一种锂电池正极材料生产用双钵翻转设备研制
2019-09-10 07:22石秀彬李远安杨波汪训浪
信息技术时代·上旬刊 2019年4期
石秀彬 李远安 杨波 汪训浪



通过双钵翻转设备研制,对双钵翻转传动系统、密封结构及材料、精确定位系统、以及电气控制系统多个方面进行了设计和改进,从而满足高产能、快节拍、高密封性的锂电池正极材料生产工艺要求。
锂电正极材料;双钵翻转;180°翻转;定位设计
1引言
锂电正极材料作为电池材料的四大核心材料之一,制约着电池的综合性能。正极材料能继承前驱体的形貌和结构特点,所以前驱体的结构,制备工艺对正极材料的性能有着至关重要的影响。
从产值方面来看,据SPIR数据统计,2017年中国仅三元材料产值为175亿元,同比增长119%,2018-2019年新能源动力电池需求会持续增大。目前主流翻转卸料工位多采用电机翻转、气缸翻转、机械手翻转卸料方式。国外厂家如日本则武、日本NGK等。日本设备优点显著,性能优越,但缺点突出,如:设备售价较高,维修性差且易受中日国际形势影响。国内厂家多无经验积累,多为国外厂家代工。在日益提高的产能需求中,国外设备仍保持选择单钵翻转机构,单钵节拍最快可达45s,仍不能满足生产需求。快节拍,高产能仍然是各方面的共同需求。
2双钵翻转主体结构设计
本文研制的是一种锂电池正极材料生产用双钵翻转设备,主要包括密封门系统、传动系统、翻转定位系统和阻挡到位系统。本设备可单次有效翻转两钵,可有效将单钵处理节拍提升至20s,极大节省成本,提升生产效率,增加设备稳定性;同时贯穿无粉尘外泄、高密封性、杜绝铜铁锌等设计理念。
工作原理及动作:传输方向由左向右。密封门系统通过气缸打开密封门,阻挡到位系统及传动系统工作,阻挡到位系统为气缸驱动连杆结构,连杆伸出阻挡后,传动系统通过辊筒调速器驱动电动辊筒依次将载体送入翻转仓内,行程开关检测到载体到位后,密封门系统通过气缸驱动关闭密封门,翻转定位系统通过伺服电机控制器驱动伺服电机带动翻转盘翻转180°。翻转定位系统带有机械阻擋器,有效保证电机异常失效后,翻转机构处于安全位置。载体卸料完成后,翻转定位系统通过伺服电机控制器驱动伺服电机带动翻转盘反向翻转180°,阻挡到位系统工作,连杆结构缩回;传动系统及密封门系统工作,密封门系统通过气缸打开密封门,电动辊筒依次将载体送出翻转仓。
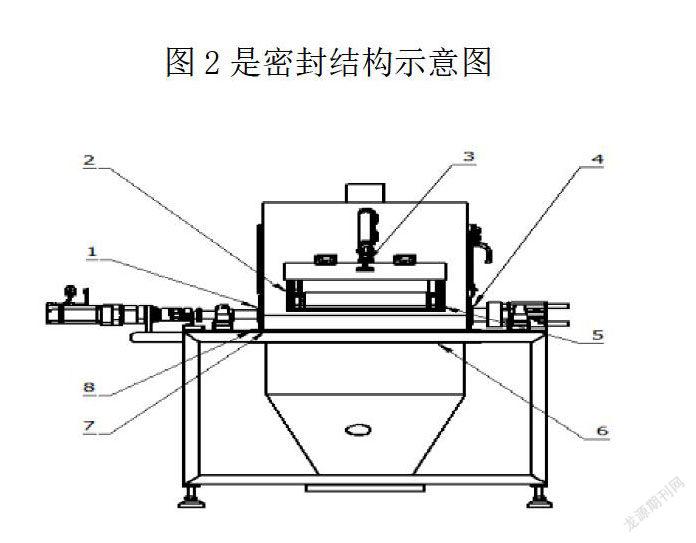
3、密封结构设计
锂电池正极材料物料粉尘粒径多处于2-10um范围内,具有极强的穿透性、腐蚀性和吸水性。国家对环境保护日益重视,污染、粉尘排放要求日益增高,故对设备密封性提出较高要求。
进出口门密封设计,主要考虑如何选用合适执行元件及机构,保证在预留匣钵进出口高度尺寸下,有效保证进出口的密封性,门密封主要涉及2、3、5。
拟采用气缸组件斜压门板挤压密封垫方式进行密封,斜压时,气缸对门板作用力分解为沿门板方向力F1和与门板垂直方向力F2。可知F2=F*Sinα,F2越大,挤压密封垫,密封性能越好,故结合实际情况,确定α角度为60°。
翻转定位系统密封设计,主要考虑密封罩、收料处与架体静态密封及如何有效保证定位,系统与密封罩动密封,主要涉及1、4、6、7、8。
静态密封处主要采用密封垫与法兰配合进行密封,动态密封处分别为主动端动密封主要采用毛毡密封圈,被动端密封主要采用骨架油封。
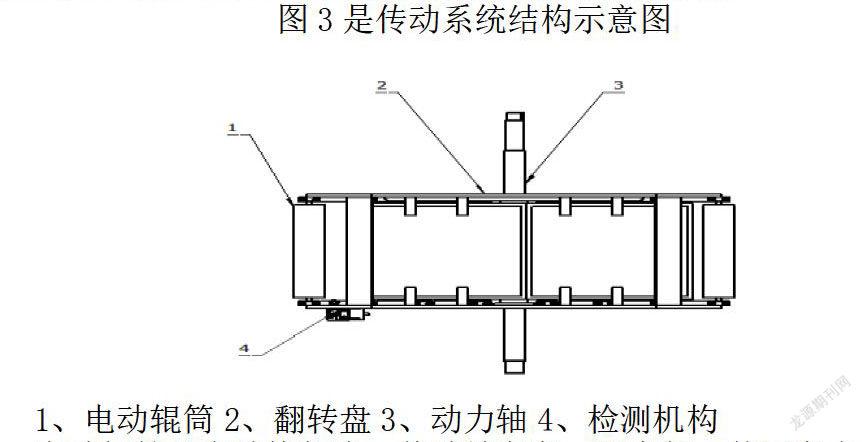
4传动系统与结构设计
由于锂电正极材料物料的高穿透性,选用执行元件时需考虑结构的实用性及密封性,有效保证执行元件的使用寿命。
电动辊筒具有结构紧凑、传动效率高、噪音低、使用寿命长、运转平稳、工作可靠、密封性好、占据空间小,安装方便等诸多优点,适合恶劣环境下工作。故拟选用电动辊筒为主要执行元件。
锂电正极材料对铜铁锌材质敏感,故翻转仓内与物料接触部分均采用SUS304喷涂PTFE或非金属材质,其中电动辊筒采用外表面包丁晴橡胶,传动轴采用SUS304镀铬来杜绝金属异物引入。
5翻转定位系统及结构设计
主流翻转卸料工位多采用电机、气缸、机械手等方式。气缸翻转较电机翻转结构复杂,故障率高。机械手翻转卸料密封性差、价格贵、节拍长。普通电机频繁启动、加速性能、控制精度等均远差于伺服电机,在此拟选用伺服电机对翻转机构进行翻转及精确定位。
定位板进行原点校准,载体到位后,伺服电机可通过定扭定速转动,有效缓解双钵翻转过程中惯量的不均匀性,对翻转的平稳性及精确定位精度有较大提高,伺服电机转速可根据实际需要进行调整,适用范围广。当出现异常断电或电机故障时,机械阻挡器将有效保护翻转定位系统,并防止造成进一步伤害。
6阻挡到位系统及结构设计
主流翻转系统关于载体到位定位功能性較差,日本则武采用气缸直接定位方式,国内各家多采用无动力自重下落方式或气缸阻挡夹持方式,均无法有效解决匣钵的到位问题,使用过程中故障仍频。执行器件在翻转仓内部时,会经受粉尘侵蚀,需要经常更换保养,且执行器件位于翻转仓内,拆卸不便;无动力自重下落式会导致载体到位异常频发,易造成载体脱落,机构损坏等故障。
为有效解决阻挡到位问题,降低故障发生频率,主要从以下两个方面进行设计:
a:选用气缸为执行器件,将执行器件与翻转仓内部隔离,减少粉尘对执行器件的侵蚀。
b:通过机械结构将执行器件位移与转盘转动相结合,并采用动密封,保证腔体密封。
即保证以下功能:转盘转动时,阻挡杆跟随转盘转动,进行阻挡,转盘回转时,阻挡杆通过气缸驱动推杆控制阻挡杆阻挡。通过执行器件与翻转仓隔离并增加机械连杆结构,可有效降低设备运转故障率。
7电气控制系统
锂电池正极材料生产用双钵翻转设备电器控制系统主要包括控制系统设计及软件系统设计两个部分。①控制系统:采用德国倍福嵌入式计算机控制系统,进行逻辑控制。② 软件系统:1、采用分级登录功能监控系统采取分级管理和登录机制。2、采用实时显示。3、采用报警信息提示。4、带有数据记录查看功能。
8总结
本文主要基于锂电正极材料实际生产需要翻转设备进行分析研发及设计。突破性的解决生产中存在的快节拍、高密封要求带来的问题。论述了研制的一种锂电池正极材料生产用双钵翻转设备,为打破国外的技术封锁,掌握具有自主产权的双钵翻转卸料机构,助力国产锂电正极材料开疆拓土有重大积极意义。
参考文献
[1]张江峰.2016年中国锂工业发展现状分析[J].新材料产业,2017(4).
[2]刘苏宁,孙宁磊,王霄,等.共沉淀法制备镍钴锰三元材料前驱体的研究进展与趋势[J].中国有色冶金, 2018(3).
作者简介:石秀彬(1992-),男,安徽淮南人,毕业于中国矿业大学(徐州),学士,机械设计制造及其自动化专业。
![]()
猜你喜欢
中国自行车(2021年3期)2021-07-06
发明与创新·中学生(2020年1期)2020-08-03
理论与创新(2020年9期)2020-07-14
科学与财富(2020年3期)2020-04-02
信息技术时代·上旬刊(2019年4期)2019-09-10
发明与创新·小学生(2018年7期)2018-08-06
科技与创新(2015年16期)2015-08-19
科技资讯(2015年7期)2015-07-02
中国高新技术企业(2015年16期)2015-04-30