
基于光纤传感技术的轨道占用监测系统设计
2019-09-24 08:50
石家庄铁道大学学报(自然科学版) 2019年3期
(石家庄铁道大学 电气与电子工程学院,河北 石家庄 050043)
0 引言
随着高速铁路的快速发展,轨道占用的实时性检测变得尤为重要,它直接关系着行车安全。安全问题是制约铁路发展的关键环节,而铁路信号基础设备在保证行车安全方面发挥着越来越重要的作用,准确判断轨道占用,防止轨道继电器误动作,防止返回错误信号,对提高铁路运输效率具有重要意义。近年来,很多学者在光纤光栅轨道占用的应用上做了大量的研究。成巍坤[1]在光纤传感计轴技术中提出了用最小二乘法进行数据拟合,结合LabVIEW利用以太网进行数据互传,解决了列车速度过快这一问题,但它在计轴算法和寻峰算法中都存在着一些问题。全雨[2]提出了利用平滑滤波和有限元分析进行数据处理,但在温度补偿方面并没有做深入的工作。黄亮[3]提出了剪力型计轴的方式,但是没有得到具体的验证。
采用上下位机数据互传的方式,利用高斯多项式拟合算法、影响因子累加算法、自动寻峰和稳定的计轴算法,实现了轨道占用识别、方向判断、列车计轴等功能,成功将光纤光栅传感技术应用在铁道信号中。
1 轨道占用综合监测系统设计
1.1 FBG光纤解调原理简介
FBG光栅是使光纤的折射率在空间上发生变化而形成的一种光学无源器件,它的周期短,小于1 μm,是一种反射型的带通滤波器件。FBG周期折射率微扰仅对一窄段光谱产生影响,当宽带光波信号在进入到FBG传感器中时,FBG传感器仅是将具有特定波长的光波信号反射回来,而其它波段的光波信号则不受影响,继续沿光纤向前传输,对这种谐振波长反射现象的解释,是由William Bragg爵士最早提出,利用波长匹配条件αβ=0,推导出Brag方程为
(1)
式中,λ为波长;n为等效折射率;Λ为光栅周期。
式(1)表明,当宽带光波信号在FBG中传输时,由于产生模式耦合作用,满足Bragg方程的光波信号被反射。任何对FBG的外界影响,如温度、应变等,都会致使FBG中心波长发生变化,对比变化前后的中心波长,即可测定出受外界物理参量影响的程度,这就是FBG传感的基本机理。
1.2 系统组成
设计主要分为硬件和软件2部分,硬件主要包括电源模块、主控模块、数据采集模块、以太网模块、光纤驱动模块等。其中,主控芯片采用STM32F407vet6,执行速度能达到168 M;采集模块采用LTC2314芯片,LTC2314用的是SPI通信方式,它的采集精度是14位,采集速度可以达到4.5 Msps,抗干扰能力强,满足了实验要求;软件主要是自动寻峰算法、基于斯尼德桥的计轴算法、9点高斯拟合算法、影响因子累加算法和TCP/IP软件通信和界面显示软件设计。总体结构框图如图1所示。
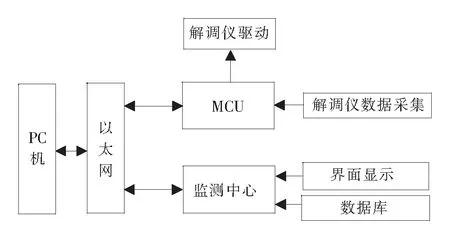
图1 系统的结构框图
2 轨道占用实验测试
2.1 自动寻峰算法
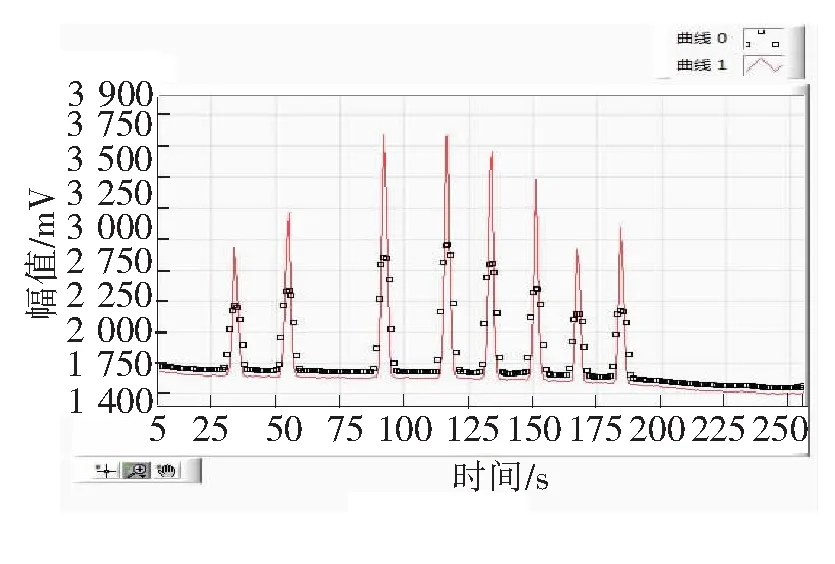
图2 数据波形
提出了一种新型寻峰方法,先把采集的光纤传感器原始数据(见图2)通过W5500以太网模块传输到上位机,上位机接收数据后利用巴特沃斯低通滤波器对数据进行滤波处理,将采集到的高频干扰信号除去从而使采集到数据波形平滑,然后再利用中心5点滑动平均法对采集到的数据进行处理(各个采样点左右两边各取2个数据),将数据处理前和处理后作差,对得到的数据进行分析,使数据进行抬升得出需要的数据点。图2所示最终得到的峰值中心分别为33、54、91、116、133、150、166、183。
2.2 9点高斯多项式拟合算法
高斯多项式算法的原理是先对采集的分峰截幅后的数据进行高斯多项式变换,然后通过最小二乘法对数据进行拟合,从而确定不同光纤传感器的波长中心位置。
光纤Brag传感器的反射谱近似为高斯分布,满足高斯函数
(2)
式中,P0为反射谱强度P的幅值;λi为光纤传感器i的中心波长;Δλi为反射谱3 dB带宽。然后对两边取ln对数,得
(3)
整理得
(4)
最终得
(5)

y(λ)=aλ2+bλ+c
(6)
对式(6),通过最小二乘法可求得系数a、b、c的值,最终可得中心波长
(7)

对式(7)中的a0、a1、a2分别求一阶导数得
(8)

(9)
对式(9)化简得
(10)

现场数据拟合结果如表1所示。
重力是指加在钢轨上的车重,光纤传感器1和光纤传感器2指的当钢轨承受不同的载重时,2个传感器波长变化情况,具体分析如表2所示,以1 t为一个单位,不同传感器相邻2个峰值之间差距如表2所示,由表1的数据可以看出,车重每增加1 t,光纤传感器的中心波长大概变化0.02 nm左右。

表1 不同重力下2个光纤传感器变化数据

表2 2个光纤传感器的波长差 nm
2.3 车轮计轴
车轮计轴是轨道占用测试的重要任务,计轴的原理是基于美国工程师Neel Sneed 提出的“Sneed Bridge”理论,计算4个应变片的弯矩和函数,得出相应的平衡曲线。监测实验前经测量验证:(1)光纤传感器受压致使中心波长的变化量正比于钢轨的弯矩变化量;(2)2个枕木之间的最大安装距离是40 cm,这边将其平均3等分,4个点依次安装4个光纤传感器A、B、C、D,对应波长变化分别为MA、MB、MC、MD,很好地满足了实验要求。根据斯尼德桥原理,当车轮在A、D之外,A、B之内,B、C之内,C、D之内时,分别计算相应区段的弯矩和函数,即MA+MB+MC+MD。本设计先采用平滑滤波对采集到的信号进行滤波处理,滤除采集到的外部干扰信号,如车辆经过时钢轨振动、外部敲打引起的干扰等,具体的滤波过程是先对网络接收的4个传感器中心波长差值数据进行频谱分析,然后根据选取的截止频率对网络传输过来的数据进行逐点滤波。经过比较,巴特沃斯低通滤波器已远远满足了设计要求,具体滤波结果如图3所示。然后再采用阈值分割原理和数据点数量判定逻辑对采集到的数据进行车轮识别处理,经过实验测量得到,每个轮子承受的车重最轻为2.3 t,最重为12.5 t,当轮重是2.3 t时,此时的波长比较差值最小为-0.01 nm,所以选取-0.01 nm作为门限阈值。如图3所示,就代表有3个车轮依次跨过4个传感器。
2.4 方向判别
根据斯尼德桥原理,每个车轮经过时都可以输出一个弯矩和曲线,如图3所示。但仅靠此原理无法判断列车的行车方向,因此,本设计利用斯尼德桥曲线阈值点与A、D传感器差值曲线结合分析,就可以准确判断列车的行驶方向。采用3种状态表示,1代表上行、-1代表下行、0代表没有车经过。具体的波形显示如图4所示。
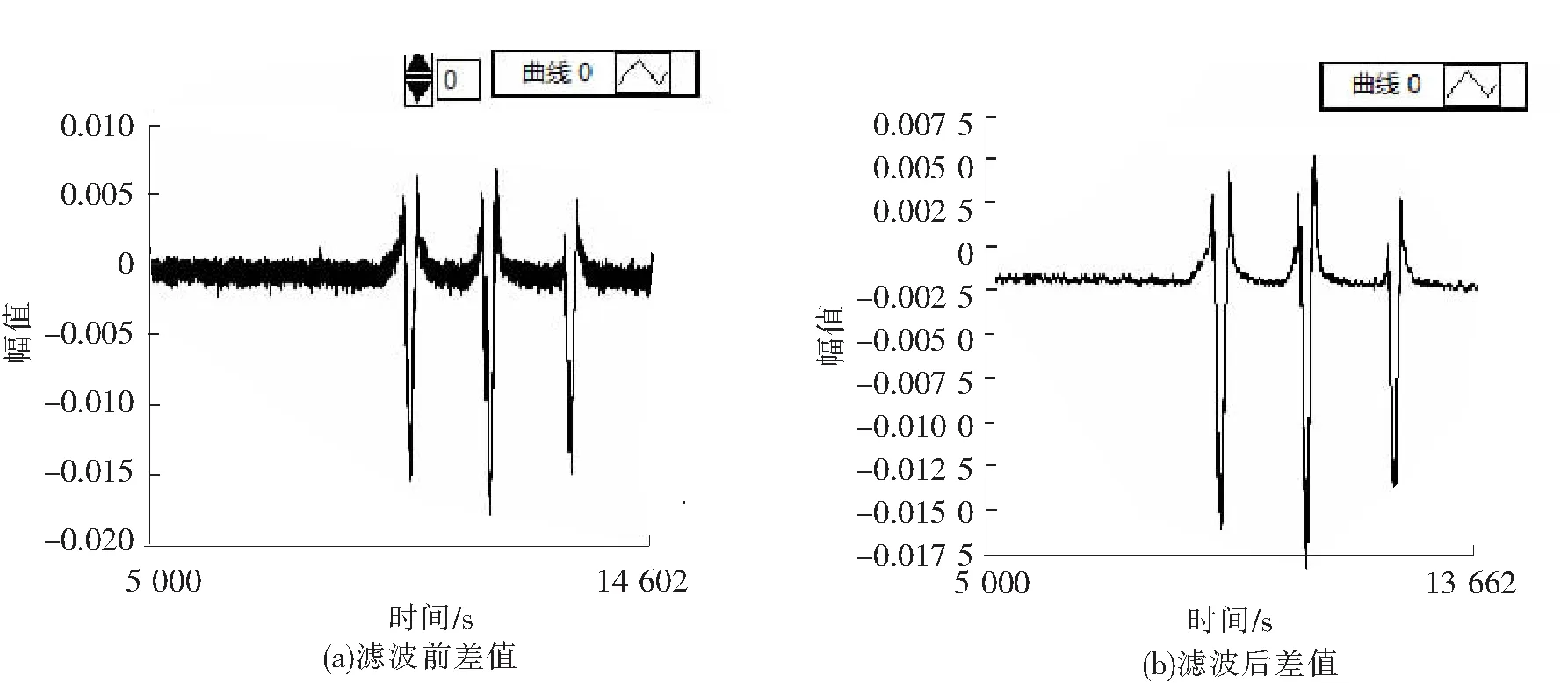
图3 计轴滤波图

图4 方向识别图
图4(a)显示原始的曲线,图4(b)显示3个车轮分别经过A、D光纤传感器时的输出曲线,即在确定有车轮经过时,利用阈值采集车轮经过4个光纤传感器时的数据点,然后选取此段数据点的中心位置,对前后截取的数据进行求和作差,当差值大于0时,即为1,上行方向行驶;差值小于0时,即为-1,下行方向行驶。经过计算显示可以得知,车轮1、2的行驶方向和车轮3的行驶方向不相同。
2.5 其它因素分析
为求出中心波长的偏移程度,必须求得基础波长和实时波长,本设计采用影响因子法,即通过设置影响因子的大小来选取基础波长,一般来说,当列车经过时,基础波长变化越小越好,这样测得的中心波长差比较显著。所以经过实验,基础因子选取10 000。当采集过来的数据数组大小每次计数到1 120时,计算平均值并与原始基础波长做差值,将得到的差值除以影响因子,然后与原始基础波长相加,就得到了最新的基础波长。影响因子的选取和TCP/IP的通信速率有着密切关系。
光纤传感器受温度和应变的变化比较显著,所以设计必须排除温度的干扰。为了排除温度对中心波长的变化影响,采用了自动寻峰方法,即每0.5 h,PC机都会自动寻峰并且将寻到的中心波长的数据下发给下位机,供下位机进行波长拟合,这样通过不断地更新基础波长的值,就避免了温度的影响,最终经过软件调试,使上位机和下位机可以正常通信。程序如图5所示。
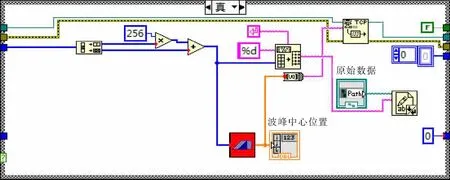
图5 上下位机通信程序
2.6 界面程序制作
为了能够对轨道电路的状态进行查询,将计轴结果通过LabVIEW程序[4]处理存入了SQL数据库,方便后期对故障进行判断,数据库中记录了当时时间的轨道电压、入口计轴数、出口计轴数及最终的判断结果。图6是数据库写入程序。

图6 数据库写入程序
3 结论
详细叙述了光线传感计轴技术中的一些实际问题的解决方法,设计了一套采用光纤计轴传感技术的轨道电路监测系统,即一种轨道电路监测系统管理平台。归纳总结,主要结果如下。
(1)深入分析了现有铁道信号基础设备监测系统,充分论述了现有轨道占用检测设备和微机监测系统的原理、研究现状及弊端。
(2)完成了光纤传感轨道占用检测的软件功能,包括程序框架搭建设计,TCP/IP通讯、自动寻峰处理、计轴测量、高斯多项式拟合、数据分析处理、前面板界面显示等功能。
(3)利用SQL数据库实现了数据的存储,通过LabVIEW对采集的数据进行分析处理,并通过调用DATABASE函数库[5]链接到SQL数据库,实现了数据采集、处理、转存一体化。
猜你喜欢
阅读(科学探秘)(2021年8期)2021-09-01
数学大王·低年级(2021年2期)2021-02-21
家庭影院技术(2020年1期)2020-06-24
小读者(2019年24期)2020-01-19
家庭影院技术(2019年4期)2019-04-17
汽车观察(2019年2期)2019-03-15
家庭影院技术(2018年9期)2018-11-02
电子制作(2017年13期)2017-12-15
中南大学学报(自然科学版)(2016年2期)2017-01-19
中国照明(2016年4期)2016-05-17
