基于多源数据融合的积放链电机状态检测方法
2019-09-10 07:22卢小江
汽车与驾驶维修(维修版) 2019年5期








摘要:为了对积放链输送汽车驾驶室时的驱动电机运行状态进行检测,分别检测积放链驱动电机的振动、温度和绕组的数据值,采用一种基于多源异类数据融合技术的方法。该方法先对同类数据进行融合计算,剔除高冲突和异常数据,再采用D-S证据融合规则,对积放链电机状态进行预测判断。通过实例验证与不同算法间对比分析,表明该方法融合结果置信度更高,能有效提高预测结果的可靠性和准确性。
关键词:多源数据融合;汽车驾驶室;电机状态;D-S证据
中图分类号:U471
文献标识码:A
1 同类数据融合算法分析
1.1 最优融合集的算法
由于积放链电机运行是一个多变量和多因素耦合的过程,积放链运行时,输送的汽车驾驶室数量、总质量和环境温度等的变化,都会造成积放链电机的振动、温度及绕组数据也随之变化。即使积放链电机运行状态正常的情况下,在不同日期时间检测出的数据值也会相差巨大,存在高冲突和异常数据,对技术人员的预测判断带来干扰。因此,根据检测仪器在不同时间與不同状态下的检测数据,采用最优融合集的同类数据融合算法[1],对积放链电机运行状态变化预测判断。最优融合集算法把某个检测仪器在不同时间测得的积放链电机状态数据进行局部处理,通过定义最优融合集来获取不同时间和不同状态下的积放链电机的振动、温度及绕组数据值。在融合过程中进行数据对比,将强冲突和异常数据值进行剔除,得到t时段内数据值的最优融合集为Φ。融合估计表达如公式(1)所示。
式中:xi(t)表示融合后的数据值;ωi(t)表示Δti时刻的权重系数;Si(t)表示Δti时刻的检测数据值。若检测数据Si(t),Sj(t)的绝对距离越小,则说明数据融合度越高,两检测数据一致性就越高。反之,则称该时段的检测数据相互偏离,其数据一致性就越低。
1.2 仿真分析
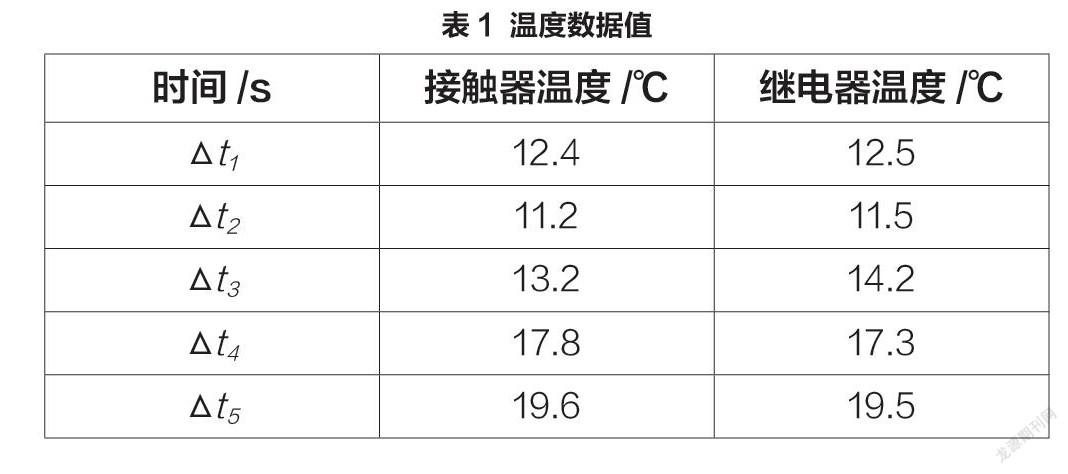
选用技术人员实际检测记录的积放链电机温度数据库,与其他常用同类数据融合算法进行对比分析,实例验证最优融合集算法的有效性和可靠性(表1)。
表1中,前3个都是某时段下,积放链电机运行过程中,检测电机接触器和继电器温度的正常值,而Δt4和Δt5是随机出现的误差值,即高冲突和异常数据。再分别应用最优融合算法、平均值算法以及可靠性算法[2]对检测数据进行融合,得到的融合结果如表2所示。
表2中,相对误差是指融合结果与Δt1时刻的实测值进行对比。从表2融合结果值可看出,平均值算法的相对误差是18.7%~20.0%,可靠性算法的相对误差是16.9%~17.6%,而最优融合算法的相对误差小于4.8%,说明最优融合算法的结果更逼近实测值,反映出此算法的可靠性。
为了对比各算法的稳定性,再利用matlab软件进行仿真实验。根据设备管理系统里记录的2015—2018年间的积放链电机检测数据值,分别运用上述3种算法进行数据融合,得到各融合算法的相对误差分布趋势如图1所示。在数据库中,实际检测记录的数据肯定有很多异常和误差数据。根据图1融合结果可知,最优融合集算法的相对误差最小,且波动幅度较小,说明此算法的融合精度及稳定性更强。而可靠性算法和平均值算法,没有将强冲突信息数据预先剔除,导致融合结果波动大,会给技术人员的预测判断造成困难。因此采用最优融合集算法对同类数据融合更具优越性。
2 异类数据融合算法分析
所谓异类数据,是指具有不同物理属性和不同测量范围的检测仪器数据[3]。积放链电机的振动、温度及绕组就属于异类数据。现行人工判断方法没有结合积放链电机多源异类数据值的变化特点,存在判断准确率低的缺点。因为多源异类信息融合的特殊性,本文采用D-S证据理论对积放链电机的异类数据进行融合,根据融合结果对积放链电机状态进行预测判断,并通过实例验证方法的准确性。
基于D-S证据理论的算法。积放链电机状态差、良、优的分类就是命题。而振动、温度及绕组检测仪器分别检测的数据,是对积放链电机运行状态识别的证据。利用这些证据构造相应的概率分配函数,对积放链电机状态赋予一个可信度,概率分配函数以及相应的鉴别框架合称为一个证据体[4]。
设有2个证据e1和e2,它们之间相互独立,设e1和e2的基本可信度分配函数分别为m1和m2,对于e1和e2合成的命题X,e1和e2的基本可信度的D-S合成规则如公式(2)所示。
式中:k∈[0,1],k为证据e1和e2的全局冲突信度,D-S证据融合方法充分挖掘检测数据值的一致性和冲突性,在证据权重分配时,冲突性数据会被最大限度的降低其权重系数,同时,提高一致性数据的权重系数。
3 实例验证与结果分析
3.1 积放链电机状态检测
目前,总装厂的技术人员使用不同仪器分别检测积放链电机的振动、温度及绕组等数据,检测频次是1次/月,把数据输入设备管理系统,依靠人工经验判断积放链电机的运行状态(差、良、优)(图2)。检测数据相互独立,系统无法识别振动、温度及绕组数据间的关联性,因此,人工经验判断方法的准确率不高,可信度低,易出现误判。
为了提高对积放链电机状态判断的准确性和可靠性,可采集积放链电机振动、温度及绕组数据,作为检测积放链电机状态的外部响应变量。根据上述最优融合集算法,分别对振动、温度及绕组数据进行局部融合,目的是对检测数据的异常及虚假数据进行剔除。剩余的有效性数据用于后续多源异类数据的融合度计算和权重系数分配,建立积放链电机振动、温度及绕组数据间的关联性,对局部融合后的多源异类数据进行基本概率分配,形成初始证据源,再应用D-S证据合成规则,得到积放链电机运行状态预测结果。
3.2 融合算法的对比分析
应用积放链电机的实际检测数据进行实例验算,对比分析D-S证据合成规则的准确性和可靠性。设定积放链电机状态的辨识框架为Θ={a,b,c}={差,良,优},选取设备管理系统里5个不同日期的检测数据值作为证据,如表3所示。
在表3中,T2时刻检测的数据明显与其他时刻數据相差较大,是高冲突证据。根据网格搜索与交叉验证的支持向量机(SVM)算法[4],结合相应知识,得到上述5条证据的基本概率分配函数赋值,如表4所示。
在表4中数据可知,证据e2显示积放链电机运行状态差,而其余4条证据均显示电机状态良,e2属于高冲突证据。如果总装技术员根据此时刻的检测数据做判断,则容易出现误判。根据融合算法及D-S证据融合方法[5-6],分别对5条证据进行逐次合成,得到的融合结果如表5所示。
表5中,Θ是指全集;m(Θ)表示不确定的概率。由融合结果可知,随着证据数量增加,孙全方法融合结果由m(b)=0.234增加到m(b)=0.378,邓勇方法融合结果由m(b)=0.165增加到m(b)=0.403,说明在有冲突和随机误差证据时,上述2种方法不利于根据融合结果做出准确决策。而在设备管理系统检测数据库里,不可避免的存在误差和异常数据,孙全方法对冲突性证据引入了证据可信度,按照加权和平均的形式进行权重系数分配,主观性比较强,导致最终融合结果的差异会比较明显;邓勇方法是对单个证据先进行了多次合成,再应用组合后得到的平均数据进行证据融合,此过程会导致一些有利证据数据丢失。
与上述方法相比,D-S证据合成方法对电机状态良的预测结果由m(b)=0.405增加到m(b)=0.816,说明随着证据量的增加,预测结果可靠性和准确性越来越高。此算法优点是综合考虑了证据间的一致性信息和冲突信息,对每条证据的mass函数进行权重系数分配,充分考虑积放链电机振动、温度及绕组等检测值之间的关联性,最大限度的提高一致性证据的权重系数,有利于提高预测结果的可靠性和准确性。
4 结束语
根据积放链电机同类仪器检测值存在样本数据多和随机误差的特点,提出了一种最优融合集的同类数据融合算法。该算法能有效剔除强冲突信息,具有更优的融合精度和稳定性,目前的方法没有充分考虑积放链电机振动、温度及绕组等检测值之间的关联性。因此,采用D-S证据融合规则对积放链电机数据进行融合,并通过实例验证和对比分析,表明该方法能预先剔除高冲突和随机误差的检测数据,融合效率更高,收敛速度更快,有利于提高预测结果的可靠性和准确性。
【参考文献】
[1]杜许龙.基于信息融合方法的卫星部件可靠性预测[D].西安理工大学,2018.
[2]杲玄玄.基于多传感器信息融合的工业装备故障预测方法研究[D].湖南工业大学,2018.
[3]鹿高娜.基于D-S证据理论的融合事件检测算法研究[D].北京:北京交通大学,2016.
[4]罗小燕,陈慧明,卢小江,等.基于网格搜索与交叉验证的SVM磨机负荷预测[J].中国测试,2017,01:132-135.
[5]孙全,叶秀清,顾伟康.一种新的基于证据理论的合成公式[J].电子学报,2000,04:178-181.
[6]邓勇,施文康.一种改进的证据推理组合规则[J].上海交通大学学报,2003,08:534-536.