
基于Arduino的迷你巡线机器人Qbot
2019-09-10 07:22
电脑报 2019年24期




Qbot是之前朋友一起构思的一个项目,主要起因是看到这个会解迷宫的巡线小机器人(图1)。觉得很搞笑,想弄一个耍耍,但是这玩意儿国内并不好买,这个小车在我看来还是有很大的改进空间的(而且不是基于Arduino的而是原生AVR),于是打算自己动手重新造轮子。
仔细想想这东西的可DIY性还是挺高的,除了巡线外,解迷宫、遥控、对战等玩法还有很多,要是基于Arduino开源当然就更合适啦。最后选定的主控芯片方案是Mega32U4,主要是因为自带串口BootLoader,可以直接通过USB下载程序。对比于3pi增加了:128×64分辨率的OLED显示屏、两个可编程配置的炫彩RGB尾灯、可以直接USB充电的锂电池管理电路、陀螺仪模块用来识别一些手势以及当然更小巧的机身。
硬件篇
巡线传感器使用的是贴片的对射式光电开关,其实就是跟普通的巡线模块一样的传感器只不过体积会小巧很多。一共使用了5个红外管,实践测试巡线效果非常好。
充电管理IC使用的是TP5400,选它的一个重要原因是,这颗IC不仅能够管理锂电池的充电,还带升压功能,因为锂电池的电压是3.7V,而Arduino需要工作在5V上,所以就免去了电源升压电路的设计,进一步缩小了体积。也加入了蓝牙模块(图2),可以使用手机连接进行一些调试和遥控。
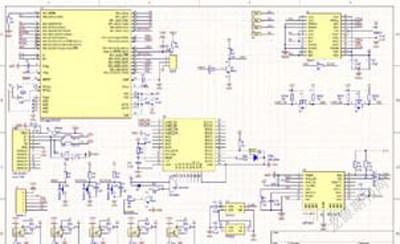
电机采用的是N20减速电机,非常常用的型号,不需要编码器,电机驱动使用TB6612两路直流电机驱动(图3)。轮子两边的主动轮网上DIY店铺都可以找得到,后面的万向轮可能就没那么好找啦(图4),市面上没有这么小的万向轮,所以想了个办法:使用一根铁丝和一个小的轴承做成了万向轮,最终系统原理图如图5。
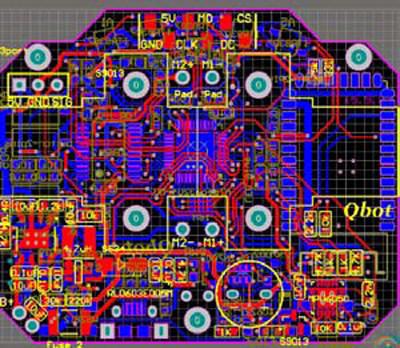
PCB的layout(图6):
软件篇
软件部分主要就是读取传感器的数据,以及老生常谈的PID了。读取光电管的数据有两种方式:数字式和模拟式,分别介绍一下,假设我们的5个光电管是排成一排的,而每个光电管下面如果是黑色(轨迹),则输出的值就很小(因为黑色吸收了光线),反之白色的话就值比较大,这样我们设定一个阈值,ADC大于这个值的话就保存为1,反之为0,于是当我们的车处在不同位置的时候,就得到一个不同的编码(图7)。
可以看到,这个编码,其实就可以量化为一个数字,用这个数字减去正中的编码,就可以得到我们需要的误差了,然后将这个误差输入到PID中进行运算,就可以得到控制电机的输出。原理非常简单,这种数据方式我就称为数字式的输入,与之对应的,我在Qbot中使用的是模拟式的输入。
仔细想想上面这种输入的方式,我们发现现实世界中的情况是没有这么离散的,通过上面的方式我们可以得到5种不同的状态,但是如果车子位于其中两种状态之间呢?这样的话我们就可以取消阈值化的步骤,直接读取所有传感器的值进行加权求和,公式如下:
adc[0] = analogRead(A1);
adc[1] = analogRead(A2);
adc[2] = analogRead(A3);
adc[3] = analogRead(A4);
adc[4] = analogRead(A5);
error = error + 2*adc[0];
error = error + 1*adc[1];
error = error - 1*adc[3];
error = error - 2*adc[4;
這样可以更好地表征误差,大家可以思考一下为什么。
有了误差,其次就是PID了,这个资料数不胜数,就不再啰嗦啦,大家可以直接看提供的源码。
这里贴上我在Nano项目里对PID的介绍:所谓PID就是比例-积分-微分的英文缩写,但并不是必须同时具备这三种算法,也可以是 PD、PI,甚至只有 P算法控制,下面分别介绍每个参数的含义。
首先需要明确一个事实就是,要实现PID算法,必须在硬件上具有闭环控制,就是得有反馈。比如控制一个电机的转速,就得有一个测量转速的传感器,并将结果反馈到控制器中,而在自平衡系统中,常用的有三个控制环 — 角度环、速度环、转向环。
大家可以想象出每个闭环的反馈元件分别是什么吗?对就是上面元件清单里面包含的 IMU(陀螺仪+加速度计)、编码器、摄像头(或者其他可以确定方位的元件比如陀螺仪、磁场计等)。
P(比例):以小车巡线为例,现在需要让小车跟随一条轨迹前进,用PID算法控制方向环,反馈传感器就假设为摄像头。那么小车行进中有这么几种情况:
1.车通过摄像头发现自己处在轨迹的左边,位置误差值为正,那么就需要向右转向,转向值为正;
2.车通过摄像头发现自己处在轨迹的右边,位置误差值为负,那么就需要向左转向,转向值为负;
3.车通过摄像头发现自己处在轨迹的正中间,位置误差值为0,很欢快地笔直前行,转向值为0。
于是我们发现,小车转向值的输出可以简单地通过把位置误差乘以一个系数就得到了,而且显然,误差越大,得到的转向值也越大,符合需求。这里面这个系数,就是P了,而系数具体的大小,需要根据实际情况调试确定。
我们有了第一个公式:
P_term = kP * error
D(微分):还是以小车巡线为例,依然是那车那线那比例。那么小车行进中有这么几种情况:
在P参数的作用下:
1.小车从左边向中间逐渐靠拢,终于它到达了中点……然而,由于惯性,它根本停不下来,于是小车又到了线的右边;
2.小车从右边向中间逐渐靠拢,终于它到达了中点……然而,由于惯性,它根本停不下来!于是小车又到了线的左边。
这跟说好的不一样!于是这个时候D出场了,想想我们期待的效果是啥,我们希望小车到达中点,此时不光位置误差为0,还要转向速度误差也为0。
那么我们设定期望的转向速度为0,此时如果小车转向速度向右的话误差为+,向左为-,再看前面的情况1,小车的转向速度误差为+,我们应该在P之外再给它一个向左的转向力,才能保证它在到达中点时速度不会那么快;情况2类似,此时需要向右的转向力。
也就是说,D相当于给了小车一个转向的阻力,而这个力,又恰好可以通过简单地把转向速度误差乘以一个系数得到,显然,转向速度误差越大,得到的阻力越大,符合需求(值得注意的是这里的转向速度是相对中点的,并不是指小车输出的转向速度,可以理解为“位置变化的速度”)。
我们有了第二个公式:
D_term = kD* (error- last_error)
如果上面的例子还是不好理解的话,考虑前面的单摆模型:
P相当于重力的作用,让摆左右往复运动,而D则相当于空气阻力,让摆慢慢停在中点。D的大小很理想的情况下,应该是大概摆动左右各一下之后就停在中点,想象把摆放在水中摆动的情况。
I(积分):有的时候我们会发现,系统中存在一些固定的阻力,例如,我们用PID控制一个电机的转速,当给定的目标速度很小的时候,就会出现这样的情况:
根据P_term = kP * error,由于error很小,P的輸出也很小,而由于摩擦力的存在,此时并不能让电机转动起来;又由D_term = kD* (error- last_error),由于电机没有转动,显然(error- last_error)始终为0于是D输出也为0,那么问题来了,除非改变目标值,否则电机就永远转不起来了…
I的作用就是消除这样的静态误差,它会将每次的误差都积累起来,然后同样也是乘以一个系数之后作为输出。比如上面的情况,虽然误差很小,但却不是0,于是在每一轮的计算中,I项把error逐渐累积,直到超过临界值让电机转起来;而在误差为0的情况下,I项却又不会帮倒忙。
第三个公式:I_term = kI*(I_term + error)
以上就是PID的全部计算了,最后三者加起来就得到了:
PID_output = P_term + I_term + D_term
每隔一段固定时间把它运行一遍,就是PID算法了。
然后是APP,有对应的库开源了,大家可以试着开发一下。
猜你喜欢
啄木鸟(2022年4期)2022-04-11
科技研究·理论版(2021年4期)2021-09-10
幼儿教育·父母孩子版(2019年5期)2019-10-18
源流(2018年6期)2018-12-03
中国管理信息化(2018年11期)2018-08-28
学苑创造·C版(2018年3期)2018-05-28
发明与创新·中学生(2018年3期)2018-04-17
新少年(2017年1期)2017-03-15
中学生数理化·八年级数学华师大版(2008年12期)2008-12-23
中学数学研究(2008年8期)2008-12-09
