基于S7—200SmartPLC伺服电机位置控制系统的应用
2019-09-10 07:22汪涛郎茂坤杨波
信息技术时代·上旬刊 2019年4期
汪涛 郎茂坤 杨波


随着工业4.0以及中国制造2025的提出,工业自动化的发展越来越迅速,对伺服电机的位置控制精度要求越来越高。本文基于一个西门子S7-200 Smart PLC与台达A2系列伺服的位置控制方法,以西门子S7-200 Smart PLC为控制单元,通过高速脉冲输出控制伺服驱动器,伺服驱动器带动电机运转,利用伺服电机上的编码器发出脉冲信号构成位置反馈,从而实现对电机的精确位置控制。
S7-200 Smart;伺服电机;高速脉冲;位置控制
1引言
本文是基于西门子小型PLC S7-200 Smart,此款PLC是一种编程简单,控制方便的可编程控制器,它提供了多种方式用于位置控制。本文将研究如何利用此款PLC实现对伺服电机运动位置较为精确的控制。
2控制系统简介
本文伺服控制系统主要由交流伺服电机、编码器和伺服驱动器。伺服控制系统的工作原理是伺服驱动器发送运动命令信号,驱动伺服电机运转,同时接收来自编码器的反馈信号,然后重新计算伺服电机运动位置,从而达到精确控制。本系统采用西门子S7-200 Smart PLC作为控制模块,用于需要高速脉冲驱动伺服电机,采用晶体管输出型,故选用CPU ST40 DC/DC/DC型PLC。伺服驱动器及伺服电机选用台达A2系列产品。
3系统硬件设计
3.1 硬件接线图
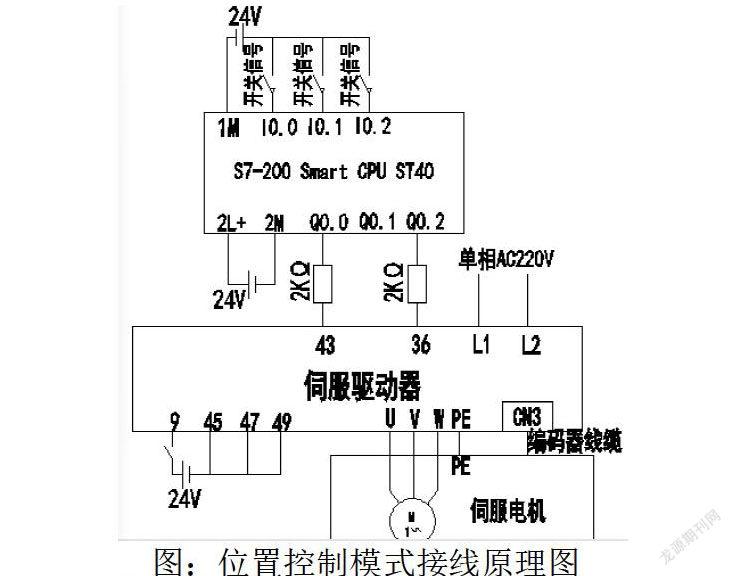
硬件接线图如下图所示;此硬件部分主要分为以下几部分:输入I/O信号,Smart ST40系列PLC、A2伺服驱动器、伺服电机。其中输入输出端子需要PLC PTO控制向导进行配置;同时在PLC的脉冲输出端需要接一个2K的电阻,主要用于降压限流,保护驱动器的输入信号。
3.2 PLC I/O分配表
I/O分配表如表所示:Q0.0用于发送脉冲信号,控制电机的转速及定位位置;Q0.1用于接入伺服使能型号;Q0.2用于控制伺服电机的运转方向;I0.0接入左限位开关(LMT+),I0.1接入右限位开关(LMT-),I0.2接入参考点位置开关(RPS)。
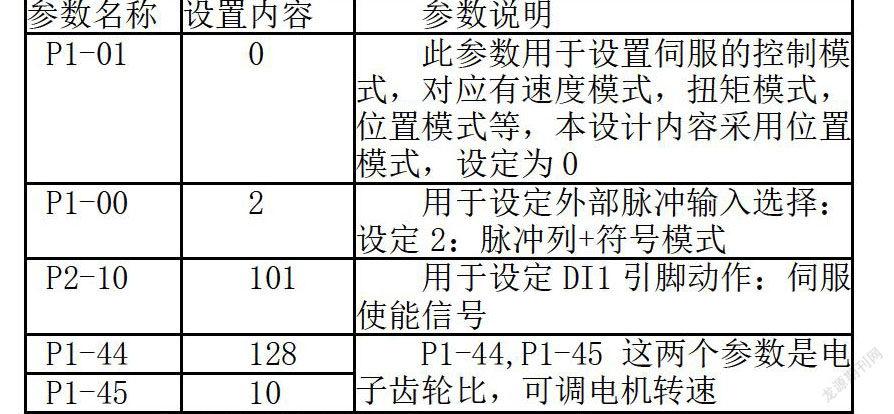
3.3 伺服控制器参数设置
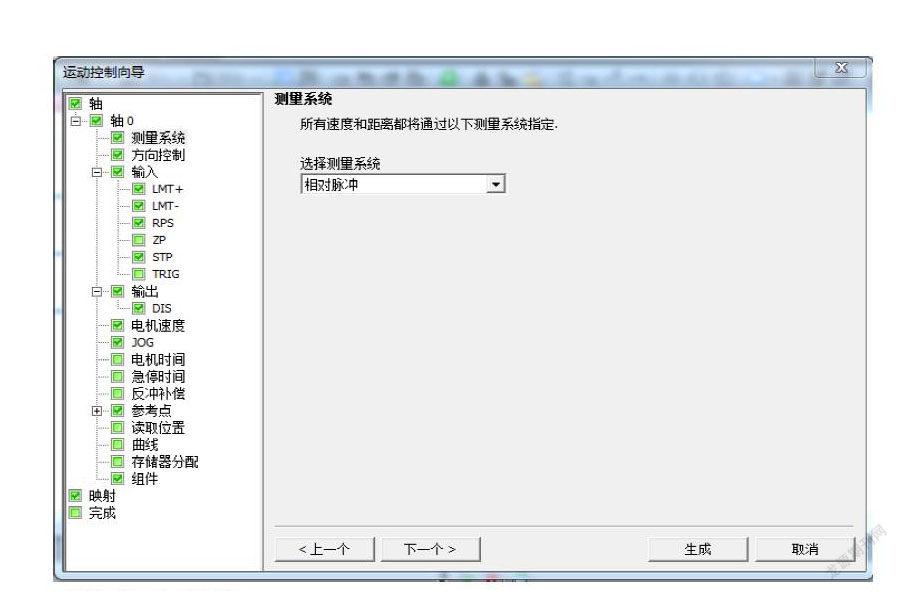
3.4 PLC运动控制向导配置
4系统程序设计
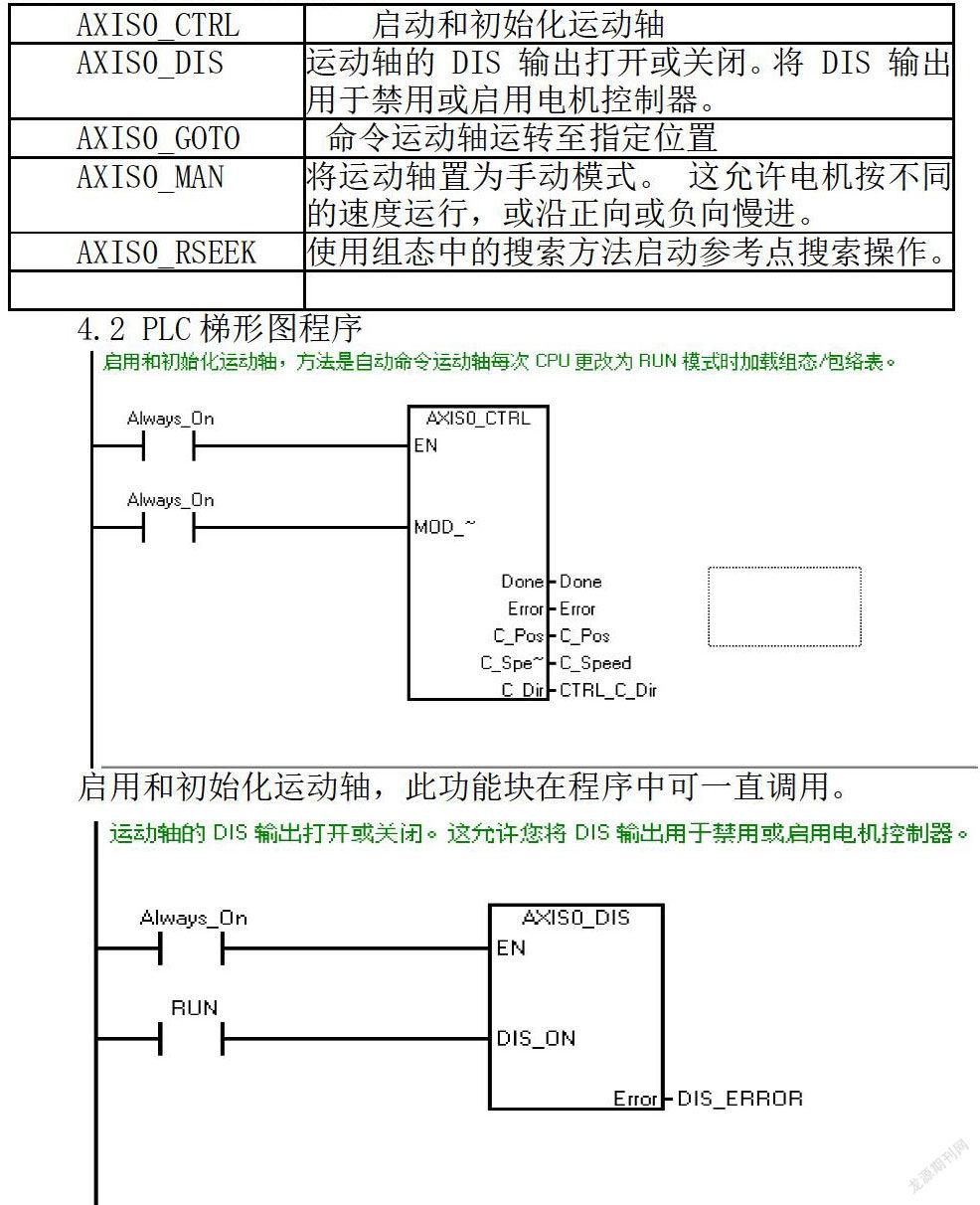
4.1 PLC运动控制子程序简介
根據3.4运动向导生成11个功能各不相同的运动控制子程序,为了减少程序占用的空间,按照程序设计需求灵活配置运动子程序;主要子程序介绍如下:
4.2 PLC梯形图程序x
4.3 案例程序设计
5总结
通过本文可以看到,西门子S7-200 Smart运动控制指令向导,简单方便的实现了对伺服电机的位置控制,本设计结构简单、成本低、定位精准,为小型PLC与伺服控制系统在位置控制领域相结合提供了有益参考。
参考文献
[1]廖常初. PLC编程及应用[M].北京:机械工业出版社,2015
[2]吉顺平.可编程控制器应用及原理 .北京:机械出版社,2011
作者简介:汪涛(1988-),男,安徽合肥人,毕业于安徽建筑大学,学士,自动化专业。
猜你喜欢
科技研究·理论版(2022年4期)2022-07-15
发明与创新·中学生(2020年1期)2020-08-03
发明与创新·小学生(2018年7期)2018-08-06
科学与财富(2018年34期)2018-01-15
都市家教·下半月(2017年6期)2017-08-22
科技创新与应用(2017年14期)2017-05-19
中国科技纵横(2017年3期)2017-03-29
科技与创新(2017年5期)2017-03-28
电子设计应用(2004年6期)2004-07-27