
硬件在环汽车驾驶模拟器系统开发
2019-09-10 07:22孙荣强陈焕明刘大维
青岛大学学报(工程技术版) 2019年2期
孙荣强 陈焕明 刘大维

摘要: 为提高硬件在环仿真过程中实时监控的精度,本文基于xPC Target实时仿真实验平台,开发了硬件在环汽车驾驶模拟器系统。采用Matlab/Simulink软件,对车辆参数和道路环境等进行配置,搭建仿真模型,同时结合转向盘转角传感器、制动/油门踏板传感器和数据采集卡等硬件设备,实现外部硬件对虚拟车辆运动的控制,完成相关硬件在环仿真实验。以某型轿车为例,在平坦标准道路上的转向性能进行模拟,对驾驶模拟器系统的性能进行测试。实验结果表明,该系统的实时性和精度满足汽车动力学仿真实验的要求,为研究和开发驾驶辅助系统提供了实验平台,具有广阔的应用前景。
关键词: 驾驶模拟器; xPC Target; 硬件在环; veDYNA
中图分类号: U467; TP27文献标识码: A
随着汽车工业的迅猛发展,汽车从设计到进入市场,周期越来越短,而设计研发需要耗费大量的精力物力,特别是实车实验,不仅危险而且十分复杂。硬件在环仿真作为一种实时仿真技术已经被广泛应用于汽车研发过程,硬件在环仿真是将外部实物通过计算机接口嵌入到软件环境中,代替一些难以用数学模型描述的问题,提高仿真精度[13]。基于驾驶模拟器的硬件在环试验台,利用计算机仿真及电子、控制等相关技术,许多研究者从人-车-路“闭环系统”整体性能出发[4],对驾驶员行为和道路环境等进行仿真研究。B.A.Güvene等人[5]利用dSPACE、xPC TargetBox、Vehicle Simulator和工控机等开发了一套车辆硬件在环控制系统,并利用其对车辆偏航稳定性控制器进行控制效果的评估;王野等人[6]基于dSPACE实时仿真系统,利用Controldesk和Matlab开发实验台监控程序,通过典型工况对硬件在环实验台进行功能验证;李幼德等人[7]基于dSPACE实时仿真平台,以CarSim/Simulink联合仿真,搭建驾驶模拟器系统,实现各种模拟实验条件,对驾驶员制动意图模型进行训练和开发;李升波等人[8]搭建了基于xPC的驾驶员辅助系统硬件在环仿真实验台,以模块化思路建立仿真模型,采用S函数驱动主界面方法,解决了硬件在环仿真过程进行实时监控的问题。基于此,本文选用xPC Target作为实时平台,由veDYNA软件提供车辆各部分动力学模型,设计开发了汽车驾驶模拟器硬件在环仿真系统。该研究为车道偏离辅助系统等开发提供了仿真平台。
1 硬件在环汽车驾驶模拟器系统组成及工作原理
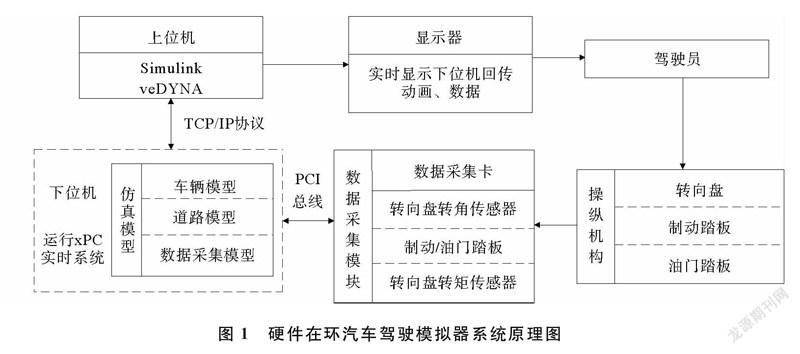
硬件在环汽车驾驶模拟器系统原理图如图1所示。系统主要由上位机、显示器、下位机、操纵机构、仿真模型和数据采集模块组成。
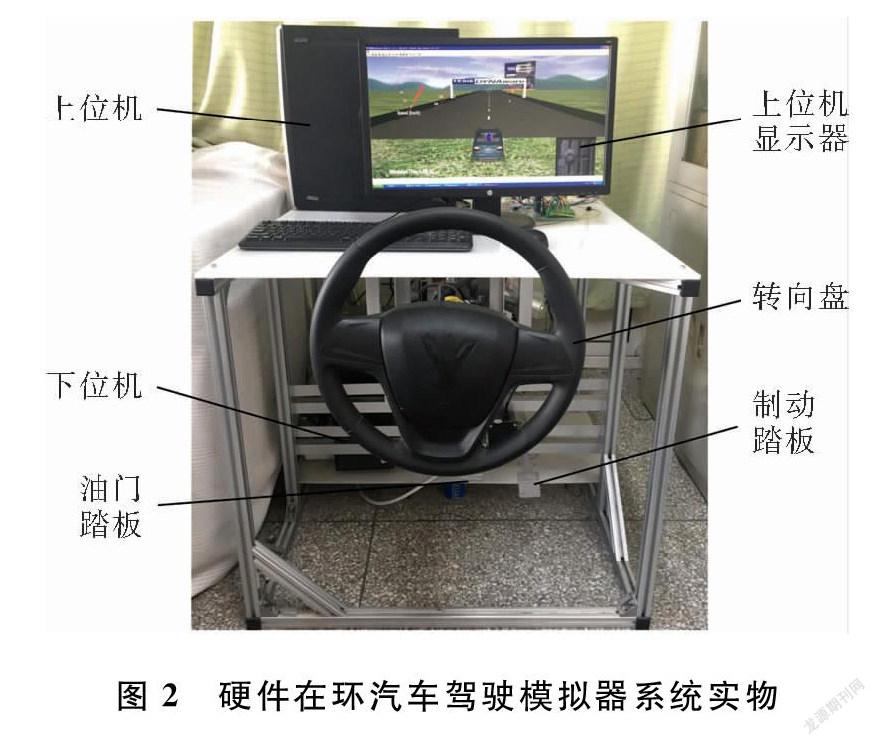
利用veDYNA、Matlab/Simulink软件,硬件在环汽车驾驶模拟器的上位机对车辆参数和道路环境等进行配置,搭建仿真模型,采用Simulink中RTW工具箱进行编译,通过TCP/IP通信协议传输到xPC实时系统的下位机。仿真模型在下位机中实时运行,仿真结果以动画、曲线等形式实时回传到上位机[9]。驾驶员根据仿真结果,通过转向盘、制动/油门踏板等操纵机构对虚拟车辆进行实时控制。数据采集模块中,转向盘转角传感器等将驾驶员的操纵转变为电信号,通过PCI6070E数据采集卡的A/D通道传输到下位机中,对仿真模型进行实时运算,从而实现外部硬件对虚拟车辆运动的控制,完成相关的硬件在环仿真实验。硬件在环汽车驾驶模拟器系统实物如图2所示。
2 硬件在环汽车驾驶模拟器硬件系统
2.1 上位机及下位机系统
上位机及下位机系统由两台PC机通过xPC Target硬件在环仿真工具配置而成,通过TCP/IP通信协议进行数据传输。上位机采用惠普Compaq dc7800型计算机,CPU主频为2.7 GHz的Intel Pentium(R)处理器,内存4 GB;下位机采用惠普Compaq dc7700型计算机,CPU主频为2.13 GHz的Intel Rore(TM)Ⅱ处理器,内存4 GB。
2.2 数据采集模块
数据采集模块由数据采集卡、转向盘转角传感器、油门/制动踏板传感器和转矩传感器组成。数据采集卡采用美国NI公司生产的PCI6070E型号,该采集卡功能丰富、采集速度快、准确率高,并支持DMA和双缓冲两种传输方式,保证了实时信号的不间断采集和存储。数据采集卡提供了16路单端/8路差动输入通道、2路独立的D/A输出通道、8线的数字I/O、2个24位的定时器/计数器等多种功能,高效可靠地完成数据采集,将下位机与转向盘、制动/油门踏板等外部设备连接,通过A/D通道将采集到的转向盘转角信号、油门/制动踏板信号和转向盘转矩信号转换成数字信号传输到计算机中进行仿真运算[10]。
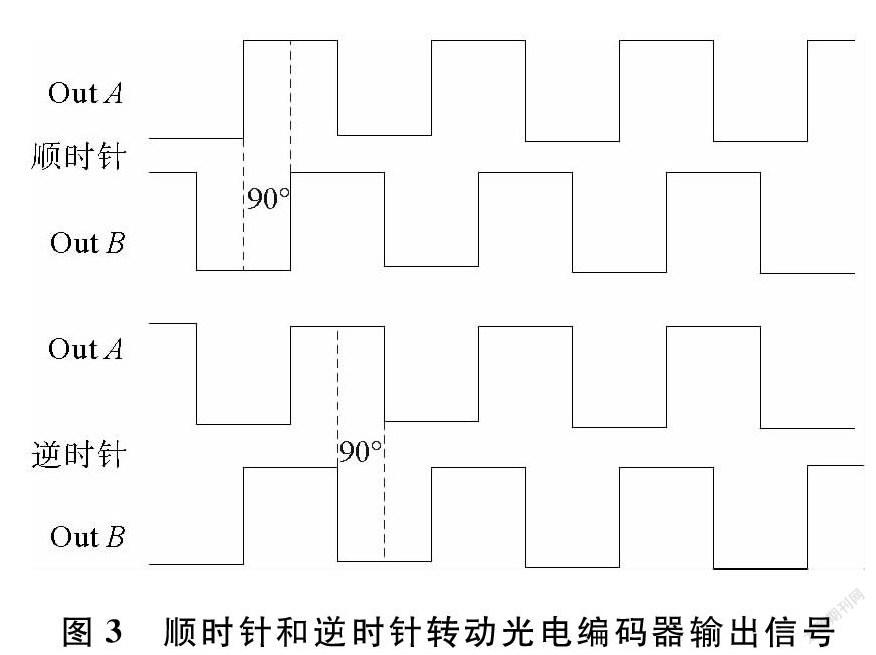
转向盘转角传感器采用ZKT6012光电式旋转编码器,与转向盘同轴连接,输出转向盘转角信号,准确地将驾驶员对转向盘的输入转换为计算机可识别的电信号。该编码器体积小、重量轻、安装方便,分辨力为14.4,具有较高的测量精度[11]。光电式旋转编码器输出OutA和OutB两路正交信号和一路零位信号,实现双向计数,适合进行转向盘转角的测量。当转向盘顺时针旋转时,OutA通道信号超前OutB信号1/4T相位,逆时针旋转时则相反。顺时針和逆时针转动光电编码器输出信号如图3所示。
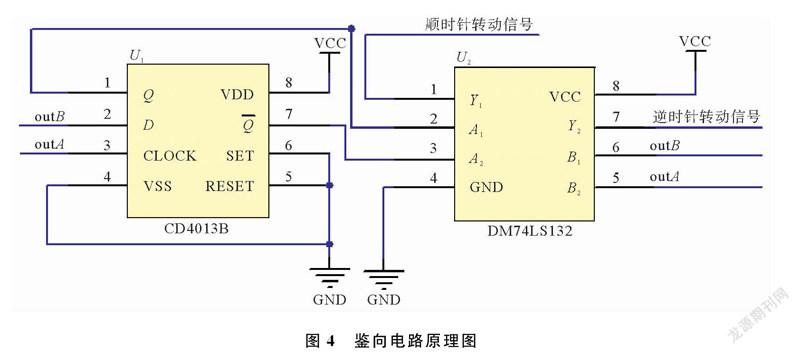
将光电编码器输出的两路信号输入到鉴向电路中,鉴向电路根据输入信号的相位差判断转向盘的旋转方向。鉴向电路由D触发器CD4013B和与非门DM74LS132组成,鉴向电路原理图如图4所示。当转向盘顺时针转动时,Y1端口输出脉冲信号,Y2端口没有脉冲信号输出[12];当转向盘逆时针转动时,Y2端口输出脉冲信号,Y1端口没有脉冲信号输出。
油门和制动踏板采用三佑公司JKH503型电子脚踏板,踏板转动角度最大为30°,准确反映驾驶员对车辆的纵向动力学控制。踏板内部基于霍尔式传感器,结合控制电路,只需提供+5 V电平便可输出与踩踏角度成正比关系的0~+5 V连续变化的模拟信号,信号可直接通过数据采集卡的A/D端口输入计算机进行处理[13]。
转向盘转矩传感器采用余航YH502系列扭矩传感器,该传感器采用应变片电测技术,在弾性轴上组成应变桥,在应变桥两端施加电压即可测得该弾性轴所受扭矩的电信号。信号放大后,经过压/频转换,得到与扭应变成正比的频率信号,信号可直接通过数据采集卡的A/D端口输入计算机进行处理,计算出驾驶员对转向盘的输入转矩[14]。
3 硬件在环汽车驾驶模拟器软件系统
3.1 车辆动力学模型
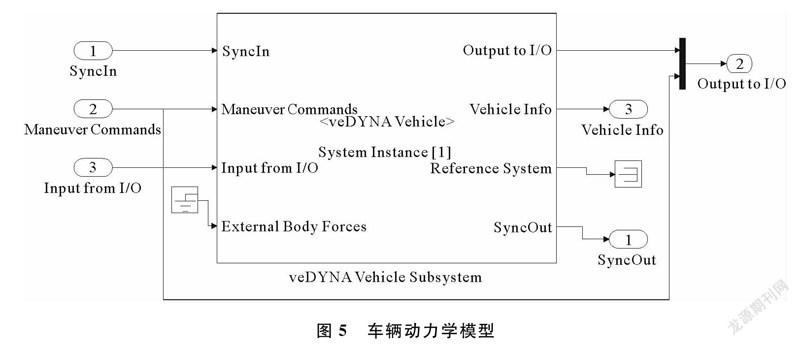
在Simulink环境下,车辆动力学模型如图5所示。该模型基于车辆动力学软件veDYNA中Standard结构的车辆动力学模型,采用模块化建模方式,集成了转向/制动系统模块、发动机系统模块及轮胎模块等[15],根据仿真改变各个参数,以适配仿真环境。本文所开发的硬件在环汽车驾驶模拟器,嵌入了转向盘转角Simulink模型和油门/制动踏板Simulink模型等,实现了驾驶员通过操纵机构对车辆的控制。
3.2 道路模型
在Simulink环境下,道路模型如图6所示。在veDYNA的车辆动力学主界面中,提供了标准模型和双向车道/高级模型两种道路模型的选择。标准道路模型可以提供最多15段车道,可分别设置不同道路的表面摩擦系数及坡度;双向车道/高级模型可以设置包括道路指示牌及前后车交通环境等在内的3D道路环境,提供了更加丰富的仿真实验环境[16]。
3.3 数据采集模型
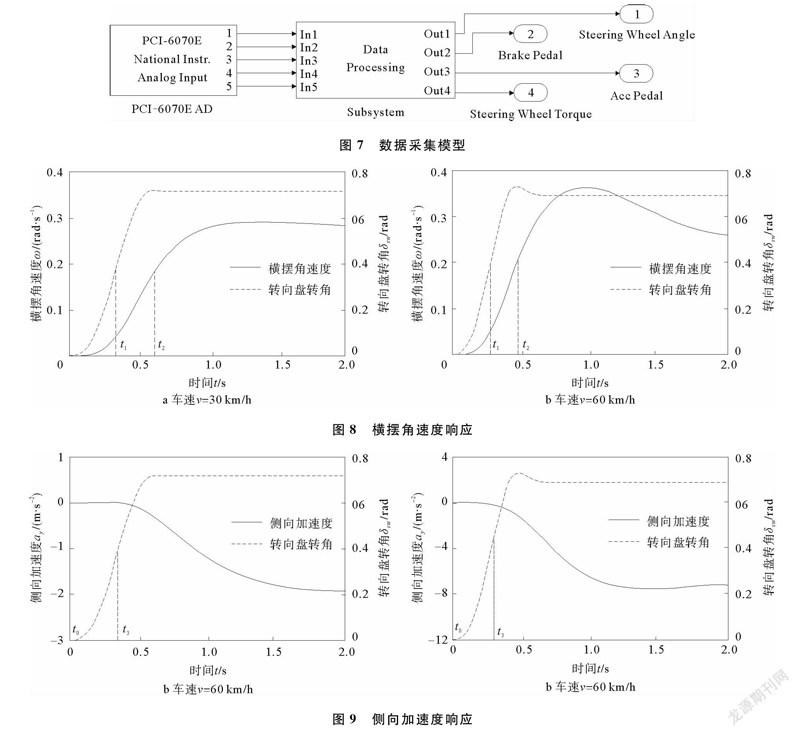
在Simulink环境中,搭建数据采集模型,数据采集模型如图7所示。该模型的作用是采集转向盘转角信号、油门/制动踏板信号和转向盘转矩信号。转向盘转角传感器、油门/制动踏板传感器和转向盘转矩传感器生成的电信号,通过PCI6070E AD模块转换为数字信号,由数据处理模块处理后,得到转向盘转动角度、油门/制动踏板踩踏角度和转向盘转矩,传输到车辆动力学模型,实现外部操纵机构对虚拟车辆的转向及加/减速等控制[17]。
4 硬件在环汽车驾驶模拟器系统测试
为测试该系统的性能,以某型轿车为例,在平坦标准道路上行驶时的转向性能进行模拟。首先在上位机中的车辆动力学软件veDYNA中设置车辆参数和道路环境等,搭建仿真模型,车辆以30 km/h和60 km/h的车速行驶时,驾驶员通过转向盘实时输入阶跃转向信号,在下位机中实时计算车辆的横摆角速度和侧向加速度响应,并将结果传输到上位机进行记录分析[18]。车辆横摆角速度和侧向加速度响应曲线如图8和图9所示。
5 结束语
本文基于xPC Target实时仿真实验平台,结合车辆动力学仿真软件veDYNA,开发了硬件在环汽车驾驶模拟器系统。采用Matlab/Simulink软件,对车辆参数和道路环境等进行配置,搭建仿真模型,通过数据采集卡采集转向盘转角传感器、油门/制动踏板传感器和转矩传感器等信号,实现外部硬件对虚拟车辆运动的控制。经过实验测试表明,该系统运行稳定,实时性好,满足汽车动力学仿真实验的要求,可作为驾驶辅助系统的仿真平台。
参考文献:
[1] Maroteaux F, Saad C. Diesel engine combustion modeling for hardware in the loop applications: Effects of ignition delay time model[J]. Energy, 2013, 57(8): 641652.
[2] 邓涛, 孙冬野, 秦大同, 等. 基于Simulink与veDYNA联合仿真平台的AMT硬件在环试验研究[J]. 汽车工程, 2011, 33(5): 411416, 421.
[3] 吴志敏. 硬件在环技术在汽车上的应用研究[J]. 科技视界, 2013(19): 9091.
[4] 丁立, 熊坚, 陈泽林, 等. 面向人车环境系统的汽车驾驶模拟器的开发和应用[J]. 公路交通科技, 2002, 19(6): 160163, 171.
[5] Guvenc B A, Guvenc L, Karaman S. Robust yaw stability controller design and hardwareintheloop testing for a road Vehicle[J]. IEEE Transactions on Vehicular Technology, 2009, 58(2): 555571.
[6] 王野, 李刚. 驾驶模拟器硬件在环制动试验台开发[J]. 汽车实用技术, 2016(12) : 4549.
[7] 李幼德, 刘巍, 李静, 等. 汽车稳定性控制系统硬件在环仿真[J]. 吉林大学学报: 工学版, 2007, 37(4): 737740.
[8] 李升波, 王建强, 李克强. 基于xPC的驾驶员辅助系统硬件在环仿真试验台[J]. 中国机械工程, 2007, 18(16) : 20122015.
[9] 杨涤. 系统实时仿真开发环境与应用[M]. 北京: 清华大学出版社, 2002.
[10] 刘中富. 虚拟仪器技术在海军靶场的应用研究[D]. 杭州: 浙江大学, 2006.
[11] 杨财, 周艳霞. 方向盘转角传感器研究进展[J]. 传感器与微系统, 2007, 26(11) : 14.
[12] 杨新红, 高峰, 王国富, 等. 基于TESIS DYNAware的车辆巡航虚拟试验研究[J]. 机械工程学报, 2011, 47(20): 165170.
[13] 赵珂, 袁建州, 齐康, 等. 电子制动踏板在某款纯电动车上的应用[C]∥河南省汽车工程科技学术研讨会. 信阳: 河南省汽车工程学会, 2016: 383384.
[14] 李嫩. 基于ADSL驾驶模拟器的横摆角速度硬件在环仿真系统[D]. 长沙: 湖南大学, 2005.
[15] 武志杰, 郭洪艳, 柳致海, 等. 基于xPC Target的汽车动力学HiL仿真系统设计[J]. 控制工程, 2011, 18(4): 610613.
[16] 王伟, 吴超仲, 严新平, 等. 汽车驾驶模拟器动力学仿真建模[J]. 武汉理工大学学报: 信息与管理工程版, 2005, 27(1): 135138.
[17] 李胜琴, 赵立. 基于Simulink的某型車转向特性分析[J]. 小型内燃机与车辆技术, 2014(4): 4448.
[18] 房丽爽, 郭洪艳, 陈虹. 汽车动力学HiL仿真实验平台的搭建及应用[J]. 控制工程, 2015, 22(3): 375381.
[19] 中国汽车技术研究中心. GB/T6323. 2—1994汽车操纵稳定性试验方法[S]. 北京: 中国标准出版社, 1994.
[20] 余志生. 汽车理论[M]. 5版. 北京: 机械工业出版社, 2009.
