机器人的第三代产品,其先进的搬运方式开创了“无介质停车AGV”的新时代。
(2)导航方式精度高
滚筒型无介质停车AGV支持激光导航、惯性导航和SLAM等多种导航技术。SLAM导航技术不需要地面布置反射板,可通过感知自然环境实现精准导航,特别是惯性导航技术的引入,使得滚筒型无介质停车AGV的导航、导引精度都在±5mm以内。
(3)无需安装轨道
滚筒型无介质停车AGV不需要地面铺设机械、电磁、磁带等传统轨道,通过感觉周围环境提取特征点,配合自然导航算法进行无轨道导引。
(4)全向运动
滚筒型无介质停车AGV采用了4个全方位驱动舵轮,可实现前进、后退、转弯、平移、侧移、自旋、原地掉头、Spline曲线等多种运动方式。
(5)速度快
自主研发的4个舵轮机构效率高、动力足,最大速度可达1.5m/s,最先研发的二代驱动可使速度高达3m/s。
(6)载重大
高强度的低重心底盘,底盘装配4组带浮动机构的舵轮模块及万向轮,平均载重2.8吨,最大载重3吨,适合市面上98%的车型。
(7)车库楼层低、节省建筑成本
滚筒型无介质停车AGV底盘高度110mm,但梳型停车AGV底盘高度320mm,台板型AGV底盘和载车板总高度385mm。滚筒型无介质停车AGV车库可以使每层停车楼高降低至少210mm,节省建筑成本8%左右。
(8)入口、出口分离,提高效率
无介质停车技术的引用,使得出入口的配置简单、成本低廉,存入取出口的分离、多取车口的配置,使得存车效率提升30%左右,取车效率提升50%左右。
(9)不破坏地面,施工快
不需要载车平台、梳型架、反射板等,对地面无损害,可以随时改变停车位的分布,灵活摆放汽车,适应复杂的停车环境。
(10)技术先进成本低
新技术、方案的引入,使得AGV机器人的存取车效率大幅度提高,成本反而降低,能有效解决停车难、停车慢等问题。
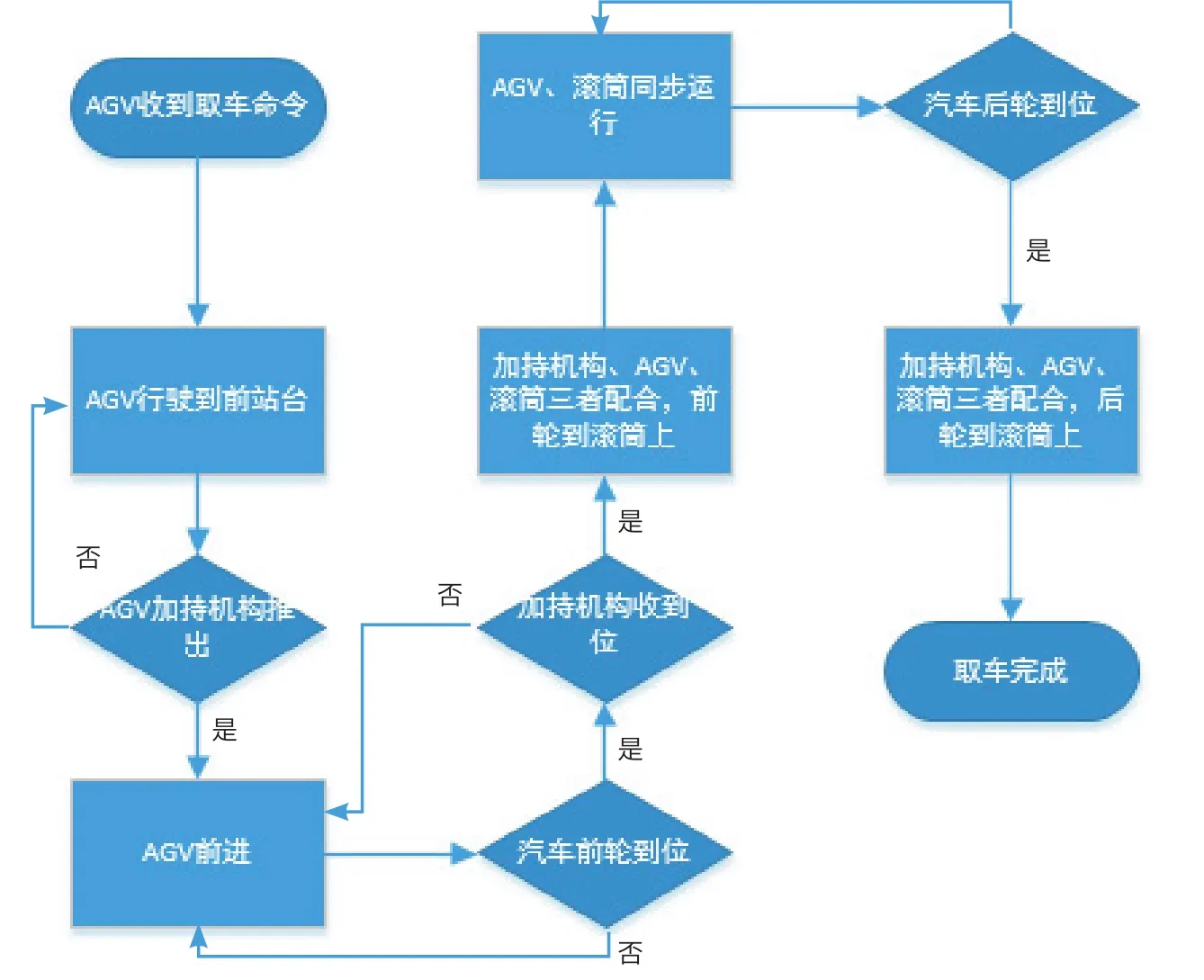
图7:取车流程图
三、结束语
滚筒型无介质停车AGV的应用,场地施工量大幅减少,使得传统停车场的改造和新停车场的建设周期缩短,车库能快速地投入使用。配合高精度的激光导航、惯性导航、SLAM导航技术,以及全方位运行能力、高达1.7m/s的运行速度、无介质存取车等特色技术,可以随时改变停车位的分布,灵活摆放汽车,能适应复杂的停车环境,缩短建筑高度210mm左右,有效降低车库系统成本15%左右、车库建造成本8%左右,相对传统停车场的车位数提高30%左右。无介质停车技术的引用,使得出入口的配置简单,成本低廉,存入/取出口的分离、多取车口的配置,使得存车效率提升30%左右,取车效率提升50%左右。新技术、方案的引入,使得滚筒型无介质停车AGV机器人在存取车效率上大幅度提高,成本反而降低,能有效解决停车难、停车慢等问题。
猜你喜欢
幼儿教育(2022年10期)2022-10-28
幼儿教育·父母孩子版(2021年6期)2021-08-05
甘肃农业大学学报(2021年3期)2021-07-19
建筑与装饰(2020年18期)2020-10-20
汽车画刊(2020年5期)2020-10-20
农业工程(2020年3期)2020-06-11
祝您健康·文摘版(2020年3期)2020-04-09
幼儿教育·教育教学版(2019年9期)2019-02-02
船海工程(2018年1期)2018-03-01
现代家长(2018年11期)2018-01-05
