
超磁致伸缩作动器激光干涉位移测量系统
2019-09-20 07:35孟建军23
测控技术 2019年2期
孟建军23 白 欢 杨 杏
(1.兰州交通大学 机电工程学院,甘肃 兰州 730070; 2.兰州交通大学 机电技术研究所,甘肃 兰州 730070;3.甘肃省物流及运输装备信息化工程技术研究中心,甘肃 兰州 730070;4.西安铁路职业技术学院 牵引动力学院,陕西 西安 710014)
铁磁材料在交变磁场的作用下长度和体积发生微小应变的现象称为磁致伸缩效应。磁致伸缩系数高于10-3的材料叫作超磁致伸缩材料(Giant Magnetostrictive Material,GMM),超磁致伸缩作动器(Giant Magnetostrictive Actuator,GMA)是其重要应用领域之一[1]。超磁致伸缩作动器的位移是对其测量和控制的主要物理量之一,而该位移在微米级,因此对其精确测量至关重要。在位移的测量方法中,最早采用应变片和惠斯通电桥的电阻法,这种方法已经较少采用。迈克尔逊激光干涉仪发展至今,已经广泛应用于长度、位移、表面轮廓和表面粗糙度等的测量[1-3]。干涉仪的优点是以光的波长作为度量单位,具有很高的分辨率,为精确测量提供了有力的工具[4],被用于传感器的标定。基于上述优点,迈克尔逊干涉仪在振动测量中得到了广泛应用[5]。但是,这种干涉仪也有其固有的局限性,分立元件迈克尔逊干涉仪有极高的环境条件和调整要求,对温度、湿度、环境振动、仪器变形和空气扰动敏感[6-7]。为了使参考光和测量光的光程相等,必须在光路中安装反射镜调节光路。此外,干涉光传播中两次经过分光镜,造成一定的能量损失,加之光学器件本身的损耗,导致干涉信号强度降低,对光电探测器的灵敏度提出了更高的要求,这不仅影响了测量精度,甚至导致测量失效[8-9]。此外,常用的条纹计数法还可以进一步细分以提高测量精度。
本文结合工程应用,采用全光纤干涉仪代替分立元件迈克尔逊干涉仪,借助高分辨率动态信号采集卡对光电探测器的输出信号采样,在LabVIEW虚拟仪器软件中用贝塞尔函数对干涉条纹细分处理以提高精度,设计了超磁致伸缩作动器激光干涉位移测量系统。
1 激光干涉法位移测量原理
激光是一种电磁波,用于振动测量的激光近似平面光波。平面光波的波动方程为
(1)
激光干涉原理示意图如图1所示,由激光器、分光棱镜、参考镜、测量镜和探测器组成,参考镜又称定镜,测量镜也称动镜,分光棱镜为半透半反分光镜。
为了测量位移,在被测物体与激光器的光路上安装分光镜,从激光器发出的激光经过分光镜反射至被测物体上的测量镜,再由测量镜反射,透过分光镜进入光电探测器,光程为l1。当物体产生位移Δx时,激光器与被测物体的光程变为l1+Δx,对应的波动方程为
图1 激光干涉原理示意图
(2)
式中,y1为测量光的瞬时值。
假设被测物体以振幅Xm、频率ω0、时间t、位移x=Xmsinω0t的简谐振动对光波振动的相位进行调制,波动方程和光强分别为
(3)
(4)
式中,I1为测量光的光强。
尽管物体的振动起到了相位调制的作用,但是这种调制方法的载波仍然是光波,而光波的频率高达105GHz,光电探测器无法达到如此高的频率响应[10]。
为了实现振动信号的光波解调,激光器发出的同一激光束经分光镜透射到参考镜,然后再经分光镜反射进入光电探测器,光程为l0,其波动方程为
(5)
式中,y0为参考光的瞬时值,参考光和测量光两者光源相同,振幅相等。因混频产生激光干涉,干涉条纹的光强为
(6)
式中,I为干涉条纹的光强。
干涉后的光强中,消去了高频项ωt,光电探测器能够响应振动位移的相位调制信号。
2 系统方案
2.1 全光纤迈克尔逊干涉仪
为了克服空气受环境条件影响所导致的空气光程差的变化,本测量系统采用全光纤干涉仪。全光纤迈克尔逊干涉仪示意图如图2所示,包括激光器、偏振器、3 dB耦合器、检偏器、探测器、参考臂和测量臂。用3 dB耦合器(分光比50∶50,插入损耗3 dB)代替分光镜,光纤代替了空气光程,以敏感光纤作为相位调制元件。激光束经偏振器起偏后进入耦合器分为两束,由参考臂和测量臂反射回来后进入检偏器。这种全光纤结构不仅消除了诸多环境条件敏感因素干扰的影响,而且避免了测量前须光路校准、角度垂直等费时烦琐的准备工作,扩大了干涉仪的使用范围,应用延伸到许多传统干涉仪的禁区,适用于现场测量。

图2 全光纤迈克尔逊干涉仪示意图
2.2 硬件方案
硬件方案示意图如图3所示,由作动器、驱动电源、接口电路、数字和模拟信号发生模块、计算机和激光干涉仪组成。作动器由驱动电源驱动,产生振幅和频率可调的简谐振动,测量角棱镜安装在作动器输出杆表面反射干涉仪发出的激光束。驱动电源主要由全隔离整流模块、交流负反馈模块和IGBT模块组成,产生幅值和频率稳定的功率脉冲。接口电路进行电平转换和信号放大,输出脉冲信号和电压信号,是连接驱动电源和信号发生模块的转换电路。
图3 硬件方案示意图
数字和模拟信号发生模块通过USB接口连接计算机,由计算机控制产生幅值固定、频率可调的脉冲信号,以及高低可以调节的电压信号,但其没有足够的驱动能力,因此需由接口电路进行转换。干涉仪产生的拍频信号和测量信号双通道输入至动态数据采集模块。动态数据采集模块采用PCI接口与计算机连接,同步数据采集所需的同步信号由数字和模拟信号发生模块提供,干涉仪输出的交流信号在动态数据采集模块内部经放大、整形后同步采样,由LabVIEW软件进行数据运算处理。
激光迈克尔逊干涉仪选用丹麦B&K公司的LDV8329,动态数据采集模块采用台湾凌华科技的PCI-9527,数字和模拟信号发生模块采用USB-1902。
3 数据处理与软件设计
3.1 干涉条纹与位移的关系
迈克尔逊干涉仪中,参考光波和测量光波具有相同的幅值和频率,测量光波的相位由于物体振动被调制而与参考光波产生相位差,因此,这是一种典型的零差测振法。
在本测量系统中,超磁致伸缩作动器以x=Xmsin(ω0t+φ0)作简谐振动,其中φ0为初相位。静止时光程l0与l1相等。测量光的瞬时光程为
l1=l0+Xmsin(ω0t+φ0)
(7)
这说明测量光的光程随着振动在变化,干涉系统的瞬时光强为
(8)
光电探测器输出的交流电压信号为
(9)
式中,U、u分别为交流电压信号幅值和瞬时值。

(10)
由此可见,作动器的位移Xm与干涉条纹的个数n存在线性关系。把简谐振动信号经过整形后作为计数器的门控制信号,触发计数器计数,一个周期内的计数值n,代入式(10)计算得到作动器的位移Xm,这种方法称为干涉条纹计数法[11]。
3.2 数据采集与处理
数据采集采用音频、声学和振动专业测试的24位高性能同步动态信号采集卡PCI-9527,采样率为432 kS/s,交流耦合输入模式,编程输入范围-10~+10 V。数据采集卡的模拟信号输入端同步采集光电探测器输出的交流电信号,由LabVIEW软件用贝塞尔函数法进行分析处理。
超磁致伸缩作动器简谐振动的位移表达式为x=Xmsin(ω0t+φ0),对应光电探测器输出的电流信号为
(11)

第一类n阶贝塞尔函数Jn(x)为[12]

(12)
式中,n为贝塞尔函数的阶;a为正整数;m为1~+a的正整数。第一类贝塞尔函数曲线图如图4所示。
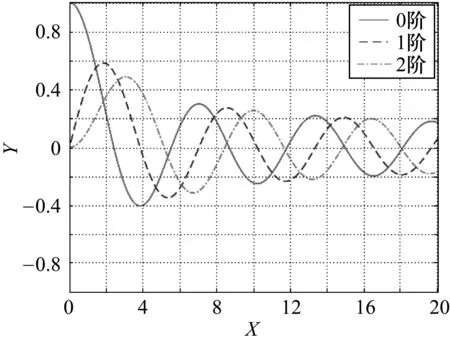
图4 第一类贝塞尔函数曲线图
由图4可知各阶曲线的零点互不重合,同阶相邻的零点之间总包含不同阶的零点,幅值随时间呈衰减趋势。利用贝塞尔函数展开式(10),其中
(13)
(14)
计算机处理数据时,如果xnm表示Jn(x)的n阶第m个零点,则用下列近似公式计算贝塞尔函数的零点。
(15)
(16)
B=4m2
(17)
C=7B-31
(18)
D=83B2-982B+3779
(19)
E=6949B3-153855B2+1585743B-6277237
(20)
用近似式(15)~式(19)计算n阶第m个零点,贝塞尔函数的零点Jn(xnm)=0,如表1所示。
3.3 软件流程设计
软件流程图如图5所示。软件开始运行,首先进行系统初始化,初始化过程包括:波长设定、输入通道设置、输入耦合方式设置、模拟输入范围程序控制和采样率设置。系统默认激光波长为0.6328 μm,波长可以通过软件设置,以提高软件的通用性。初始化完成后,执行零点校准,消除电路静态噪声对测量结果的影响。参数设置包括频率设定和电流设定,设定驱动电源的输出电流,实现输出电流在1~30 A的范围内以步长0.1 A步进调节,控制作动器的输出位移,频率设定控制驱动电源的开关频率在1~400 Hz范围内以步长0.1 Hz连续可调,从而改变加在作动器的功率脉冲,使作动器驱动线圈产生交变磁场,按设定的频率作简谐振动。系统启动、延时等待,驱动作动器的开关电源电流和频率从暂态过程进入稳定状态需要一个过渡过程,这个过程需要控制频率,特别是电流的上升率,避免作动器电流上升速度过快造成开关电源瞬间过载,对电源和负载带来过大冲击甚至过载损坏。
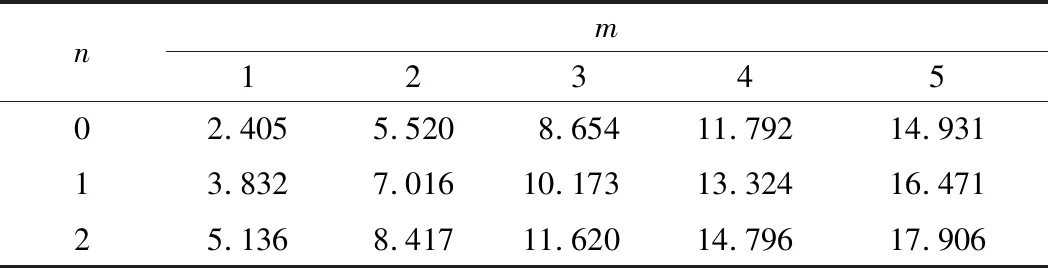
表1 贝塞尔函数的零点Jn(xnm)=0
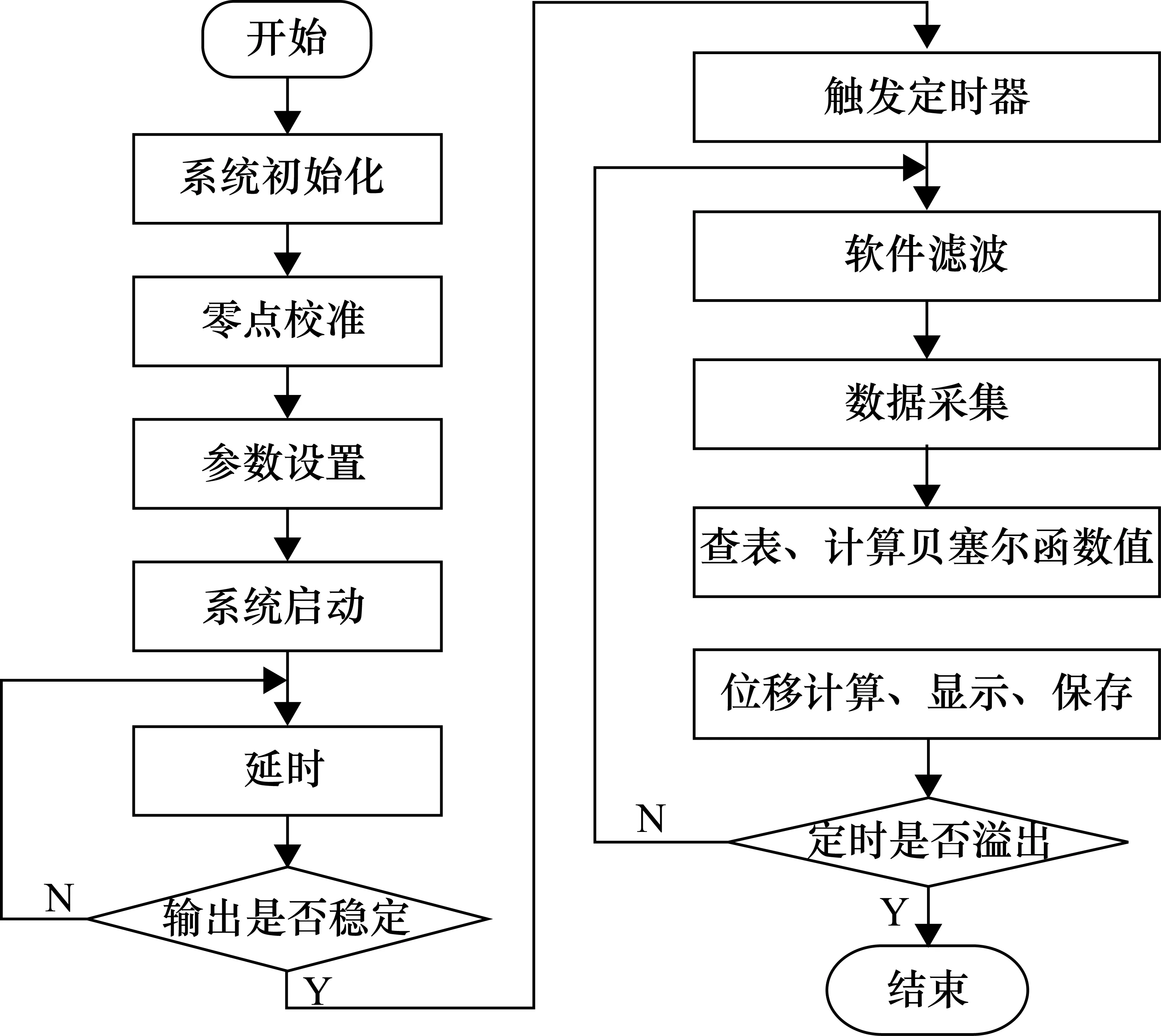
图5 软件流程图
作动器电流和频率稳定后,定时器立即触发,定时开始;光电探测器输出的电信号由LabVIEW软件滤波,抑制交流信号中叠加的高频分量,保留低频分量;数据采集按照设定的采样率对振动的位移信号进行同步采样,以时间序列把每一个采样点保存到映射的寄存器中,进行后续处理;贝塞尔函数0、1、2阶对应的5个零点记录在一个二维表中,按照3.2节所述的数据处理算法以固定周期查找函数表,计算贝塞尔函数值;瞬时位移测量本身需要的时间很短,但是,作动器的简谐振动在实际的工作环境下不可避免地受到外界各种扰动的影响,瞬时测量的位移数据无疑是不稳定的,随着测量时间的增加,样本函数的数量也相应增加,测量结果无限趋近数学期望,最终得到数据可靠的作动器位移值;定时器触发到一个测量步骤完成,自动判断定时器是否溢出,选择程序运行进入下一个循环或结束。
4 实验结果及误差对比
4.1 实验结果
超磁致伸缩材料是作动器的核心元件,超磁致伸缩作动器的机械参数和驱动电源的电气参数如表2所示。驱动电源输出频率1~400 Hz,步长0.1 Hz,驱动电流1~30 A,步长0.1 A步进调节,作动器在驱动电源发出的功率脉冲激励下,做简谐振动。
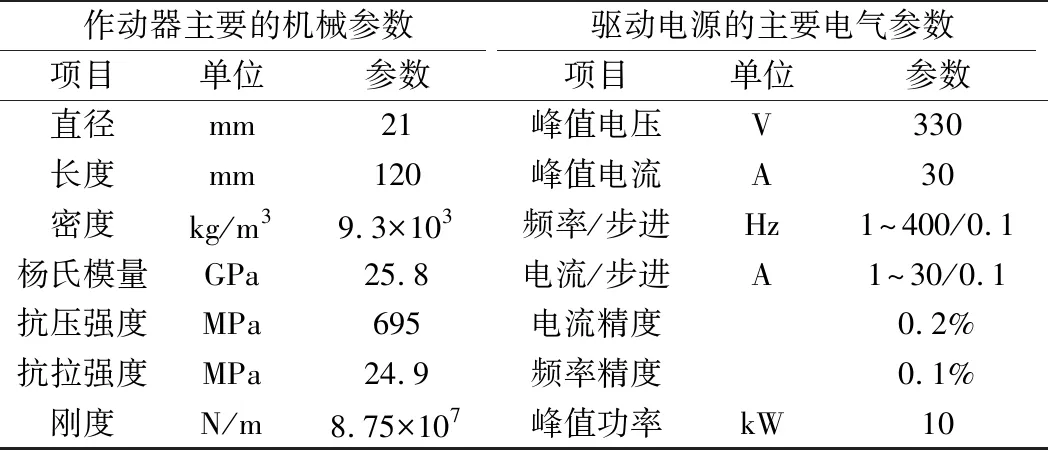
表2 超磁致伸缩作动器的机械参数和驱动电源的电气参数
施加一定频率和电流的功率脉冲,使作动器做简谐振动,用激光干涉法测量超磁致伸缩作动器在不同频率和电流下的位移,每个测量点记录对应的位移值,以分析频率、电流与位移之间的关系。
不同频率和电流下的超磁致伸缩作动器位移值如表3所示。
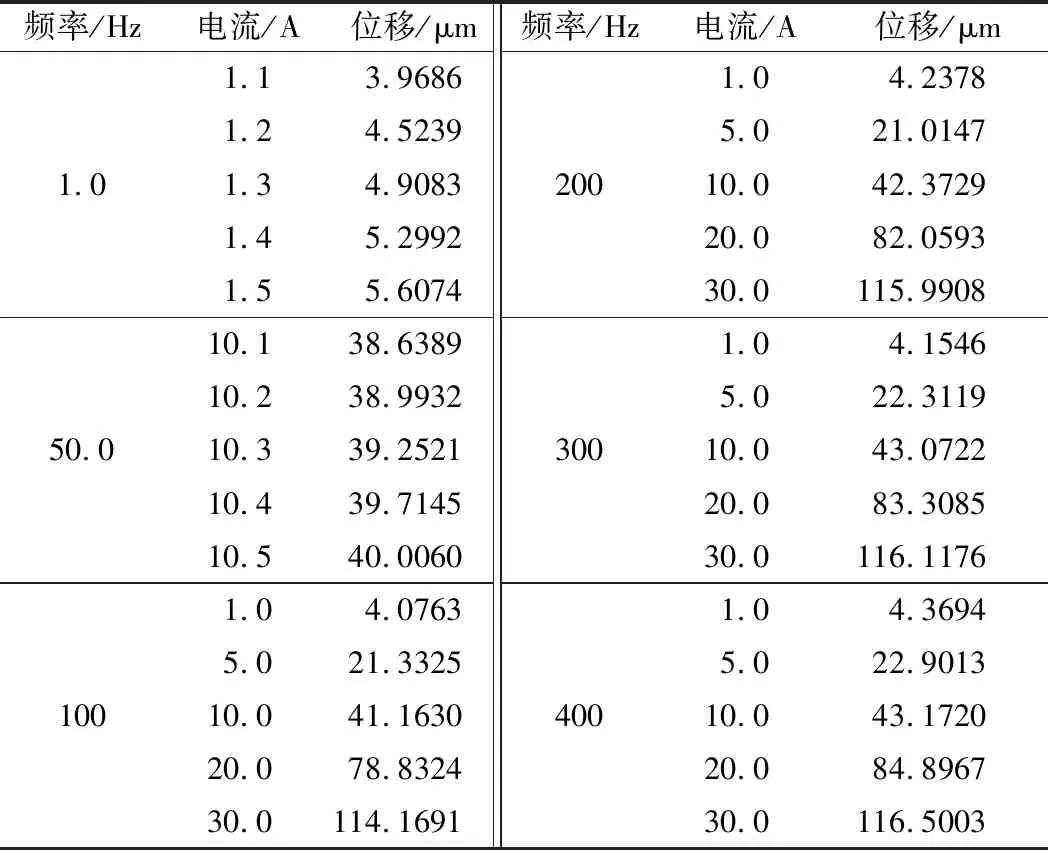
表3 不同频率和电流下的超磁致伸缩作动器位移值
在1 Hz和50 Hz频率点,电流以0.1 A的步进递增,位移随着电流的增大小幅增大;在100 Hz、200 Hz、300 Hz和400 Hz频率点,分别取电流1 A、5 A、10 A、20 A、30 A,位移随着电流的增大而大幅增大,随着频率的增高也略有增大。测量结果表明,作动器的位移与电流大致呈递增的近似线性关系。
4.2 误差对比
激光干涉仪的主要误差源对测量系统的不确定度有直接影响,光电探测器输出的电信号经数据采集卡采样也会存在误差。 这些主要误差源有:激光频率不稳定造成的光源误差;测量光轴与反射镜面不垂直引起的余弦误差;动态信号采集卡固有的转换误差。
(1) 光源误差。
超磁致作动器位移激光干涉法测量以光的波长作为度量单位,由于激光频率不稳定而造成的波长误差为Δλ=±0.5×10-5μm,λ=0.6238 μm,光源误差为
(2) 余弦误差。

(3) 转换误差。
动态信号采集卡程控模拟输入范围为-10~+10 V,绝对误差为ε3±0.2 mV,其相对误差为
测量系统相对误差为
实际测量值与理论计算值对比如图6所示。实际测量值和理论计算值之差与理论计算值相比较,得到测量系统实际的相对误差为0.056%,说明实际测量相对误差与理论计算相符,表明测量结果准确可靠。
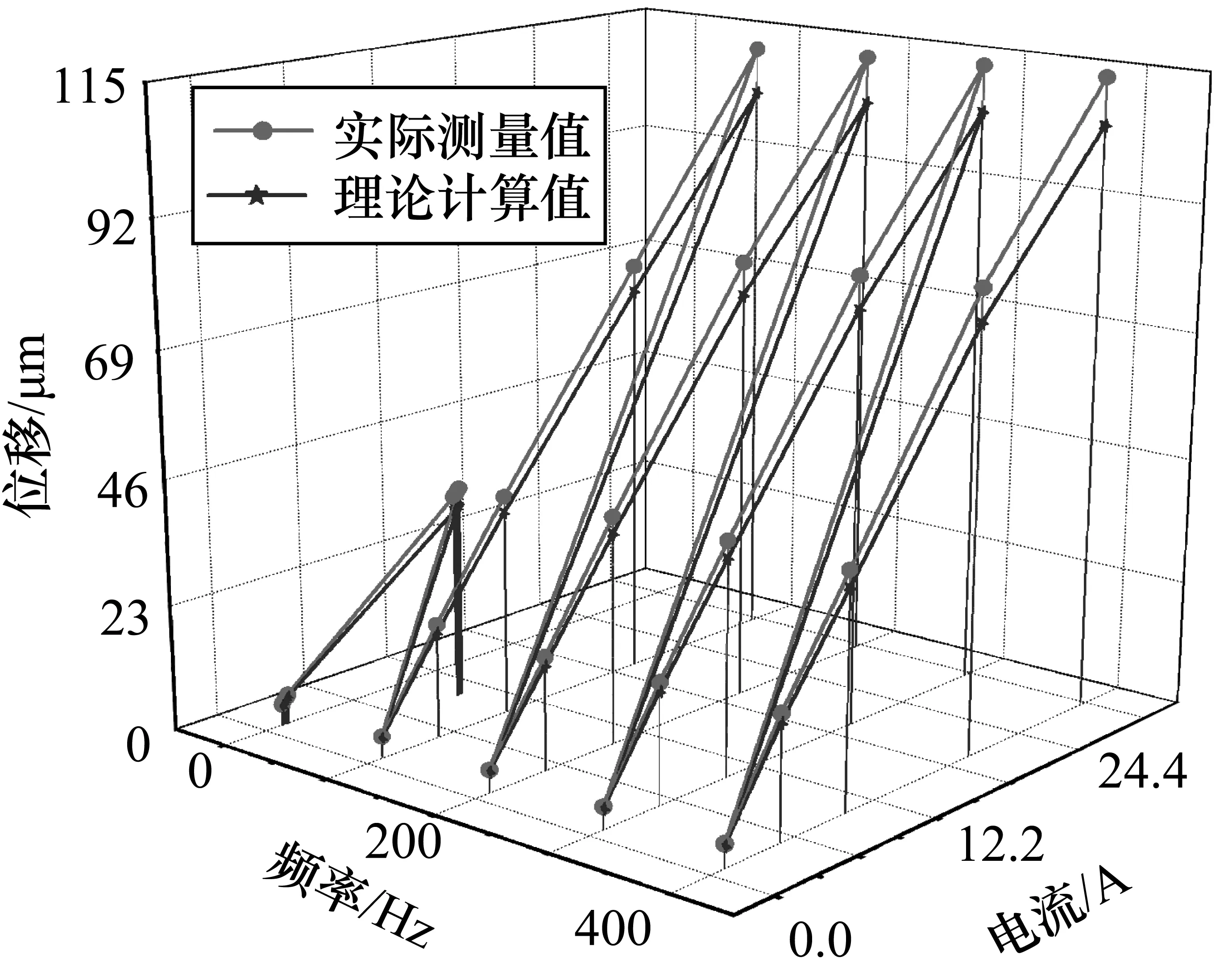
图6 实际测量值与理论计算值对比
5 结束语
采用全光纤激光干涉仪和高性能同步动态信号采集卡,配合LabVIEW测试软件,应用贝塞尔函数的干涉条纹细分技术的超磁致伸缩作动器激光干涉位移测量系统,克服了分立元件迈克尔逊激光干涉仪环境要求高、调整繁琐和易受干扰的缺点。与条纹计数法相比,贝塞尔函数法的测量精度更高,该系统适用于超磁致伸缩作动器位移的实验研究和现场测量,可为微位移的测量提供一种参考方法。
猜你喜欢
物理学报(2022年18期)2022-09-30
九江学院学报(自然科学版)(2022年2期)2022-07-02
农业工程学报(2022年6期)2022-06-27
少儿科技(2021年3期)2021-01-20
计测技术(2020年6期)2020-06-09
制造业自动化(2019年9期)2019-09-27
航天电子对抗(2019年4期)2019-06-02
制导与引信(2017年3期)2017-11-02
大学生(2017年9期)2017-09-08
西安航空学院学报(2017年3期)2017-07-05
