一种锂电池正极材料生产用翻转清扫一体化设备研制
2019-09-10 07:22宋超汪训浪石秀彬
信息技术时代·上旬刊 2019年4期
宋超 汪训浪 石秀彬




在锂电池正极材料自动化生产线中,对卸料后匣钵的残余粉料清扫是其中不可或缺的一道工序。为实现清扫和倒残料在单工位上双个功能的整合,本文从设备整体布局、部件结构设计、相关参数确定等方面,较全面地介绍了翻转清扫一体化设备的研制思路以及实际使用中可能出现的问题。所设计的翻转清扫设备布局紧凑、结构合理、工作可靠、能够有效降低成本,可完全满足自动化生产的工艺要求。
粉料;匣钵;翻转;清扫;自动线
引言
随着锂电池在新能源行业的大量生产和广泛应用,锂电池正极材料的需求也在日益增多。目前锂电池行业正极材料的生产制备均需通过电子窑炉烧结工艺来达到特定的性能要求,而在烧结前需要将粉体物料装入到方形匣钵内,然后通过配套的循环生产线输送到各个工位实现连续的自动化生产。其中装载粉料的匣钵在烧结并完成卸料后依然会有部分残余粉料依附于钵内壁面上,若不加以清扫处理,会对后道检测以及粉料烧结质量产生不良影响。对于流动性较好的粉料常采用气吹清扫方式,而对于流动性差易粘壁的粉料清扫问题则难以解决:目前大部分都需人工取下清扫,工作效率低、粉尘污染大;或采用毛刷清扫工位+翻转倒料工位的组合形式,配置繁复,设备成本高。因此,亟需开发一种结构紧凑、集成度高的翻转清扫一体化设备,实现高效清洁匣钵,同时回收残留粉料的目的。
1.翻转清扫设备在自动化生产线中的配置和相关技术参数
1.1 自动化生产线整体配置
用于锂电池正极材料的烧结窑炉较为典型的配套自动化生产线设备配置主要包括:上料工位、卸料工位、两组升降机、清扫工位以及带缓存功能的输送线体(如下图1所示)。对于不同物料的不同工艺要求,还会配置生/熟料切块、摇匀、分叠钵等工位,此处不作细述。其中,清扫工位配置是用于清扫并回收卸料后匣钵内的残存粉料。
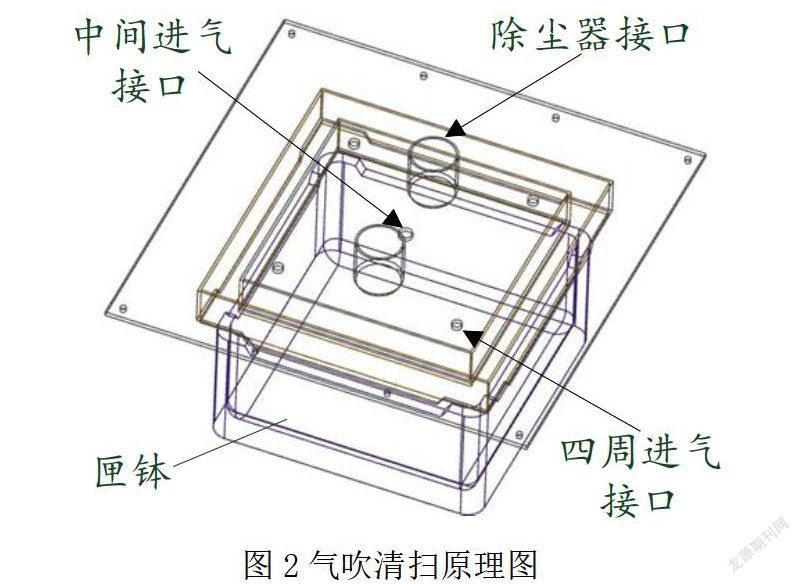
如引言中所述,对于磷酸铁锂、钛酸锂等流动性较好的粉料目前常采用气吹清扫的方式,其原理是通过仿型回字压蓋将顶起后的匣钵压紧密封,然后在盖板四周及中间5处进气点通入压缩空气,形成整体螺旋式吹气,最后高压除尘风机将残料从除尘接口抽至除尘布袋中回收。其原理示意图如下图2所示:
对于高镍三元系正极材料其流动性较差,卸料后容易出现粘壁现象,气吹无法到达清洁目的。目前解决这一技术问题相对高端的方式是采取多自由度机械臂将匣钵搬离线体至独立的清扫装置进行清扫、倾倒和收集残料,但相应地大幅增加了设备成本,且难于保证防尘、密封。较常规的方式则是配置毛刷清扫工位先将残料从钵壁刷落,然后至后续翻转倒料工位倾倒回收,双工位配置较为繁复。故本文基于此对清扫和倒残料在单工位上进行两个功能的整合,实现设备的一体化,以精简设备配置,提高经济性。
1.2 翻转清扫一体化设备相关技术参数
(1)匣钵外形尺寸:320*320*150(带豁口)
(2)匣钵重量/粉料装载量: 8kg/7 kg
(3)设备主体长*宽*高:1832*1265*1450mm
(4)设备总功率:1.5KW
(5)线体传输速度:约10m/min
(6)工位处理节拍:45S
(7)废料残余率:≤5%
(8)传动方式:电动辊筒,直径Φ60mm
(9)翻转驱动:带抱刹伺服电机+配套减速器
(10)清扫件:普通电机+定制毛刷
(11)清扫升降装置:同步带-滑轨式直线模组
(12)升降行程:200mm
(13)翻转仓密封方式:斜压式密封自动门
(14)设备稼动率:≥98%
2.工序流程分析及结构设计要点
2.1 设备的工序流程分析
按照翻转清扫设备预实现的功能要求,其工序流程应包括如下步骤:
S1:卸料完毕后的匣钵通过前置输送线体经进口仓门被送入翻转仓内。
S2:行程开关检测匣钵到达预定位置后被阻挡,夹持机构将匣钵夹紧限位。
S3:旋转驱动装置带动翻转盘翻转180°使匣钵倒扣(带机械限位避免掉钵)。
S4:清扫组件升到高位,电机带动毛刷旋转清扫匣钵内壁。
S4:清掃完毕后,清扫组件降至低位,匣钵翻转复位,阻挡夹持松开。
S5:匣钵通过后置输送线体经出口仓门被送至下一道工序。
2.2 设备结构设计要点
(1)在翻转卸料设备基础上对翻转装置及传动结构优化,使翻转盘总体尺寸更小,保证清扫组件有足够的升降高度和安装空间。
(2)如何实现匣钵的阻挡、夹持和翻转的一系列动作,且在翻转清扫过中不会发生匣钵掉落和窜动现象。
(3)清扫及升降设计:在工作面高度885mm限制的前提下,如何实现清扫组件低位避让匣钵翻转、高位毛刷清扫的功能要求。同时在高粉尘环境下其结构可靠性也很关键。
(4)设备整体的密封和防尘措施:需做好固定件与运动件之间的密封,防止粉尘污染避免匣钵清扫过程中造成粉尘飞扬外溢等。
3.设备主要结构的分析与设计
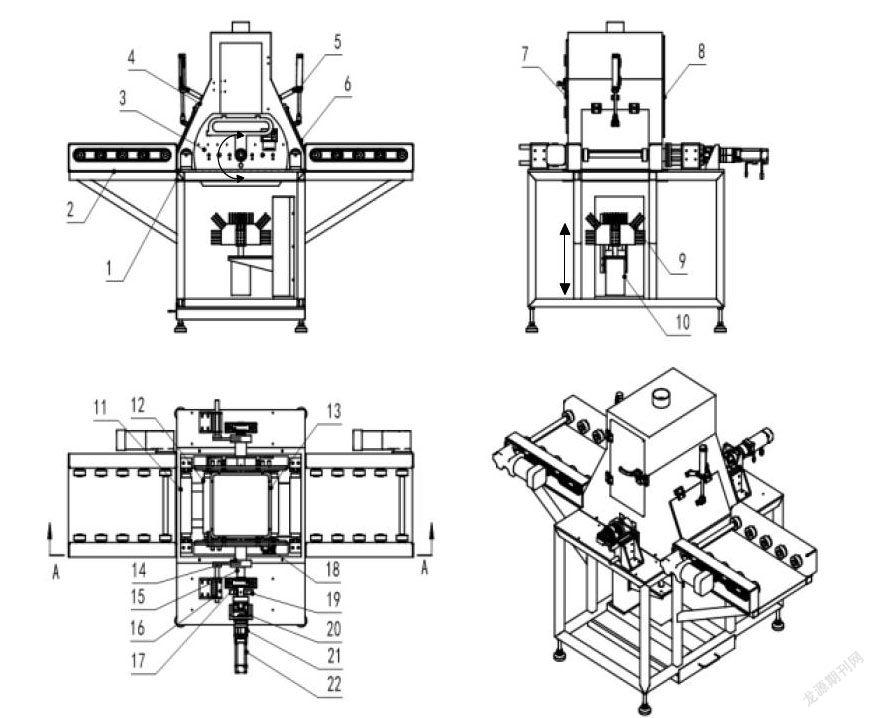
为了满足匣钵翻转清扫的工序要求,本设备采用串行式箱体结构,由翻转盘组件、电动滚筒、两侧阻挡夹持机构、前后自动门装置、密封腔体、清扫装置、接料盒等部件构成。具体结构如下图4所示。
3.1 翻转装置及传动结构
由于翻转仓内空间限制较大,特采用电动滚筒传动输送匣钵,以简化结构。通过翻转主轴、滚筒和两侧翻转盘等共同构成旋转体,由伺服驱动装置驱动,如下图4所示:
翻转盘最小尺寸对应匣钵体对角线长度及阻挡夹持机构安装尺寸,经设计确定其直径为D=500m,其间均布4组电动滚筒,间距120mm(不可大于140mm),避免匣钵经过两轴时因空挡过大在重力作用下发生倾斜,从而保证传输的平稳性。滚筒直径与主线体辊轮直径保持一致为Φ60mm,线速度5~10m/min配调速器可控。同时,在一侧翻转盘上安装卧式机械行程开关以检测匣钵到位。翻转组件整体结构紧凑,易于拆卸和维修。
此外,在翻转主轴一端上安装机械限位机构以确保翻转角度是在预设范围内,且在0°和180°两处极限位置分别安装接近开关,检测转盘的实际翻转角度,避免翻转盘出现误动作。
3.2 匣钵阻挡夹持机构
匣钵到位即处于翻转中心轴前后对称时需对其进行阻挡和夹持限位。特设计一种夹爪—空心轴套式的夹持阻挡结构,分别安装于两翻转盘外侧且套设在翻转主轴上,具体结构如下图5所示:
在此机构的阻挡和上限位处安装尼龙块、夹持处安装弹性橡胶垫,并分别穿过翻转盘上对应的槽口(见图4);空心轴套段内衬耐磨滑动膜,外装自调心滚动轴承,轴承外圈安装于推板的孔座上;由两侧导杆气缸分别通过推板带动阻挡夹持机构沿着翻转主轴滑动,在其可随翻转组件一起旋转的同时实现夹板的开合动作。采用这种将匣钵周边“框”住和侧面压紧的方式能够可靠限位匣钵避免在翻转过程中滑落以及清扫时发生窜动现象。而且由于执行气缸是安装在翻转仓外,可以规避在粉尘环境下容易卡顿故障的问题。
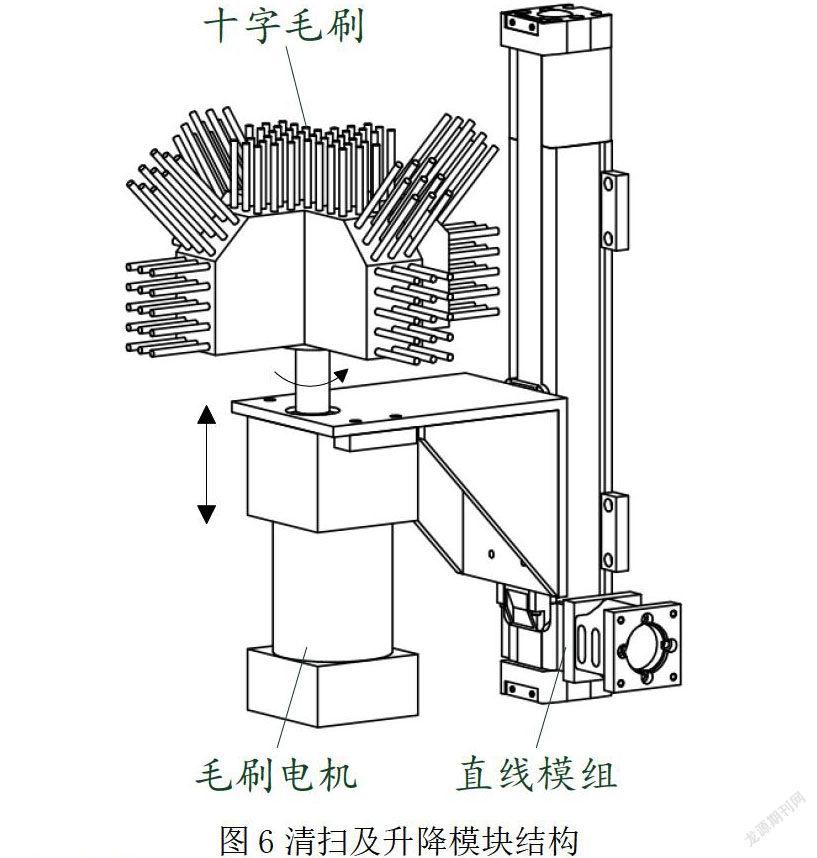
3.3 清扫组件及升降模组
匣钵在翻转过程中清扫组件须与之避让,翻转180°到位后匣钵倒扣,清扫组件升起清扫匣钵四壁及底部。计算得出升降行程S=200mm,鉴于底部高度空间十分有限且环境粉尘较大,普通气缸或者丝杠类升降结构无法适用。为此选用一种同步带-滑轨式直线模组,具备抗振动、耐冲击和高粉尘等特点,可满足于此此类苛刻工况的使用要求。此外,毛刷形式为十字型定制毛刷,设计保证其轮廓清扫时时与匣钵的贴合度最大化,以减小清扫死角。具体结构如下图6所示:
3.4 设备整体的密封和防尘
为防止清扫匣钵过程中产生扬尘外溢,在翻转仓上部采用整体式密封腔安装于框架平台上。腔体两端设计斜压式密封自动门装置;两侧开观察窗和维修窗,便于观察以及故障时取钵维修;顶部设计除尘接口与高压风机相连进行除尘,且保持仓内微负压,具体结构如下图7所示。框架下部四周封板密封,底部配抽屉式废料收集盒便于废料回收。主要电气元器件包括伺服装置、气缸、毛刷电机、直线模组等安装防尘罩。
4.设备其他相关问题分析
(1)将毛刷清扫工位和翻转倒残料工位集成到一个翻转清扫工位上,可以较大幅度降低设备成本,但也会导致处理节拍有所增加。可通过优化各执行器件的动作时间达到整线节拍要求,若无法满足则可考虑配置两组翻转清扫设备并行处理。
(2)由于匣钵为方形凹状结构,单自由度的毛刷旋转清扫方式必然会存在一定的清扫死角,只能通过优化毛刷结构以以降低废料残余率。当然理论上可采取多自由度行走清扫方式实现无死角清扫,相应的设备成本会提高,结构也会更复杂。
(3)取决于整线工作面高度要求,使得本设备采取的废料收集方式为抽屉式废料收集盒需人工定期收料。对于可满足设计所需高度或设备布局在抬升后的钢平台上的情况则可安装收料漏斗,底部收料接口接除尘风机实现自动收料。
5.总结
(1)根据锂电池正极材料的自动化生产工序要求、匹配整线配置,设计翻转清扫设备的主体结构形式并确定了设备的主要技术参数。
(2)翻转盘组件、阻挡夹持机构、清扫组件和升降模块是本设备的核心零部件,相应地在翻转或静止时,保持匣钵有效阻擋夹持定位且不影响其转动;在高粉尘环境下能够可靠地升降清扫;辅以整体密封和防尘措施,是本设备结构设计的关键。
(3)定性分析了本设备可结合实际情况做改进和完善的几个问题点。但总言之,通过研制一种翻转清扫一体化工位,可解决目前锂电池正极材料自动化生产中流动性不好的粉料难于清扫的技术难题,有效降低设备成本、减少人工干预、提高生产效率。
参考文献
[1]李恒,张丽鹏,于先进,etal.锂离子电池正极材料的研究进展[J].硅酸盐通报,2012,31(6):1486-1490.
[2]缪磊,郑万林,杨国榜,万鹏.一种锂电材料全自动生产方法及生产线[P].广东:CN102018000046488.X,2018-01-17
[3]吴尚宪.辊道式电阻炉自动上下料生产线系统[P].江苏:CN206019303U,2017-03-15.
[4]奚思,徐金龙,李争.一种带积放功能的自动输送线体的研制[J].重庆理工大学学报(自然科学),2015,29(9):75-79.
[5]蒋海波.锂电池正极材料作业场所粉尘扩散规律研究[D].
[6]金莹,鹿乐民.粉状材料烧结匣钵翻转机的设计[J].机床与液压,2017(9).
[7]朱雳,王达,王玲,etal.固定式翻转机中翻转机构的综合设计与制造[J].产业与科技论坛,2015(9):65-67.
[8]刘建平,沈文伟,王理,张晓飞.一种锂电池正极材料生产用清钵装置[P].江苏:CN205752374U,2016-11-30.
[9]杨灏泉,李文鹏,徐勤坤,李亚平.一种适用于箱体的无死角深度清扫装置[P].云南:CN109013599A,2018-12-18.
[10]霍李均,毛羲佳.一种行程可控的自动清洗机构[P].江苏:CN202017001922703,2017-12-29.
作者简介:宋超(1983.10-),男,河北唐山人,大学本科,毕业于南京理工大学,自动化专业,于2007年7月加入中国电子科技集团公司合肥恒力装备有限公司。
猜你喜欢
阅读(科学探秘)(2022年6期)2022-06-23
汽车实用技术(2020年15期)2020-10-20
意林(2020年10期)2020-06-01
动漫界·幼教365(大班)(2019年10期)2019-10-28
科技资讯(2019年4期)2019-05-14
汉语世界(The World of Chinese)(2019年2期)2019-04-19
科学与财富(2018年35期)2018-01-15
家教世界·创新阅读(2016年12期)2017-01-09
劳动保护(2016年9期)2016-11-12
企业导报(2015年6期)2015-04-27