某车型全景影像系统显示不佳问题研究
2019-09-10 07:22张金叶刘军利
汽车与驾驶维修(维修版) 2019年5期
张金叶 刘军利





摘要:汽车全景影像系统出现显示不佳现象,影响客户使用体验。本文对汽车全景影像系统在不同环境条件下的显示不佳原因进行分析,提出解决措施,改善使用体验,并为以后汽车全景影像设计提供参考。
关键词:全景影像;摄像头;显示不佳;噪点
中图分类号:U472
文献标识码:A
0 引言
随着国内汽车保有量增多,拥挤的城市让泊车变得愈加困难,因泊车及起步操作引发的纠纷事故呈逐年上升趋势。同时,汽车技术迭代更新,高级驾驶员辅助系统(ADAS)迅速发展,并逐步从高端车型下探至中低端车型中。
摄像头和雷达作为ADAS的核心基础技术,近年来在汽车上的应用日益增多。全景影像系统可为驾驶员提供车辆周围360°的全景鸟瞰图,帮助驾驶员克服行车盲区的困扰[1]。该系统极大拓展了驾驶员对车辆周围环境的感知能力,使其在车辆起步、泊车入位、窄道会车、规避障碍等操作时轻松自如,有效减少刮蹭、碰撞、碾压等事故的发生[2],其已成为高级驾驶辅助系统中的关键技术[3]。
1 系统构成
全景影像系统由1个控制器和4个广角摄像头构成,摄像头分别布置于进气格栅、行李舱门扣手和左右外后视镜处,均为视角大于180°的广角摄像头,其所采集的图像为鱼眼图像[4]。控制器对鱼眼图像进行矫正,得到正常视角的图像,并将图像拼接实现车辆周围360°无死角的观测视野,如图1所示。
全景影像系统方案主要为以下2种。
(1)采用30万像素标清摄像头,控制器传输CVBS(Composite Video Broadcast Signal)模拟视频信号至显示屏。其特点是图像清晰度低,色彩质量较低,信号抗干扰能力弱,成本低。
(2)采用100万像素高清摄像头,控制器传输LVDS(Low Voltage Differential Signaling)数字视频信号至显示屏。其特点是图像清晰,色彩质量高,信号抗干扰能力强,成本高。因采用低电压差分信号(LVDS)接口,具有较低的信号幅度(0.35V)和差分架构,可大大降低电磁辐射。
某车型全景影像系统采用30万像素CMOS图像传感器芯片,通过同轴电缆将CVBS模拟信号传输至中控显示屏,并通过触摸屏操控切换全景影像显示视角。如表1所示,车辆起动后,全景影像系统自动进入待机模式,根据车辆CAN信号或驾驶员按键操作完成系统开启、关闭及图像视角切换等动作。系统工作状态下,当驾驶员操控左/右转向时[5],会触发BCM发送左右转向信号到控制器,系统自动切换至左/右摄像头画面显示。驾驶员亦可通过显示屏操控进入左视、右视和拐角界面。
全景影像系统在不同外界环境条件下,会出现显示不佳的现象。
2 故障现象
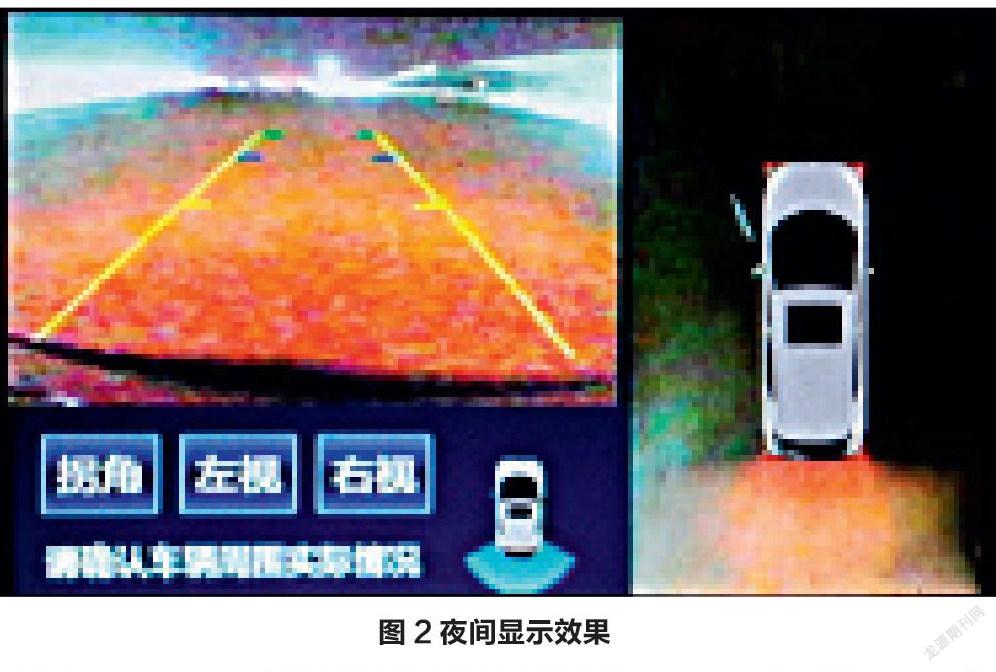
(1)在夜间,周围环境光线较弱时,全景影像显示画面噪点多、清晰度低。倒车时显示进入后视界面,制动时制动灯点亮,后视影像会出现成片红色,影响驾驶员对障碍物的判断(图2)。
(2)在日间环境光线明暗差异大时,全景后视摄像头输出影像闪烁(图3)。
图2夜间显示效果
图3图像闪烁显示效果
3 原因分析
3.1 夜间显示效果不佳
(1)夜间噪点较多:全景影像系统接到BCM发出的小灯信号后,自动切换为夜间显示模式。为了保证图像亮度,摄像头自动放大亮度增益,而周围环境干扰信号也被同时放大。环境亮度越暗,亮度增益越高,则表现为噪点越多、越明显。
(2)清晰度较低:因系统核心元件图像传感器及镜头成像质量有限,夜间噪点增加的同时,清晰度亦受到影响。弱化噪点,可有效改善此问题。
(3)制动时后方影像出现成片红色:为保证白天工况下图像色彩丰满,设定系统影像饱和度值较高。在夜间低照度环境下,制动灯成为单一光源时,红色成为主色调被过分放大,導致影像出现成片红色。全景影像系统显示效果的调试,需要将显示参数调节至白天工况及夜间工况的平衡点。目前的平衡点侧重白天工况,而夜晚工况出现了显示效果不佳的现象。
3.2 日间环境光线明暗差异大时影像闪烁
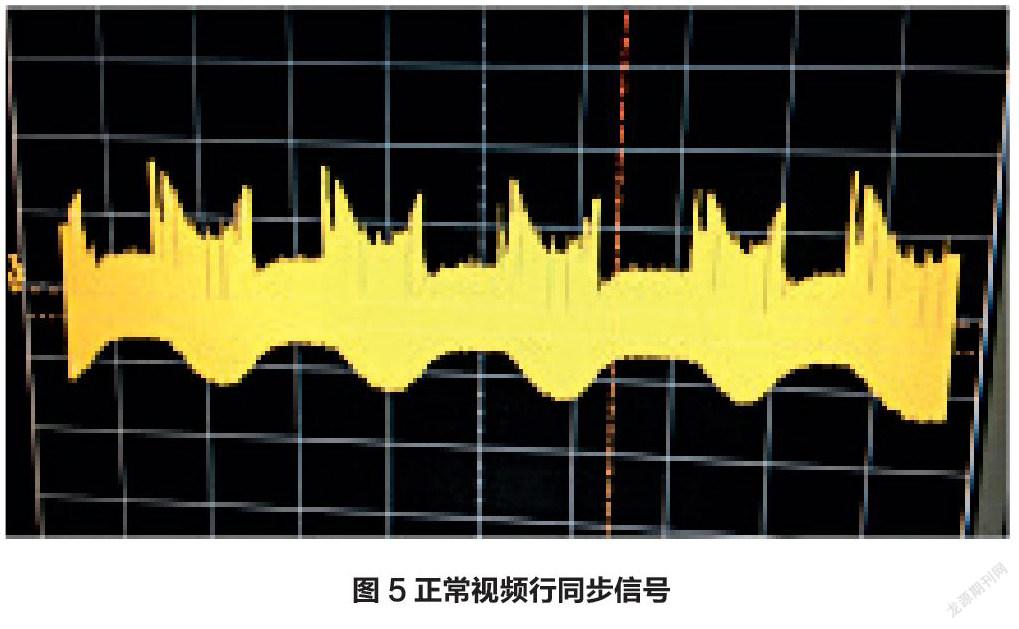
在强烈明暗对比特定环境下,即高亮部分超过90IRE,低亮部分小于10IRE(IRE为视频测量中的单位,是将视频信号的有效部分的视频安全黑色到视屏安全白色之间均分为100份,即黑电平与白电平均分100份,每份为1IRE),摄像头所采集影像出现强烈的明暗对比,视频行同步信号中出现高、低电平强烈变化。如图4、图5所示,信号在通过交流耦合电路进行负反馈修正时,修正后视频行同步电平被部分过滤,从而出现视频行同步信号衰减,因视频信号的部分丢失造成显示影像闪烁问题。
4 解决措施
4.1 解决夜间显示效果
为提升夜间显示效果,需要从策略上将白天、夜间显示参数分开调试并存储。
(1)亮度参数调整:将白天/夜间模式亮度值使用2个寄存器分别存储,并单独调整夜间工况亮度值,以弱化噪点。
(2)噪点参数调整:将噪点参数由原先较柔和的“絮状”噪点改为较细密的“点状”噪点,以有效提升图像中障碍物边界,变相提升显示清晰度。
(3)夜间工况显示策略调整:在环境光照度低于15Lux时,设定摄像头进入黑白显示模式,以有效提高显示影像对比度,消除刹车灯点亮时影像成片红色的问题。
4.2 解决日间显示效果
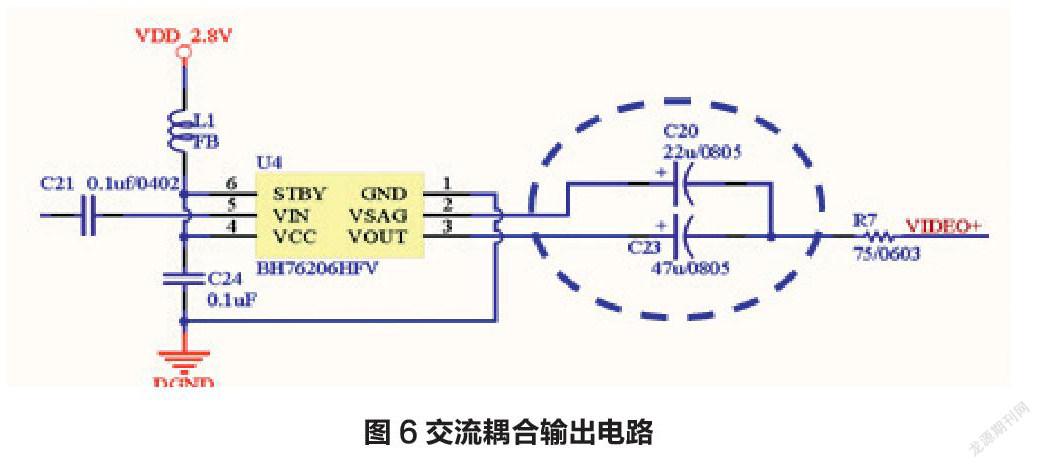
为解决日间环境光线明暗差异大时影像闪烁,将交流耦合输出电路改为直流耦合输出电路,以避免视频行同步信号衰减,如图6、图7所示。将原C2022uF、C2347uF两个电容使用0Ω电阻短接,成为直流耦合电路,以避免PCB板更改。
5 结束语
全景影像系统显示调试,需根据不同环境特点综合考虑,并对各类极限工况进行测试,以满足能够满足未来车载全景辅助泊车系统清晰、稳定的视频图像需求。
【参考文献】
[1]陈红兵,刘怡俊,李超.多视角智能可视倒车辅助系统的研究和设计[J].现代计算机(专业版),2014(15):51-57.
[2]李玉玉.360°全景技术让行车更安全[J].中小企业管理与科技(下旬刊),2018(6):187-188.
[3]江龙.360°泊车辅助系统全景成像的研究[D].哈尔滨工业大学,2017.
[4]王大兴.车载全景系统的设计原理以及应用[A].中国汽车工程学会(Society of Automotive Engineers of China).2014中国汽车工程学会年会论文集[C].中国汽车工程学会(Society of Automotive Engineers of China):中国汽车工程学会,2014(5).
[5]鞠剑平,吴思华,吕毅等.无盲区车载全景影像倒车系统的设计[A].湖北省机械工程学会机械设计与传动专业委员会暨武汉机械设计与传动学会2015年第23届学术年会论文集[C].2015.
猜你喜欢
航海(2020年5期)2020-11-02
影像视觉(2020年4期)2020-05-09
影像视觉(2019年3期)2019-04-20
航空模型(2016年11期)2017-05-08
科技资讯(2016年9期)2016-05-14
数码摄影(2016年1期)2016-02-27
计算机光盘软件与应用(2014年24期)2014-10-21
数码摄影(2009年7期)2009-09-28
网络与信息(2009年6期)2009-07-31
网络与信息(2009年5期)2009-05-29