
WSNs中基于RSSI优化的节点定位算法研究
2019-09-19 06:08
测控技术 2019年2期
(淮阴工学院 自动化学院,江苏 淮安 223003)
无线传感网络 (Wireless Sensor Networks,WSNs)[1-2]是由大量的微型、具有通信能力的传感节点组成。目前,WSNs已广泛应用于健康医疗服务、环境监测等应用,而估计传感节点的位置是WSNs应用的基础。
目前,根据定位机制的不同,可将定位算法划分为与距离无关(Range-Free)和距离相关(Range-Based)的定位算法。前者是依据网络的连通性估计未知节点位置,如最短路径 (Shortest Path,SP)定位算法、质心定位算法、跳距矢量(Distance Vector-Hop,DV-Hop)算法等[3]。而后者是先依据测量的距离或角度信息,然后再结合最小二乘、三边测量法等计算未知节点的位置。经典的测距算法有:基于到达时间(Time of Arrival,TOA)[4]、基于接收信号强度指标RSSI[5]、基于到达角度[6]、基于到达时间差(Different Time of Arrival,TDOA)[7]。
由于RSSI测距无需额外硬件设备,被广泛应用于低成本、低开销的无线传感网络,成为室内定位研究的热点。然而,基于RSSI测距算法普通存在较大的测距误差。原因在于:无线信号容易受到传输环境的影响。为此,研究人员提出了不同的对RSSI值进行修正的算法。例如,文献[8]利用高斯分布优化RSSI值。而文献[9]引用粒子滤波算法优化测距,但也增加了一定的运算量。此外,文献[9]和文献[10]分别引用加权均值、卡尔曼滤波优化RSSI值。
为此,基于RSSI改进的混合蛙跳的定位算法(Modifying RSSI Ranging-Based Shuffled Frog Leaping Localization Algorithm,MRSSI-SFL)。MRSSI-SFL算法先多次测量同一点的RSSI值,再利用正态分布优化RSSI值。然后,利用加权质心定位算法估计未知节点位置,并据此位置设置搜索区域,最后利用混合蛙跳算法优化未知节点的位置。实验数据表明,提出的MRSSI-SFL定位算法可有效降低定位误差。
1 RSSI测距原理
由于成本低,RSSI测距被广泛应用。RSSI测距利用所接收的无线信号强度的衰减来估计收/发间的距离。然而,无线信道存在较多的不稳定因素以及多径效应,导致信号强度的衰减与距离的关系存在波动。针对此情况,选择基于对数-常态分布的自由空间损耗模型作为无线信号传播模型。
首先,建立自由空间损耗模型:
PL(d0)=32.44+10nlgd0+10nlgf
(1)
式中,d0、n分别为传播距离、传输路径衰减因子;f为信号频率。
而对数-常态分布模型可表述为
PL(d)=PL(d0)+10nlg(d/d0)+ζn
(2)
式中,PL(d)为传输距离d时的路径损耗,而PL(d0)为当d0=1 m时的路径损耗;ζn为零均值的高斯变量函数。
结合式(1)和式(2),从相离距离为d的节点所接收的信号RSSI:
RSSI=Psend+Pamplify-PL(d)
(3)
式中,Psend、Pamplify分别为发射功率、天线增益。
2 MRSSI-SFL
所提出的MRSSI-LM定位算法先多次测量RSSI值,并利用正态分布函数优化的RSSI值进行测距。随后,利用加权质心算法设定搜索区域,最后利用混合蛙跳迭代算法优化未知节点位置。整个定位过程如图1所示。
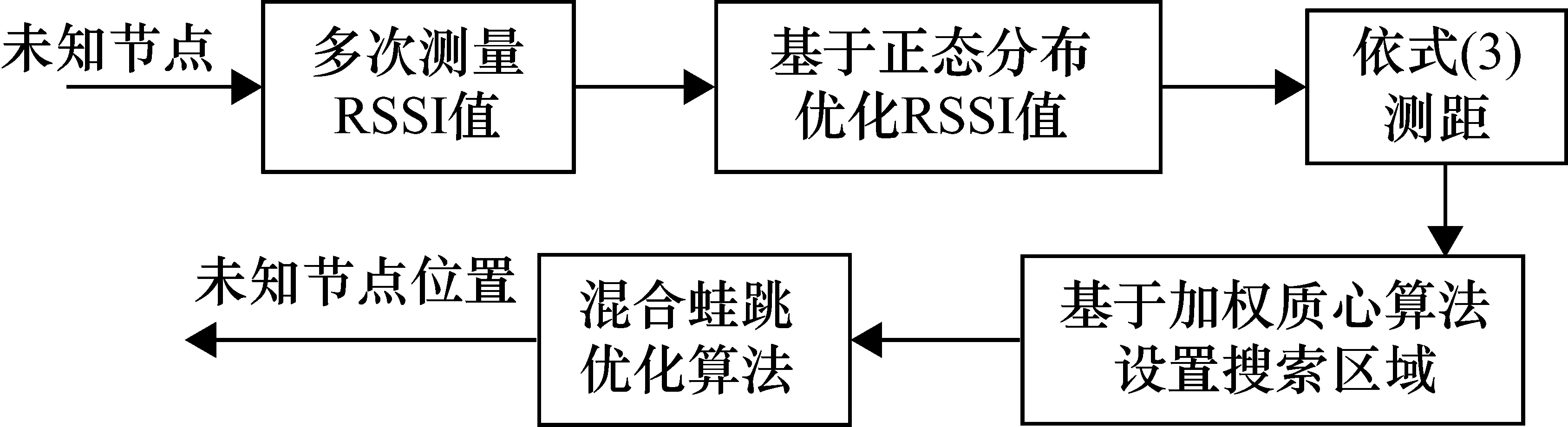
图1 定位框图
2.1 基于正态分布测距
由于无线环境具有多变特性,仅利用单一测量的RSSI值估算距离存在较大误差。为此,需要多测量同一个发射点的RSSI值。MRSSI-SFL算法对同一个地点多次测量,然后利用正态分布计算阈值。假定RSSI1,RSSI2,…,RSSIm表示RSSI的总体样本,相应地,rssi1,rssi2,…,rssim表示对应的样本观测值。据此,可建立似然函数:
(4)
式中,μ、σ2分别为均值、方差。
对式(4)两边取μ、σ2偏导数,可得方程组:
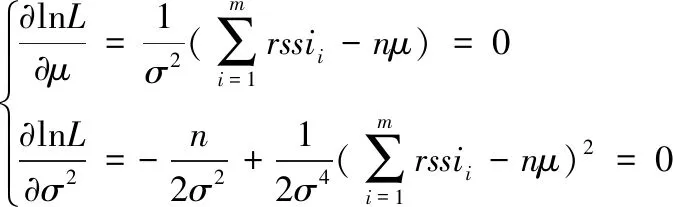
(5)
通过求解式(5)可得μ、σ2的最大似然估计值为
(6)
通过上述过程,便能得到正态分布的均值和方差。最后将RSSI代入式(3)就能实现测距。
2.2 基于质心加权的初始解
通过2.1节获取距离信息后,再选择离未知节点最近的3个锚节点。然后,以未知节点到3个锚节点的距离为半径,以锚节点坐标为圆心画3个圆。3个圆的重叠部分表示未知节点可能在的区域,如图2所示。
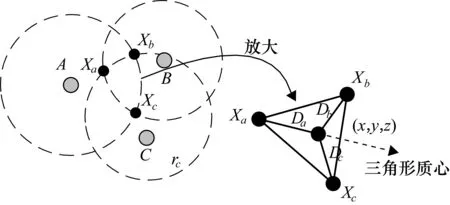
图2 加权质心算法示意图

(7)
式中,ωa=1/(Db+Dc)、ωb=1/(Da+Dc)、ωc=1/(Db+Da)为3个交点的权重。以(x,y,z)为中心,以h为搜索空间的内切球半径构成搜索空间:
(8)
为了提高了定位精度,利用(x,y,z)建立青蛙种群的活动区域,即搜索空间。
2.3 基于混合蛙跳的位置优化
混合蛙跳算法是通过仿效青蛙种群搜索食物的过程,进而完成寻优。此过程包括种群信息交换、子群内部交流。混合蛙跳算法实现步骤如下[12]。
(1) 建立初始种群,种群中候选解个数为P。
(2) 设置适应度函数,并将P只青蛙按适应值进行排序,且从小至大排列。
适应度函数的定义为
(9)
(10)
式中,di为测量距离;k表示与未知节点连通的锚节点个数。
式(9)中的f(x,y,z)表示误差之和,误差越小,定位越准确,其定义为
(11)
(3) 分组。将种群依据交替原则划分为m个子群。
(4) 子群搜索。按顺序搜索每个子群,直到满足子群内的搜索次数。搜索过程如下:
① 先确定最差、最好的青蛙。假定Xb、Xw表示所有子群中最好的青蛙、最差的青蛙。而Xg表示种群的最好青蛙。
② 对最差的青蛙Xw进行更新:
D=C×rand()×(Xg-Xw)+(1-C)×rand()×(Xb-Xw)
(12)
newXw=oldXw+D,Dmin≤D≤Dmax
(13)
式中,C为权重系数,初值为1,并不断更新,如式(14)所示:
(14)
其中Ne、F为子群搜索次数、子群每搜索次数。
③ 用种群最好的青蛙Xg替换Xb,随后,重新计算式(12)~式(14)。
(5) 混合子群。完成了m个子群优化后,就回到步骤②,重新排序。
(6) 检测是否满足迭代次数K,否则就返回步骤(3)。
整个定位流程如图3所示。首先参数初始化,包括候选解个数P、子群个数m、全局信息交换次数为K、子群内搜索次数Ne。然后,测量RSSI,并进行优化,再进行测距,并利用加权质心算法估计未知节点的位置,再设置搜索区域。随后,构建初始种群,再计算每种群的适应度函数。然后,依据混合蛙跳优化未知节点的位置。
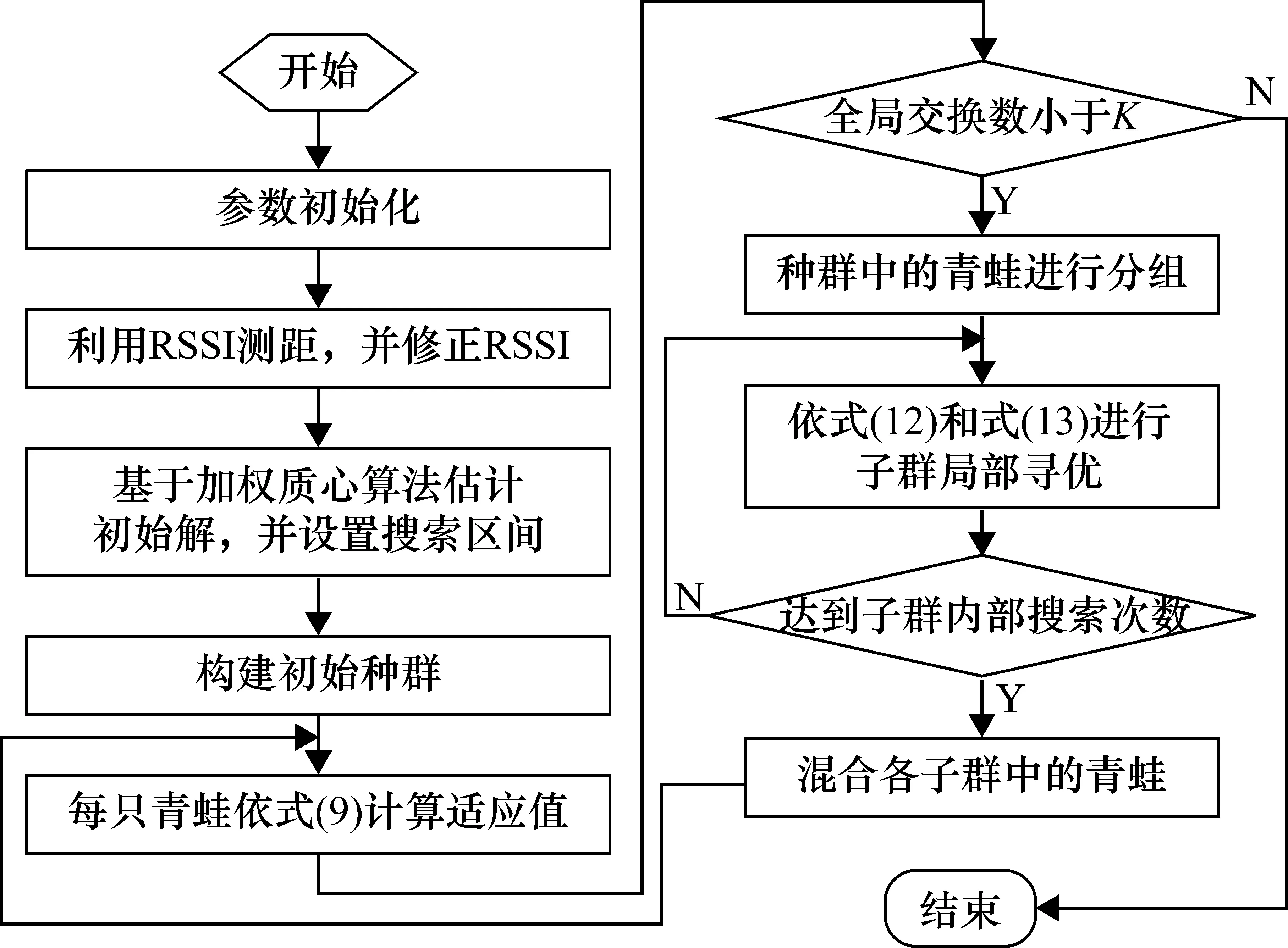
图3 算法流程图
3 仿真实验及分析
为了更好地分析MRSSI-LM算法的定位性能,利用Matlab建立仿真平台。考虑1000 m×1000 m×1000 m的正方体区域,且在此区域内随机部署N=300个传感节点,其中锚节点比例为ρ。即锚节点数Manchors=N×ρ,且0<ρ<1。节点通信半径R=100 m。此外,青蛙子群数为50个,且每个子群内的青蛙数为35只。子群内部搜索次数Ne=50、全局交换信息的次数K=100。
为了更好地分析MRSSI-SFL的定位性能,选择基于RSSI的加权质心定位算法(RSSI+加权质心)作为参照,并进行性能比较,包括定位误差率和定位覆盖率。定位误差率定义为
(15)

3.1 实验1
本次实验分析节点总数对定位误差率的影响,其中ρ=0.3。每次实验独立重复10次,取平均值作为实验数据,如图4所示。
从图4可知,定位误差随节点总数的增加而呈下降趋势,但存在一定的波动。相比于RSSI+加权质心算法,提出的MRSSI-SFL算法的精度得到有效提高。当节点数较大时,定位误差率下降了6%;而当节点数较小时,定位误差率下降至2%。原因在于:MRSSI-SFL算法通过优化RSSI值,提高了测距精度,同时利用混合蛙跳算法优化了定位精度。此外,节点数的增加有利于测距信息的提高,进而降低了定位误差。
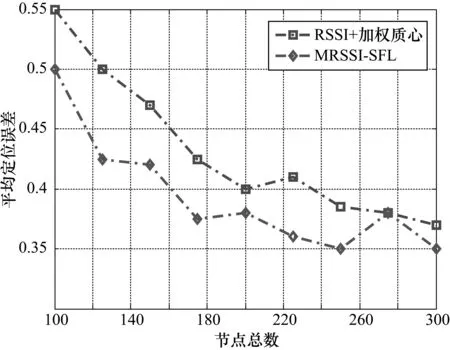
图4 定位误差率
3.2 实验2
本次实验分析锚节点数对平均定位误差的影响。节点总数300,锚节点数从30增加到150,实验数据如图5所示。
从图5可知,锚节点数的增加降低了平均定位误差。原因在于:锚节点数越多,获取的测距信息越准确,这有利于定位精度的提高。与RSSI+加权质心算法相比,提出的MRSSI-SFL算法的平均定位误差得到有效控制,并且随锚节点数的增加而提高。例如,当锚节点数达到150时,MRSSI-SFL算法的平均定位误差比RSSI+加权质心算法下降近9%。
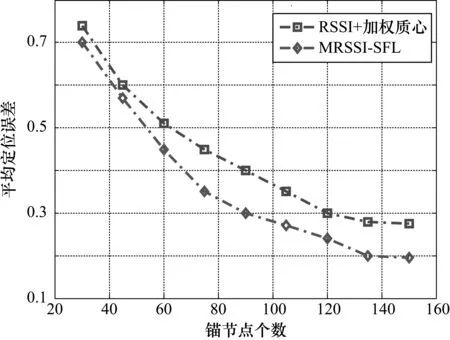
图5 锚节点数对平均定位误差的影响
3.3 实验3
最后,建立实验分析锚节点数对MRSSI-SFL算法的覆盖率的影响,其中节点总数为300,R=100 m、锚节点数从30增加到150变化,每次实验独立重复10次,取平均值作为最终的实验数据,如图6所示。
从图6可知,锚节点数的增加有利于定位覆盖率的提高,当锚节点数达到150时,RSSI+加权质心和MRSSI-SFL算法的定位覆盖率均达到0.9。在锚节点数整个变化区间,MRSSI-SFL算法的定位覆盖率略高于RSSI+加权质心。这也说明,MRSSI-SFL定位算法在估计未知节点位置时,对锚节点的分布要求较低。
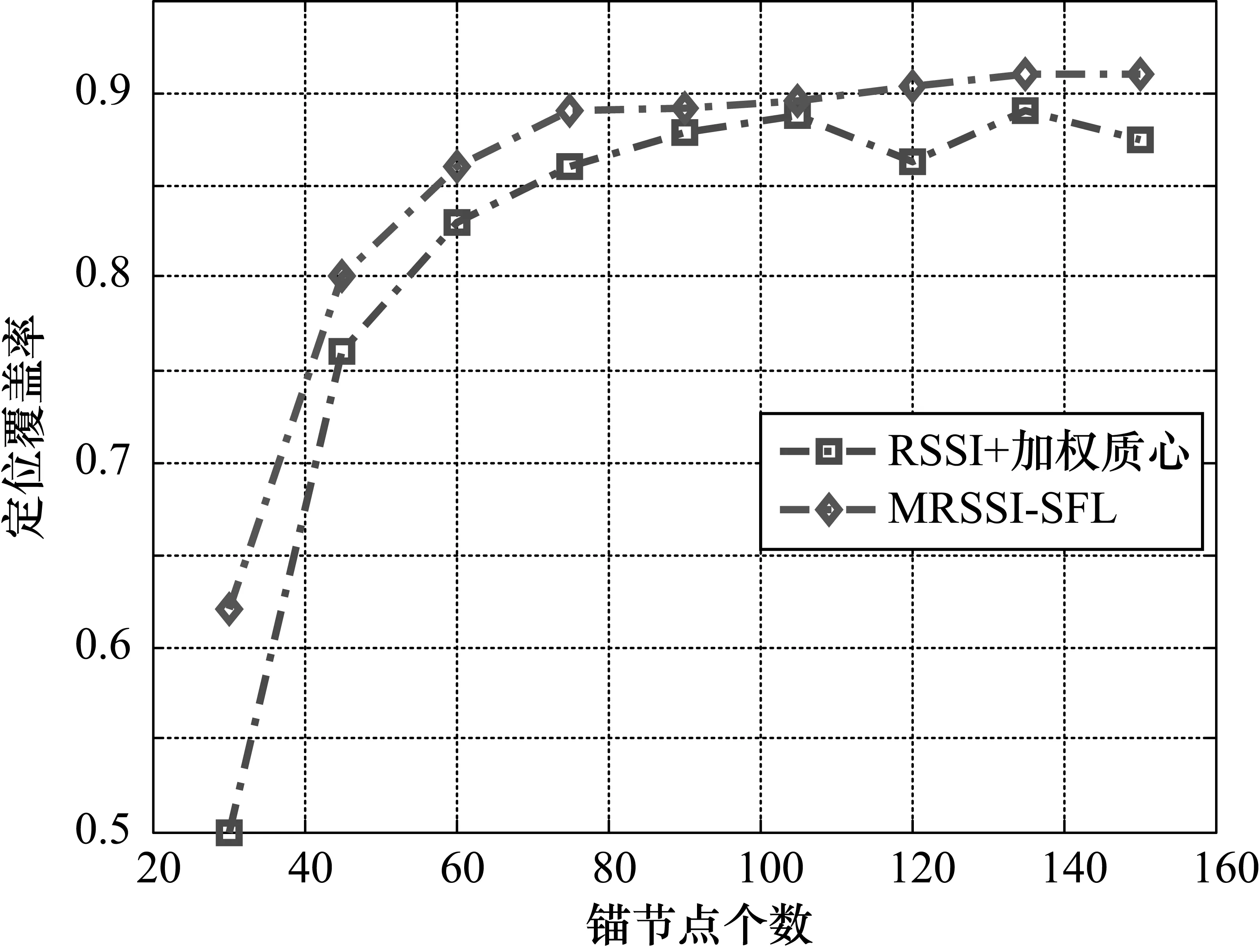
图6 锚节点数对定位覆盖率的的影响
3.4 实验4
本小节用运行时间数据分析算法的复杂度,如表1所示。从表1可知,提出的MRSSI+SFL算法的运行时间略高于RSSI+加权质心算法,约0.07 s。这说明,MRSSI+SFL算法在提高定位精度的同时,并没有加大算法的复杂度。

表1 算法的运行时间
4 结束语
针对WSNs的传感节点问题,提出基于RSSI改进的混合蛙跳的定位算法(MRSSI-SFL)。MRSSI-SFL先优化RSSI值,提高测距数度。然后,再利用加权质心定位算法估计未知节点位置,并将此位置作为蛙跳算法迭代的初始值,通过迭代,提高未知节点位置的精度。实验数据表明,提出的MRSSI-SFL算法相比RSSI+加权质心算法,其定位精度得到有效提高,也提高了定位覆盖率。后期,将进一步优化定位算法,降低算法的复杂度。
猜你喜欢
数学年刊A辑(中文版)(2022年1期)2022-08-20
体育教学(2022年4期)2022-05-05
数学年刊A辑(中文版)(2021年4期)2021-02-12
科学(2020年3期)2020-01-06
汽车实用技术(2018年5期)2018-03-20
电子制作(2017年7期)2017-06-05
娃娃画报(2016年5期)2016-08-03
中央民族大学学报(自然科学版)(2016年2期)2016-06-27
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
太空探索(2014年1期)2014-07-10
