
基于多参数逻辑门限值控制与瞬时优化控制的 自适应控制研究
2019-09-21 03:45周伟熊演峰
汽车实用技术 2019年17期
周伟,熊演峰
(1.仁寿县龙正镇人民政府,四川 仁寿 620562;2.长安大学,陕西 西安 710064)
引言
虽然国内新能源政策补贴倾向于发展纯电动汽车,但是由于电池能量密度、寿命等因素,现阶段“里程忧虑”、成本高昂等问题普遍存在,因此HEV/PHEV 车辆将存在较长一段时期。考虑HEV 车辆按照现有政策定位于节能车,不享受财政补贴,商用车领域近期基本没有产品,本文主要集中于PHEV 商用车整车控制上。国内PHEV 商用车主要集中在城市公交领域,整车控制的目标是在节能基础上兼顾驾驶性。其中从驾驶员意图识别角度着手,主要通过加速踏板、制动踏板体现,通过发动机-电机实现扭矩协调,实现驾驶性;其中从全局优化角度,实现电池-发动机的能量协调。混合动力系统控制是在全工况下的控制优化,是对瞬时工况下各个动力源的积分效应。本文主要基于工程可实现化最高的多参数逻辑门限值控制,结合瞬时优化控制开展自适应控制研究。
HEV/PHEV 作为一种双能源车辆,通过协调发动机和电机的工作状况,可以使发动机始终工作在最佳效率区域。近年来常用控制策略基本上可以分为下述几种:
1 基于规则的逻辑门限值控制策略
基于规则的逻辑门限值控制策略以“基于规则的功率管理策略”为代表,该方法简单实用,在发动机和电机特性以及循环工况一定的情况下能获得较为理想的效果,目前被普遍采用。但其门限值事先设定并且是固定值,因此对工况及参数漂移的适应能力差,无法获得整车系统的最大效率。
2 基于模糊控制的智能型控制策略
基于模糊控制的智能型控制策略比较符合人的逻辑思维,在混合动力汽车中应用比较合适,以 Sugeno-Takagi 模糊控制模型为基础设计的模糊逻辑控制器,具有鲁棒性好的特点,但缺乏自适应或自学习的能力。
3 基于优化算法的动态控制策略
基于优化算法的动态控制策略较多采用贝尔曼动态规划理论进行全局优化,该算法考虑循环工况的动态变化,具有实时选择发动机、电机工作状态最优点的功能,能综合实现最佳燃油经济性和排放。但是,这种方法优化过程复杂,需要大量运算,导致其实现起来有一定的困难。
上述算法实际工程使用中需考虑现有产品整车控制器计算能力,因为计算量缘故,方案一现运用普遍,方案二也有体现,方案三实际产品中基本很少应用。依托12 米混合动力客车双电机方案产品开发项目开展相关研究,其中动力系统构型具体如下:

图1 混合动力客车双电机方案
整车参数详见表1。

表1 整车参数
动力系统相关参数详见表2。
混合动力客车双电机方案整车控制器 HCU 通过CAN 网络与各个总成、控制器进行通讯,接收各总成上报的状态和故障信息,并通过采集整车钥匙门、加速踏板和制动踏板开度等信息,综合分析当前整车状态以及驾驶员的需求对各总成发出控制指令,实现整车的各项功能,HCU 的控制接口如图2 所示。

表2 动力系统参数
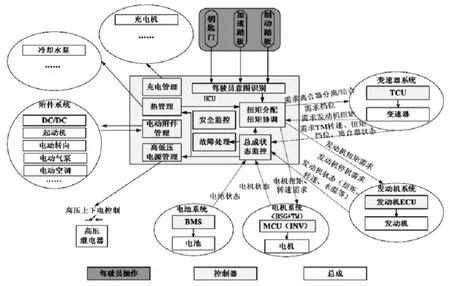
图2 HCU 控制接口
根据整车配置及HCU 接口定义,确定HCU 具备以下6 项基本功能:高低压电源管理、行驶控制、热管理、附件控制、人机接口和充电功能,详见图3。
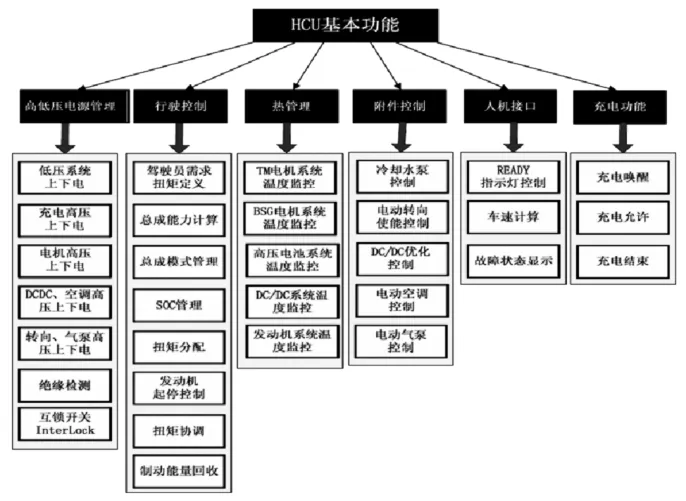
图3 HCU 基本功能
在动力系统的匹配与控制中,TM 电机功率略大于BSG 电机,混合动力系统的助力、纯电动驱动和制动能量回收主要依靠TM 电机,把BSG 电机解放出来主要用于起/停发动机和怠速充电。因此,通过协调控制各动力总成工作状态,可充分发挥BSG、发动机和TM 电机特性,提高混合动力系统的经济性和动力性。因此对混合动力客车双电机方案工作模式进行划分,主要包括停车模式、发动机启停模式、怠速暖机模式、怠速充电模式、纯电动模式、发动机单独驱动模式、行车发电模式、联合驱动模式、滑行能量回收模式、制动能量回收模式等,在各种工况下发动机、BSG 电机和TM 电机的工作情况,详见图4。

图4 各模式总成工作状态
混合动力客车双电机方案整车控制技术按照整车功能及内容可以分为以下四大类:整车功能模式集成化管理、整车功能模块化、基于效率最优的能量管理和基于底层向量的故障诊断,本文主要集中在基于效率最优的能量管理上。
基于效率最优的能量管理主要是指提高动力系统在实际工况中的工作效率问题,这是一个复杂的系统问题,需要综合论证分析混合动力系统的构型,研究混合动力系统的参数优化匹配与控制,使开发的混合动力系统自动适应各种道路工况和不同驾驶员的驾驶习惯,无论在怎样的道路工况与驾驶员需求功率下,动力系统动力源都能工作在高效区。同时该方案作为产品开发必须基于现有产品HCU 资源,现有产品HCU 主要参数具体如下:

图5 产品HCU 三维

表3 HCU 性能参数
因此基于现有产品HCU 能力,在达成节油目标前提下,尽可能减少计算需求是很有必要。而基于多参数逻辑门限值的瞬时优化控制策略的基本思想是:将易于用门限值确定工作模式的区域提取出来,避免复杂的瞬时优化算法,提高系统的响应速度,关键是各个门限值的确定。其他区域内则通过瞬时优化算法自适应寻优,确定发动机和电机各自的扭矩输出,决定发动机驱动模式是由发动机单独驱动还是发动机驱动并充电。将逻辑门限值方法的简单高效性与瞬时优化算法的优点结合起来。
由混合动力客车的双电机构型特征可知,该车具备混合动力汽车的所有功能,整车的基本控制策略是汽车在原地起步加速阶段采用纯电动运行,避免采用发动机起步加速带来的动态油耗和排放;在中等需求功率阶段,切换到纯发动机运行模式;当需求功率增大到一定程度时加上电动机进行助力;在低负荷工况当电池 SOC 不够时发动机通过串联发电向蓄电池充电;在低制动强度减速阶段,采用发电机再生制动回收制动能量。
在各种驱动模式选择及切换过程中,为实现整车系统效率最优的目标,我们采用工程可实现化最高的多参数逻辑门限值控制方法,同时结合瞬时优化控制实现自适应控制,实现整车性能的最优,具体工作分为纯电动工作算法、混合动力工作算法、基于系统效率的扭矩分配。
4 纯电动工作算法
整车纯电动工作区间计算模块中,选取了驾驶员需求扭矩、车速和电池SOC 三个主要参数作为逻辑门限值,计算出整车纯电动工作区域,见图5 所示。基于以上整车纯电动区间控制策略,可以在满足驾驶员需求及电池电量平衡的前提下,尽可能扩大整车纯电动工作区间,提高整车系统效率,改善整车经济性。

图5 纯电动工作区划分
另外,整车控制策略中还特别设置了当整车急加速或电机纯电动可用扭矩不足(如高压系统故障)时,整车提前退出纯电动工作模式的策略,从而提高整车各种环境及使用工况下的适应性。
5 混合动力工作算法
当整车驾驶员需求扭矩超过电机最大纯电动扭矩上限且整车车速超过纯电动车速门时,需要整车控制器首先控制BSG 电机启动发动机,然后整车退出纯电动工作区间并进入发动机工作区间;当驾驶员需求扭矩超出发动机高效区上限时,整车进入联合助力区,由TM 电机助力,补充发动机扭矩不足;同时当滑行或制动减速时,进入制动能量回收区,由TM 电机发电并将整车动能转化为电能存储到高压电池中,整车各工作区间划分见图6 所示。

图6 整车工作区间划分及发动机工作点优化控制
混合动力控制策略具体如下:当外界负荷落在发动机工作区时,根据发动机燃油消耗、电机等效燃油消耗和发动机排放组成的目标函数决定动力源,进行瞬时优化自适应控制。由发动机独自提供驱动力、发动机是否驱动电机对电池充电取决于SOC 和电机、电池的充电效率,进行自适应寻优。当外界负荷落在联合助力区时,发动机发出最大扭矩,电机提供剩余扭矩,进行联合驱动。
6 基于系统效率的扭矩分配
混合动力客车双电机方案基于系统效率的扭矩分配策略见图7 所示,首先HCU 根据车速及踏板开度查表计算出驾驶员需求扭矩,然后综合考虑电池SOC 和整车各项性能选取动力总成工作模式,并最终计算出各工作模式下整车控制器对发动机和电机的控制扭矩需求,从而完成整车行驶过程中的扭矩分配。
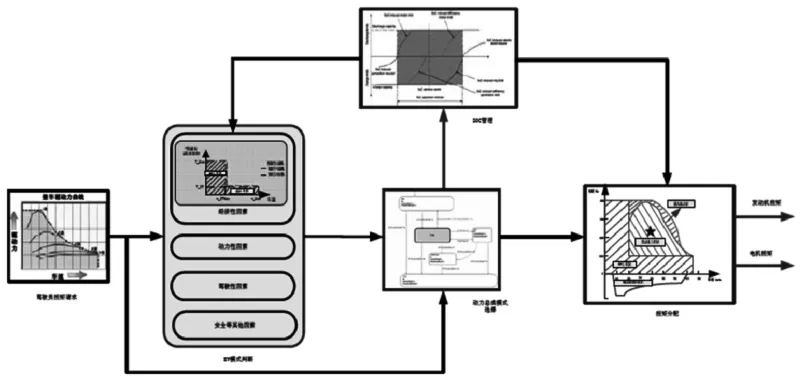
图7 基于系统效率的扭矩分配
由于整车扭矩分配控制策略中涉及多个模块,各模块通常包含多个控制参数,且各个参数间又有着一定的耦合关系,因此整车各工况下基于系统效率的参数优化便显得尤为重要。通过仿真软件的离线仿真可以快速优化整车性能,给出控制参数的优化组合及区间,而实车转毂及道路标定试验,则是优化整车性能,确定整车控制参数最为直接且有效的手段,通常也需要较长的时间。
7 结论
基于MATLAB/Simulink 环境下建立了控制策略仿真模 型,并在后续产品实车进行验证,依据中国城市综合工况实际油耗数据为19.64L/100km,达成预期目标。与基于优化算法的动态控制策略相比,较大程度上减少计算量,更易于工程实现;与传统逻辑门限值控制策略相比,计算量有一定增加,但是具有较高的燃油经济性。所以下一步工作可以考虑在产品HCU 计算能力满足前提下,保证算法实用性的基础上对模型进行进一步完善,同时适当引入现代智能控制方法,进一步地提高燃油经济性并降低排放。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年13期)2022-07-19
汽车实用技术(2022年12期)2022-07-05
汽车实用技术(2022年2期)2022-02-21
汽车零部件(2021年2期)2021-03-05
宇航计测技术(2020年4期)2020-09-10
北京汽车(2018年5期)2018-11-07
汽车与安全(2017年4期)2017-12-07
投资北京(2017年1期)2017-02-13
