汽车电子架构设计的研究与分析
2019-09-10 07:22翟皓蓉
汽车与驾驶维修(维修版) 2019年5期
翟皓蓉
摘要:本文阐述中国汽车电子架构设计从无到有的变革,研究分析目前电子架构设计的发展及变化趋势,并对未来汽车电子架构发展方向提出建议和看法。关键词:汽车;电子架构
中图分类号:U468
文献标识码:A
1 汽车电子架构
随着时代的进步,人们对汽车电子功能的需求越来越多。这些需求涵盖了安全性、娱乐性、舒适性和智能等各方面。汽车电子部件的堆砌带来汽车质量变重、成本增加,能耗也在增加。大概在2008年初,国内车企首次接触到电子架构设计的概念。这项概念从客户需求出发,以需求为导向,以功能实现方式为主导,对功能逻辑、信号交互、功能分配、网络架构进行定义设计,故而称之为电子架构设计。
2 电子架构平台设计带来的变化
2.1 从广义方面来看
2.1.1 推动正向设计思路的落地
V型正向开发设计的思路一直在提,但由于受到的制约因素较多(包括零部件沿用、成本制约等),一直都未真正的实施。通常的做法就是打补丁,在现有框架的基础上更改优化。这样不仅会带来一些重复开发的工作,造成管理成本增加,且由于零部件工程师无法完整评估需要更改哪些关联部件,以及是否会产生影响,因而存在风。全新平台的架构设计则更利于实施正向开发思路。
2.1.2 平台化设计提高零部件的通用性,降低成本
平台化的开发支持零部件的通用性,同平台各车型产量的叠加,直接促使零部件成本的下降,产品质量也更加稳定。大众集团在这方面尤为明显,不仅仅是外观上的套娃,其内在的电子架构也是平台化的产物。大众这一开发理念引领了行业风潮,相比之前的单打独斗,实现平台化在管理检测和成本控制上的优势非常明显。
2.1.3 产品迭代快,提升竞争力
相同平台的车型,由于开发是同时启动的,且零部件的通用化程度很高,因而当首款车型上市后,后续车型的迭代会非常快,通常只需要5~8个月的时间。以吉利的领克品牌举例,领克01上市时间为2017年11月28日,领克02上市时间为2018年6月29日,领克03上市时间为2018年10月19日。领克系列能够迅速上市并占领市场,就是得益于其CMA架构平台的开发。
2.2 从狭义方面来看
2.2.1 推动网络架构的升级
网络架构的搭建是电子架构设计的核心部分,电子功能增多,信号交互增多,功能响应速度快,如果还基于早期的硬线连接通信方式,远远满足不了功能需求的变化,同时还会带来整车重量的增加。因此,有了总线通信的需求,目前较�遍的是CAN通信,后期随着智能化的需求,CANFD\ETHERNET都是未来主流的通信方式,更多是几种通信方式集成的情况,随着成本的降低和技术的提升,不排除全车使用局域网的可能性。
网段的划分也基于功能实现方案,通常我们会把信号交互多的几个控制器放在同一网段,这样可以减少信号路由(通过网关转发),实时性好,出现故障的几率低。评判网络架构的标准除了信号路由的数量以外,还有可扩展性的要求,一个好的网络架构可以支撑电子架构平台未来5~7年的功能需求[1]。
2.2.2 功能分配
前期的逻辑定义、信号交互都还停留在设计概念阶段,到功能分配时涉及到落地的可行性,需要和供应商共同讨论。这个阶段也会受到很多外在条件的制约,零部件厂商的能力,主机厂的能力在这个阶段会被彻底的挑战。但不论博弈的过程如何,笔者认为高集成度控制器的前�都不会改变。高集成度控制器带来的信号交互的减少、成本的降低是显而易见的。也只有这样才符合电子架构发展的目标:以平台车型的需求为基础,兼顾成本,质量、性能等因素,综合平衡、优化的结果。
3 汽车电子架构的演变
上文已经提及网络架构在电子架構设计中的核心地位,电子架构的演变之一就是网络架构的演变。最早的电子架构就是硬线连接的线束原理图,传感器、控制器、执行器之间的信号交互、电源、驱动全部硬线实现。功能多导致线束多,增重、装配困难等问题接踵而至。
到第2代的电子架构采用总线通信时,这种状况才得以缓解,大部分的信号可以通过CAN/LIN总线传递,大大减少了线束的数量。但由于网络负载率的限制,也导致这种单网段的通信无法扩展更多的功能,于是有了第3代电子架构的产生,多网段CAN总线通信网络架构,这一代架构基本可覆盖之前10年里所有功能的通信需求。
早在2000年初,笔者刚刚接触到CAN总线通信时,大众、奥迪等外资企业就已经在使用多网段总线架构,那时候国内还没有电子架构设计的概念。未来,随着对自动驾驶,数字化驾驶舱、V2X等概念的提出,现在的第三代电子架构平台已无法满足传递数据量及传递速率的要求,早先提出的MOST/FLEXRAY总线技术也被以太网所取代,CAN的升级版CANFD也处于试用期,究竟能否替代CAN,还需要时间的检验。
目前,比较主流的做法是在对通信速率及带宽要求较高的Infortainment功能域以及ADAS功能域采用以太网通信,其他网段仍然采用CAN总线通信。比如大众最新的MEB平台就采用了类似这种方案,可称之为第3.5代电子架构。
4 汽车电子架构的发展趋势
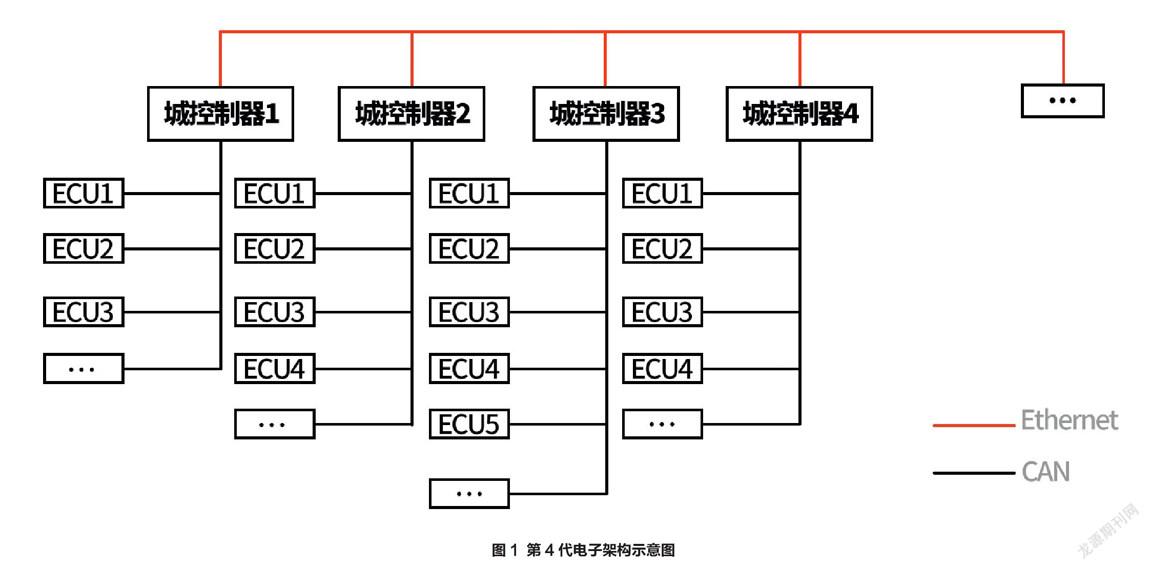
未来的第4代电子架构涉及到了域控制器的概念,也就是上文提及的高集成度控制器的一种发展趋势(图1)。在域控制器的加持下采用以太网为主干网,域控制器下属的子网段则采用CAN通信,主要的控制策略和算法均在域控制器里,下属的子网段里控制器则更多的承担了信号的采集、简单处理以及执行驱动的功能,这样的控制器多放置于离传感器或执行器很近的地方,或者直接和传感器、执行器集成,最大程度减少线束的长度[2]。由于架构方案涉及到所有的电子部件,所以其发展方向也影响到零部件产品的发展方向。这是相辅相成的关系,零部件厂商的平台规划同时也影响到整车电子架构的发展趋势。没有好坏之分,架构设计需要平衡。
5 结束语
汽车电子架构的设计就好像房地产开发商盖房子,房子盖多大,地基打多深,总共盖几层,每户有几个房间,每个房间的功能是什么,每个房间有几个插座,几个开关,下水在哪里等等。在这个框架下,业主拿到房子后才能各显神通进行风格各异的装修。汽车电子架构设计也是如此,在约束各系统零部件开发的同时也要给予极大的自由度,这样才能适应平台下各车型的需求。
【参考文献】
[1]罗红梅,周逸凡.智能汽车产业的发展情况[J].摩托车技术,2019(03).
[2]孙娜.智能汽车未来的发展趋势分析[J].中外企业家,2018(25).
猜你喜欢
中国自行车(2022年3期)2022-06-30
电脑知识与技术(2022年12期)2022-05-29
科学家(2021年24期)2021-04-25
当代化工(2020年4期)2020-08-24
网络空间安全(2019年8期)2019-03-18
电脑知识与技术(2016年18期)2016-11-02
医学信息(2015年7期)2015-03-20
科技传播(2012年10期)2012-06-06
微型计算机(2009年12期)2009-12-21
现代电子技术(2009年14期)2009-09-05