基于位置检测的桥式起重机模糊滑模纠偏控制
2019-09-10 07:22毛景魁倪艳荣陈智娟
河南科技 2019年34期
关键词:桥式起重机
毛景魁 倪艳荣 陈智娟





摘 要:起重机在实际运行过程中会出现跑偏和“啃轨”的现象,从而影响起重机的使用和寿命。针对此现象,采用传感器检测车轮的位置信息,使用模糊控制和滑模控制相结合的控制策略,有效提升起重机的性能,提高实际生产效率,延长起重机寿命。
关键词:桥式起重机;位置检测;模糊滑模控制
中图分类号:TH215;TP273 文献标识码:A 文章编号:1003-5168(2019)34-0063-03
Deviation Correction of Bridge Crane Based on Position
Detection with Fuzzy Sliding Mode Control
MAO Jingkui NI Yanrong CHEN Zhijuan
(Henan Institute of Technology,Xinxiang Henan 453003)
Abstract: In the actual operation of the crane, there will be deviation and "rail gnawing", which will affect the service life of the crane. In view of this phenomenon, the sensor was used to detect the wheel position information, and the control strategy of fuzzy and sliding mode control was used to effectively improve the performance of the crane, improve the actual production efficiency, and extend the life of the crane.
Keywords: bridge crane;position detection;fuzzy sliding mode control
1 研究背景
在工業生产现场,桥式起重机的运行环境较恶劣,工作任务较繁重,而各结构件的稳定性和可靠性较差[1]。同时,桥式起重机具有跨度大、水平刚度低、零件多、安装过程复杂的特点,而且传动机构的安装精度难以得到有效保证,特别是在使用过程中运行频繁的起重机,其传动机构的积累误差更大,再加上实际工作时会遇到各种复杂情况,桥式起重机在运行时难免会有不同程度的跑偏或“啃轨”现象,桥式起重机的车轮轮缘和轨道会产生接触,相互挤压摩擦,从而降低实际的作业效率,甚至发生安全事故[2-4]。在桥式起重机运行过程中,实施实时纠偏控制,可提高系统稳定性,保障人员和设备安全,降低维修费用,提高实际生产效率[5]。
近年来,起重机运行过程中的“啃轨”问题引起了相关领域的高度重视,由此,出现了大量研究成果。传统的纠偏控制方法主要为提高钢架强度,提高安装精度,如加装水平轮,轮缘与轨道之间的滑动摩擦被水平轮的滚动摩擦取代,在相同侧向力的情况下,运行机构的摩擦阻力大大降低。
采用机械的方法对起重机进行纠偏处理,虽然能减小运行中的摩擦力,提高起重机的运行效果,但并不能避免起重机行走时出现偏差。
在起重机运行过程中,实时检测起重机的偏移状态,并实施纠偏控制[6],可以防止起重机运行中发生偏移,提高起重机运行的安全性。
2 运行“啃轨”及偏移检测
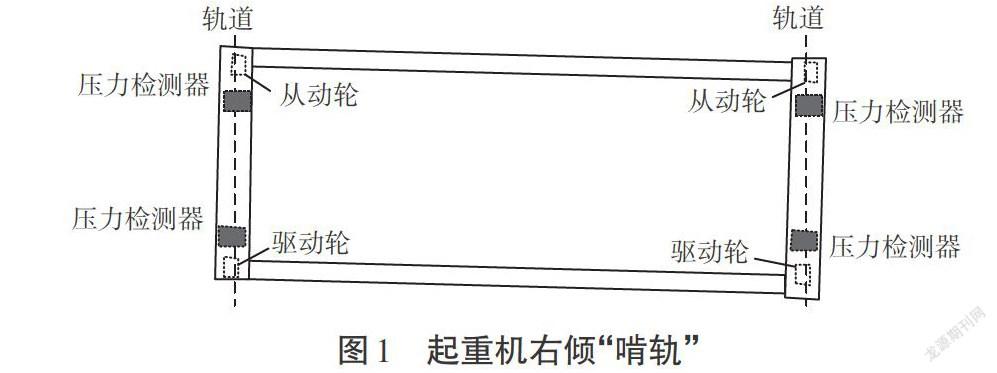
起重机驱动轮的动力不一致,使起重机的驱动轮和从动轮发生右倾斜,与轨道的摩擦力增加,从而发生“啃轨”现象,如图1所示。同理,向左倾斜时也会发生左倾“啃轨”现象。
倾斜的角度越大,驱动轮或从动轮与轨道的压力就越大,造成接触处的摩擦力增加,引起接触面发热、磨损,甚至无法正常工作。
通过上述分析可知,起重机产生偏移是发生“啃轨”的前兆。为此,将传感器检测到的结果送给控制器,根据不同的原因,使用模糊滑模控制算法,实施纠偏控制。
3 基于模糊滑模控制的控制量生成
对于因驱动不一致而发生起重机偏移造成的起重机工作不正常或无法工作的情形,通过调节相应驱动轮的驱动力,即驱动电机的速度,纠正起重机的偏移,使起重机始终与轨道“对正”,保证起重机沿轨道顺畅运行。
令检测矩阵[H]为起重机上传感器的输出,则[H]为:
[H=H1H2H3H4] (1)
式中,[H1]、[H2]为左侧微偏移传感器输出;[H3]、[H4]为右侧微偏移传感器输出。起重机运行时,偏移传感器的输出为[Ht],[H0]为正常状态的输出,则定义偏差:
[S=e(t)=H(t)-H(0)] (2)
对偏差求取微分后,可写为:
[e(t)=S·=ΔSΔt=H(t)-H(t-Δt)ΔtΔt→Ts] (3)
对于起重机的偏移,采用的方法是同侧调整;偏移为零时为正常工作状态。把正常状态看作调节量为0的滑模面,按照加权计算后获取输入控制量,计算公式如式(4)所示。
[u(t)=αS·+βS+C] (4)
式中,[α]为偏移微分后的系数;[β]为偏移的比例系数;[C]为常数;[S]为滑模面。
设起重机右侧速度与左侧速度的偏差为正,则在实际运行中,[C]的符号与[S]的符号一致。滑模变结构的纠偏控制过程如图2所示。从图2可以看出,纠偏过程是一个多次震荡、逐步收敛的过程。
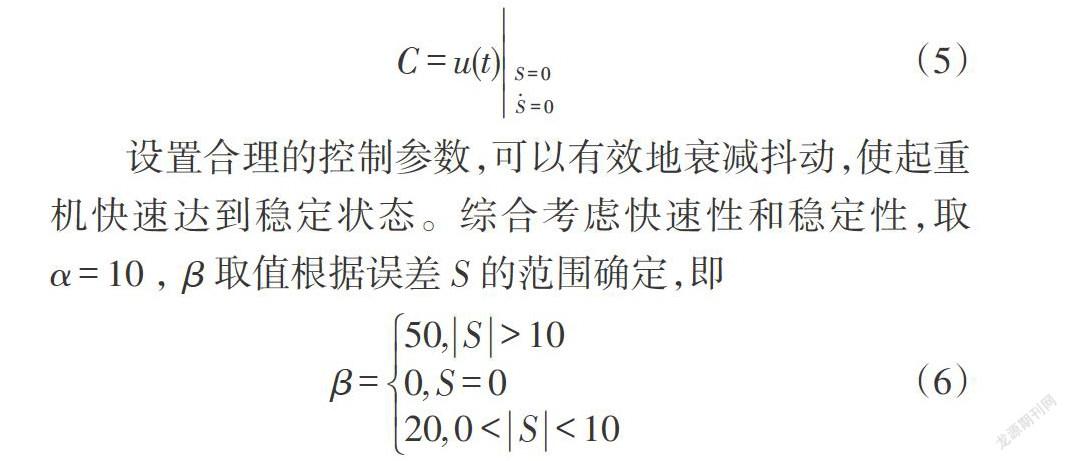
在实际控制时,由于静摩擦力的存在而导致系统出现控制死区。常数[C]是为了消除控制死区而设置的,其大小静止状态时,可逐渐施加控制,直至起重机开始运动,此时的控制量即为常数[C],可表示为:
[C=u(t)S=0S·=0] (5)
設置合理的控制参数,可以有效地衰减抖动,使起重机快速达到稳定状态。综合考虑快速性和稳定性,取[α=10],[β]取值根据误差[S]的范围确定,即
[β=50,S>100,S=020,0<S<10] (6)
4 基于模糊滑模控制的控制量输出
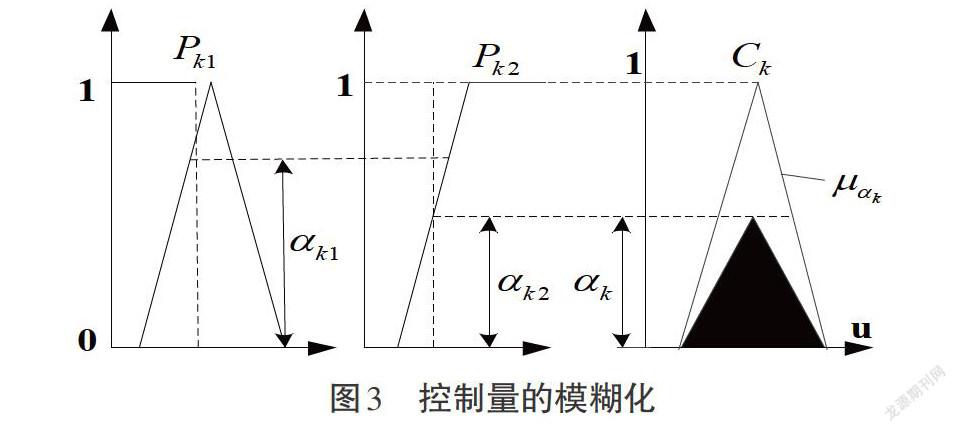
滑模算法本身存在“抖振”的缺点,表现在纠偏控制上为偏移量在平衡点附近的多次振荡。
为减小系统的调节时间,对计算出的控制量进行模糊化,使用预定义的控制规则得到模糊化的控制量,再使用面积重心法去模糊化后,得到实际控制量,其过程如图3和图4所示。
由于起重机一般采用2个驱动轮,需要对实际控制量经过变换矩阵[B],得到施加到驱动电机上的控制量[M],即
[M=M1M2=FB=F1F2F3F411] (7)
式中,[M1]为左侧电机控制量;[M2]为右侧电机控制量。[M]>0为正转,[M]<0为反转。
位移产生差别后,控制器对起重机的驱动轮进行控制,保证起重机始终对正轨道,避免出现较大偏差,保证起重机稳定、安全运行。
5 控制效果
采用模糊滑模控制后的起重机偏差控制效果如图5所示。
从图5可以看出,位移产生差别后,控制器对起重机的驱动轮都进行了控制,保证起重机始终对正轨道,避免出现较大偏差,保证起重机稳定、安全运行。
6 结论
采用模糊滑模控制对起重机运行过程进行纠偏,可对偏移进行快速处理。结合模糊控制,有效消除滑模控制的振荡,使系统控制更加平滑,兼顾了纠偏控制的快速和平稳性能。
参考文献:
[1]李勇刚,刘思宇,朱红求,等.桥式起重机大车自适应同步协调纠偏控制[J].中南大学学报(自然科学版),2018(8):1971-1978.
[2]徐伟锋,宋兴海.纠偏控制技术在桥、门式起重机中的应用[J].起重运输机械,2014(1):73−74.
[3]景超,霍丽娜,李晓明.大跨度门式起重机的电气自动纠偏系统[J].重工与起重技术,2016(2):23−24.
[4]徐耀良,赵万剑,王博,等.自适应模糊控制在纠偏控制器中的应用[J].控制工程,2013(2):313−316,323.
[5]刘瑾,李兴根.桥式起重机纠偏控制策略的研究[J].新技术新工艺,2010(10):27-29.
[6]王进峰.起重机行走自动纠偏系统的研究[J].电气技术,2013(8):37-39.
猜你喜欢
科学与财富(2017年8期)2017-04-11
科学与财富(2017年6期)2017-03-19
电子技术与软件工程(2016年24期)2017-02-23
科技与创新(2016年15期)2016-09-23
科技视界(2016年1期)2016-03-30